最新伺服驱动器参数设置步骤.docx
《最新伺服驱动器参数设置步骤.docx》由会员分享,可在线阅读,更多相关《最新伺服驱动器参数设置步骤.docx(24页珍藏版)》请在冰豆网上搜索。
最新伺服驱动器参数设置步骤
伺服驱动器参数
打开DriveTop软件之后出现下图画面选择“OnlineRS232IndraDrive”
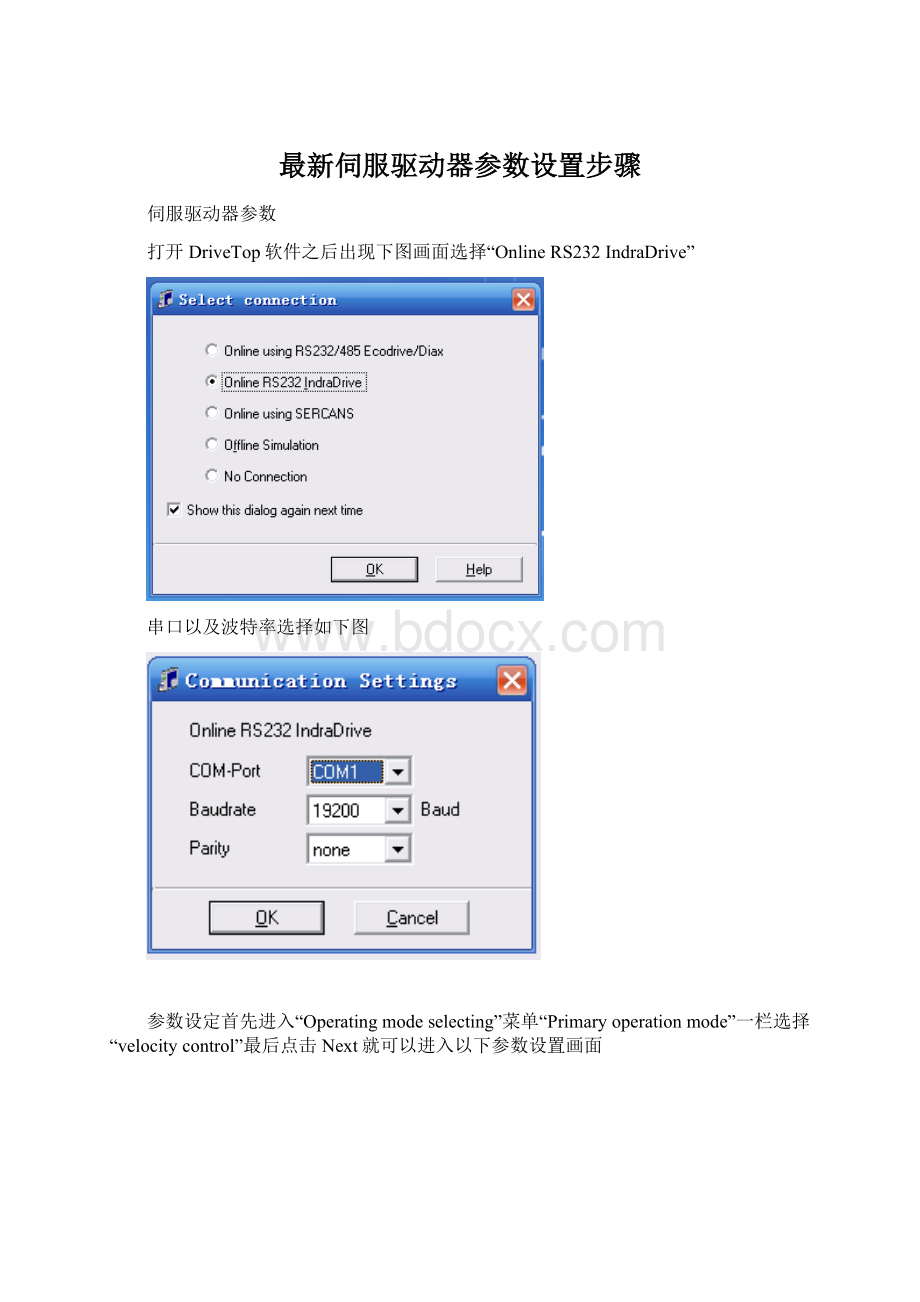
串口以及波特率选择如下图
参数设定首先进入“Operatingmodeselecting”菜单“Primaryoperationmode”一栏选择“velocitycontrol”最后点击Next就可以进入以下参数设置画面
MAD160-C-0150-SA-S2-K-G-0-35-N1发动机型号
Temperaturesensor:
KTY84
2500Rpm需要设置
Accelerationfactor:
1需要设置
Ramp2pitch:
150rad/s与Decelerationramp2:
150rad/s需要设置
Limitvalues:
10000和2500与PI:
46和6需设置
Torque/forcelimitvaluepositive:
400%
Torque/forcelimitvaluenegative:
-400%
Torque/forcepeaklimit:
400%
Bipolartorque/forcelimitvalue:
400%
需设置
DriveHaltaccelerationbipolar:
800rad/s
Standstillwindow:
5Rpm
Resolutionofencoderemulat:
2048Counts/Rev
Makerpulseoffset:
0CountsMakerpulsedistance:
2048Counts
注:
此软件为翻页就会保存修改数据,未提到的参数为默认制值
PLC部分
一、填空题
1、说出下列指令的名称
LD逻辑取指令
LDI逻辑取反指令
OUT驱动线圈输出指令
AND单个常开触点的串联连接指令
ANI单个常闭触点的串联连接指令
OR单个常开触点的并联连接指令
ORI单个常闭触点的并联连接指令
LDP取脉冲上升沿指令
LDF取脉冲下降沿指令
ANDP与脉冲上升沿指令
ANDF与脉冲下降沿指令
ORP或脉冲上升沿指令
ORF或脉冲下降沿指令
ORB电路块的或操作指令
ANB电路块的与操作指令
MPS进栈指令
MRD读栈指令
MPP出栈指令
MC主控指令
MCR主控复位指令
INV取反指令
SET置位指令
RST复位指令
PLS输入信号上升沿产生微分输出指令
PLF输入信号下降沿产生微分输出指令
NOP空操作指令
END总程序结束指令
RET步进返回指令
STL步进梯形指令
TO从特殊功能模块写入指令
FROM从特殊功能模块读出指令
SFTR位右移位指令
SFTL位左移位指令
MOV数据传送指令
INC加1指令
DEC减1指令
CMP比较指令
ZCP区间比较指令
CJ条件跳转指令
ZRST区间复位指令
ADD二进制加法指令
SUB二进制减法指令
2、PLC的输入/输出继电器采用8进制进行编号,其它所有软元件均采用10进制进行编号。
3、如图示:
若闭合X1,
则Y3、Y2、Y1、Y0中Y3亮。
 升级会员
升级会员 