非线性控制系统分析Word格式.docx
《非线性控制系统分析Word格式.docx》由会员分享,可在线阅读,更多相关《非线性控制系统分析Word格式.docx(24页珍藏版)》请在冰豆网上搜索。
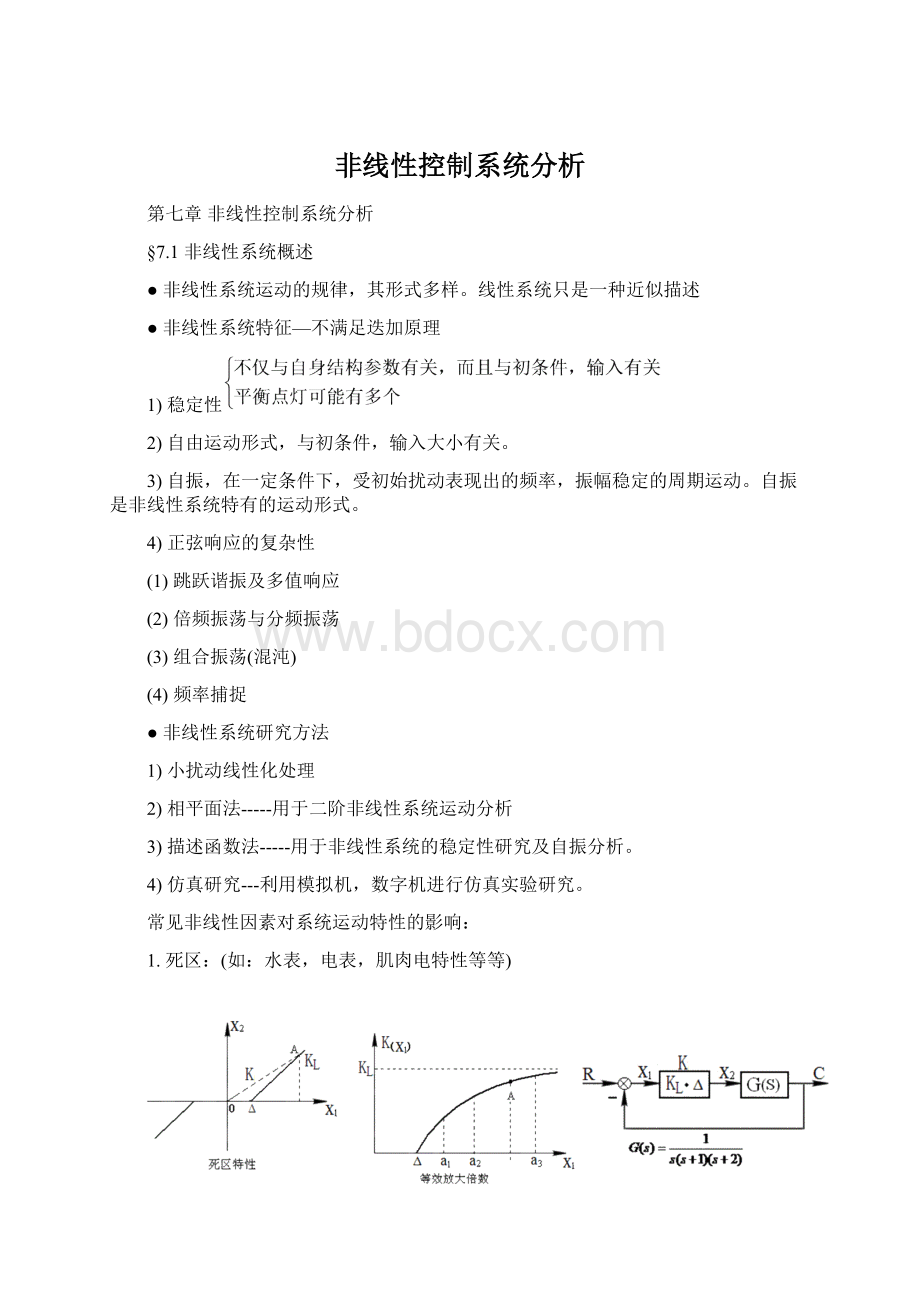
死区对系统运动特性的影响:
可见:
非线性系统稳定性与自由响应和初始扰动的大小有关。
2.饱和(如运算放大器,学习效率等等)
饱和对系统运动特性的影响:
进入饱和后等效K↓
3.间隙:
(如齿轮,磁性体的磁带特性等)
间隙对系统影响:
1)间隙宽度有死区的特点----使
2)相当于一个延迟τ时间的延迟环节,振荡性
减小间隙的因素的方法:
(1)提高齿轮精度;
(2)采用双片齿轮;
(3)用校正装置补偿。
4.摩擦(如手指擦纸)
摩擦引起慢爬现象的机理
改善慢变化过程平稳性的方法
摩擦对系统运动的影响:
影响系统慢速运动的平稳性
5.继电特性:
对系统运动的影响:
7.2相平面法基础(适用于二阶系统)
1.相平面相轨迹
二阶非线性系统运动方程:
――定常非线性运动方程
即:
Ø
相平面法是用图解法求解一般二阶非线性控制系统的精确方法。
它不仅能给出系统的稳定性信息和时间特性信息,还能给出系统运动轨迹的清晰图象。
二维空间(平面)上表示点的运动的概念,可以扩展到N维空间中去。
1.相平面:
由构成的,用以描述系统运动特性的平面。
相轨迹:
随时间变化在相平面上描绘出来的轨迹。
例:
欠阻尼二阶系统响应的相平面描述----相轨迹
系统方程为求相轨迹方程。
解:
得:
――椭圆方程
系统特征方程:
特征根:
(中心点)
平衡点(奇点):
自控演示实验x-y记录仪所画的相轨迹:
2.二阶系统极点分布,奇点类型及相轨迹形式(见挂图)
自由运动方程范围极点位置奇点名称
注:
1).奇点=平衡点=各阶导数为0之点;
2).实极点数值=特殊相轨迹的斜率;
3).
例1.系统方程为:
作相轨迹
解:
原方程=
即:
3.利用线性系统(二阶)奇点性质概略地作出一类二阶非线性系统的相轨迹。
例2.系统运动方程:
,作出其相轨迹。
原方程:
解
(1):
――稳定焦点
解
(2):
――鞍点
作图,可见初始条件≠0时自由运动结果总发散(向负方向)
例3.系统运动方程:
,作相轨迹。
作图:
见下页:
可见:
系统自由运动总是稳定的:
奇点为一线段[-1,1],依初始条件不同,
最终可以稳定在[-1,1]之间任一点上。
例4.系统运动方程为求出全部平衡点,并分析其特性。
令
∴平衡点
当
∵在平衡点附近变化时,是小量,与等价。
∴原方程为
平衡点颁布及其附近的相轨迹:
4.相轨迹作图法(解析法,等斜线法,图弧法)
(1)等倾斜线法:
系统方程为:
得出等斜线方程:
给定不同的值,画出不同的等斜线,在上面画出斜率等于相应的短线,可以构成相轨迹切线的方向场。
由此可画出非线性运动的相轨迹。
4.等倾斜线法
例1,系统如右,用等倾斜线法作系统相轨迹。
解:
对线性部分:
Ⅰ:
Ⅲ:
,同上讨论可得:
1
∞
-3
-2
Ⅰ:
2
-1
Ⅲ:
Ⅱ:
画出等斜线并作出相轨迹见3号图:
系统自由运动分析:
(1)自由运动收敛,最终达到稳定。
(2)最终平衡位置
例2,在例1中,将非线性特性改为纯滞环继电特性。
画等斜线(同例1,ⅠⅢ区)作相轨迹见6号图
系统自由运动分析:
自由运动的最终状态是自振(对应有一个极限环)
名类极限环(见挂图)
7.3 描述函数法
1.描述函数一般概念
如右图示:
对非线性环节输入正弦信号
一般地输入是一个周期信号
对于理想的继电特性输出
可以把周期信号展开成富立哀级数:
其中:
对于中的基波分量(n=1)有:
对理想继电特性输入(方波信号)中,基波分量可以如下求出:
由理想继电特性的对称性,可以确定。
由的奇函数特性 可以确定
如果把各次谐波都加上有:
――方波信号是各次谐波分量的迭加
而在各次谐波分量中,基波分量最能表征的特征。
描述函数定义:
对一非线性特性,若输入时
其输出中的基波分量为则定义
非线性特性的描述函数:
描述函数――从线性系统频率特性的角度来描述非线性特性的一种函数。
描述函数是非线性环节的“频率特性”,是非线性特性的谐波线性化,线性系统频率特性是非线性系统描述函数的特例。
描述函数与频率特性概念上不同,但有类似的地方是其谐波线性化,是“频率特性”概念的推广。
理想继电特性:
2.常见非线性特性的描述函数
描述函数的确定(以一般继电特性为例)
1)确定上的特征点由输入曲线可见:
对:
由:
2)求中基波分量的系数
特例:
:
理想继电特性
无滞环有死区
纯滞环
可见,描述函数一般是非线性特性前,输入正弦信号幅值的函数,并且在一般情况下,是一个复数。
3.用描述函数分析非线性系统
为何引出的概念:
实际物理系统,严格地讲,都是程度不同地带有非线性因素,非线性系统的许多运动规律是线性系统领域看不到的,如非线性自振。
若一个实际系统(如火炮系统)发生自振,当瞄准具对准一个目标,炮口由于自振而不停摆动,是打不中目标的,另外对系统本身磨损也很厉害,所以有必要把非线性系统的稳定性及自振问题专门拿出来研究。
描述函数法是专门研究一类非线性系统稳定性及其自振问题的方法。
1)描述函数分析法的基本思想
假设一个非线性系统满足以下三个条件:
注:
许多实际系统均可以满足此条件,所以此法具有较广的实用范围。
则:
的输出经的滤波处理信号近似为一正弦信号这样,可以近似把用其基波信号来代替,用线性系统频率分析法的思想来研究系统稳定性问题。
(2)系统稳定性分析:
由右图可见:
系统自振的条件为(必要条件):
――自身输出反号后满足自身输入的需要
即:
借用奈奎斯特稳定判据,视负倒描述函数为广义的点,则有:
判定非线性系统稳定性的方法:
对理想的继电系统:
负倒描述函数
当变化时,描绘出一条曲线(不是定点)
当线性部分传递函数为:
(3)负倒描述函数曲线的绘制及广义点的变化规律:
以纯滞环继电系统为例:
把――等效非线性部分的增益折算到线性部分增益之中。
则标称化的负倒描述函数:
可见,的虚部是一个常数,以为自变量计算画图:
2.3
2.5
3
4
5
6
-0.785
-1.36
-1.63
-1.78
-2.22
-3.04
-3.85
-4.65
可见,广义的点是随X(当h确定时)的变化而变化的,不是像线性系统时的固定点。
当非线性系统工作状态(对应一个确定X值)不同时,该广义点在曲线上移动。
见挂图――常见非线性特性的曲线。
(4)自振分析:
<
1>
必要条件:
――曲线与曲线有交点。
如右系统:
1)、对于A――穿进曲线的点
2)、对于B――穿出曲线的点
可见,当初始扰动使不同时,系统运动规律不同:
2>
自振的判定方法:
(总结出来的结论)
例:
P32-5中交点A是一个稳定的自振点,该系统不论初始扰动大小,最后总要自振(不会发散,也不会收敛到零)
3>
自振参数的确定及参数变化时系统运动的规律
自振幅值――由交点B上的X值确定(系统各点的幅值可以折算过去)
自振频率――由交点B上的值定,参数变化时,系统运动规律分析:
参数变体时,系统运动的规律分析:
①变化时,(不变,变化时)
②变化时(变化,但保持不变)
:
对应B点:
常值
③
4>
定量计算
90年西工大研究题(10分)
已知系统结构图如右,试求系统产生自振时的振幅和频率()理想继电特性描述函数
解:
依题大致作出和图形:
明显,A点为稳定的自振点(虚部为0的点)
令其虚部为0:
求实部值:
由自振的必要条件:
有:
非线性系统如右图所示:
,要求要产生一个的周期信号,求系统参数
分析:
画出与曲线可见:
当K改变时,只影响自振幅值,不改变自振频率,而当时,会使自振频率降低,幅值增加。
所以调节参数实现所需的自振参数。
由自振条件:
代入:
∴
将右图非线性系统化为串联形式,求出等效的开环传递函数
解法一:
将非线性特性视为线性环节来对待,则由梅逊公式:
解法二:
用结构图等效化简法:
如右图化简∴
 升级会员
升级会员 