智能仪器重点.docx
《智能仪器重点.docx》由会员分享,可在线阅读,更多相关《智能仪器重点.docx(12页珍藏版)》请在冰豆网上搜索。
智能仪器重点
1.测量误差的分类、特点及消除。
误差的分类:
系统误差(简称系差)、随机误差(又称偶然误差)、粗大误差(也称为疏失误差,简称粗差)
系统误差的判断:
理论分析法、校准和比对法、改变测量条件法、剩余误差观察法、公式判断法
消弱系统误差的典型测量技术:
零示法、替代法(又称置换法)、补偿法(常用在高频阻抗、电压、衰减量等测量中)、对照法(又叫交换法)、微差法(又叫虚零法或差值比较法,实质上是一种不彻底的零示法)、交叉读数法(对照法的一种特殊形式)
2.A/D转换器指标、分类、特点。
指标:
分辨率与量化误差、转换精度、转换速率、满刻度范围
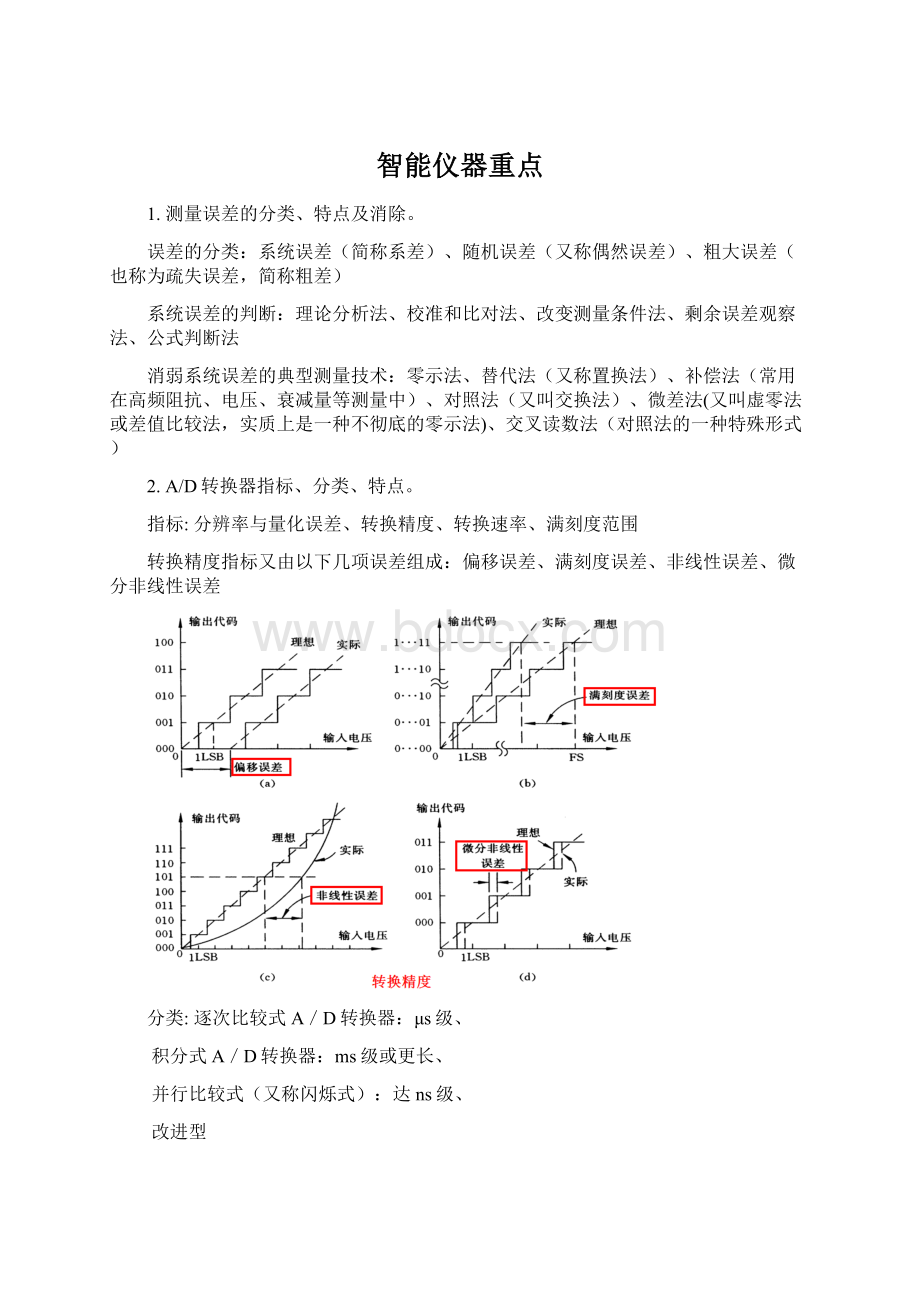
转换精度指标又由以下几项误差组成:
偏移误差、满刻度误差、非线性误差、微分非线性误差
分类:
逐次比较式A/D转换器:
μs级、
积分式A/D转换器:
ms级或更长、
并行比较式(又称闪烁式):
达ns级、
改进型
积分式A/D转换器是一种间接式A/D转换器,其工作原理是:
先用积分器把输入模拟电压转换成中间量(时间T或频率f),然后再把中间量转换成数字。
双积分式A/D转换器又称双斜式A/D转换器,其转换过程在逻辑控制电路的控制下按以下三个阶段进行。
预备阶段、定时积分阶段T1、定值积分阶段T2
3.A/D采集接口设计,转换量值关系。
4.DVM分辨力计算,输入电路组成及作用
分辨力指DVM能够分辨最小电压变化量的能力,通常以使显示器末位跳一个字所需输入的最小电压值来表示。
分辨力与量程及位数有关,量程愈小位数愈多,分辨力就愈高。
DVM通常以仪器最小量程的分辨力来代表仪器的分辨力,例如最小量程为1V的4位DVM的分辨率为100μV。
输入电路主要由输入衰减器、输入放大器、有源滤波器、输入电流补偿电路等部分组成。
输入电路的主要作用是提高输入阻抗和实现量程转换。
5.DMM(数字多用表)多功能实现及测量原理。
数字多用表(DMM)指除能测量直流电压外,还同时能测量交流电压、电流和电阻等参数的数字测量仪器。
其组成框图如图
DMM采用的交直流转换器主要有平均值转换器和有效值转换器。
恒流源法(二端测量)的测量精度主要取决于恒流源电流值的精度和稳定性,以及恒流源内阻是否足够大。
6.计数器法测频、测周、多周期同步测量原理。
频率测量原理
频率为fx的被测信号经A通道放大整形后输往主门(闸门)。
同时,晶体振荡器输出信号经分频器可获得各种时间标准(称时标),闸门时间选择开关将所选时标信号加到门控双稳,再经门控双稳形成控制主门启闭的作用闸门时间T。
则在所选T内主门开启,被测信号通过主门进入计数器计数。
若计数器计数值为N,则被测信号的频率fx为:
fx=N/T
周期测量原理
周期为Tx的被测信号经B通道处理后再经门控双稳输出作为主门启闭的控制信号,使主门仅在被测周期Tx时间内开启。
同时,晶体振荡器输出经倍频和分频得到了一系列的时标信号,通过时标选择开关,所选时标即经A通道送往主门。
在主门开启时间内,时标进入计数器计数。
若所选时标为T0,计数器计数值为N,则被测信号的周期为:
Tx=N×T0
多周期测量
如果被测周期较短,可以采用多周期测量的方法来提高测量精度,即在B通道和门控双稳之间插入十进分频器,这样使被测周期得到倍乘即主门的开启时间得到了倍乘。
若周期倍乘开关选为×10n,则计数器所计脉冲个数将扩展10n倍,所以被测信号的周期为
TA-B测量原理
图中,为启动信号,是停止信号,被测时间间隔为
=N×T0
多周期同步测量原理
7.测频、测周如何降低计算误差。
通用计数器测量误差习惯于用相对误差的形式来表示.各功能的误差表达式主要由三种类型误差合成。
最大计数误差(±1误差)、标准频率误差、触发误差
最大计数误差(±1误差):
对于一次计数过程,其结果可能为N,也可能为N+1或N-1。
即最大计数误差为ΔN=±1。
该项误差将使仪器最后的显示结果会有一个字的闪动。
最大计数误差相对误差的形式为
最大计数误差的特点是:
不管计数N是多少,ΔN的最大值都为±1。
为了减少最大计数误差对测量精度的影响,仪器使用中采取的技术措施是:
尽量使计数值N大。
使ΔN/N误差相应减少。
例如在测频时,应尽量选用大的闸门时间;在测周时,应尽量选用小的时标信号,必要时使用周期乘率开关,进行多周期平均测量。
标准频率误差在测频时取决于闸门时间的准确度,在测周时取决于时标的准确度。
为了使标准频率误差对测量结果产生影响足够小,应认真选择晶振的准确度。
触发误差的大小为:
Um——信号的振幅;
Un——干扰或噪声的振幅
注:
被测信号频率很低时,用测周法;
被测信号周期很小时,用测频法。
8.GPIB仪器总线组成,区分仪器功能和接口功能。
GP-IB标准包括接口与总线两部分:
接口部分是由各种逻辑电路组成,与各仪器装置安装在一起,用于对传输的信息进行发送、接收、编码和译码;总线部分是一条无源的多芯电缆,用做传输各种消息。
仪器功能:
把收到的控制信息变成仪器设备的实际动作,如调节频率、调节信号电平、改变仪器的工作方式等。
接口功能:
完成系统中各仪器设备之间的通讯,确保系统正常工作。
9.GPIB接口特性、三线挂钩原理。
基本特性:
(1)可以用一条总线互相连接若干台装置,以组成一个自动测试系统。
装置数目最多15台,互连总线长度不超过20m。
(2)数据传输采用并行比特(位)、串行字节(位组)双向异步传输方式,其最大传输速率不超过1兆字节每秒。
(3)总线上传输的消息采用负逻辑。
低电平(≤+0.8V)为逻辑“1”,高电平(≥+2.0V)为逻辑“0”。
(4)地址容量。
单字节地址:
31个讲地址,31个听地址;双字节地址:
961个讲地址,961个听地址。
(5)一般适用于电气干扰轻微的实验室和生产现场。
三线挂钩:
(1)听者使NRFD呈高电平,表示已做好接收准备,总线上所有听者是“线或”连接至NRFD线上,因此只要有一个听者未做好准备,NRFD就呈低电平。
(2)讲者发现NRFD呈高电平后,就把数据放在DIO线上,并令DAV为低电平,表示DIO线上的数据已经稳定且有效。
(3)听者发现DAV线呈低电平,就令NRFD呈低电平,表示准备接收数据。
(4)在接收数据的过程中,NDAC线一直保持低电平,直至每个听者都接收完数据,才上升为高电平。
所有听者也是“线或”接到NDAC线上。
(5)当讲者检出NDAC为高,就令DAV为高,表示总线上的数据不再有效。
(6)听者检出DAV为高电平,就令NDAC再次变为低电平,以准备进行下一个循环过程。
10.硬件故障自检、自检算法,自动测量功能实现。
自检就是利用事先编制好的检测程序对仪器的主要部件进行自动检测,并对故障进行定位。
自检方式:
开机自检、周期性自检、键控自检
自检算法:
ROM故障的测量算法常采用“校验和”方法,具体作法是:
在将程序机器码写入ROM的时候,保留一个单元(一般是最后一个单元),此单元不写程序机器码而是写“校验字”,“校验字”应能满足ROM中所有单元的每一列都具有奇数个1。
自检程序的内容是:
对每一列数进行异或运算,如果ROM无故障,各列的运算结果应都为“1”,即校验和等于FFH.
RAM的检测:
常选特征字55H和AAH,分别对RAM中的每一个单元进行先写后读的操作。
判别读/写内容是否相符的常用方法是,把该单元的内容求反并与原码进行“异或”运算,若结果为FFH,表明正常。
总线的自检:
使被检测的每根总线依次为1态,其余总线为0态。
如果某总线停留在0态或1态,说明有故障存在。
智能仪器通常含有:
自动量程转换、自动零点调整、自动校准功能,自动触发电平调节。
11.智能仪器随机误差和系统误差处理方法。
随机误差的处理方法:
原因:
测量过程随机因素,大多数按正态分布。
消除:
取多次测量结果的算术平均值
系统误差的处理方法:
利用误差模型修正系统误差
利用校正数据表修正系统误差
通过曲线拟合来修正系统误差
12.数字滤波方法及其特点。
中值滤波
特点:
中值滤波对去掉脉冲性质的干扰比较有效,并且采样次数N愈大,滤波效果愈强,但采样次数N太大会影响速度,所以N一般取3或5。
对于变化很慢的参数,有时也可增加次数,例如15次。
对于变化较为剧烈的参数,此法不宜采用。
平均滤波(又分为去极值平均滤波、移动平滑滤波、加权平均滤波)
特点:
算术平均滤波对滤除混杂在被测信号上的随机干扰非常有效。
一般说来,采样次数N愈大,滤除效果愈好,但系统的灵敏度要下降。
为了提高运算速度,程序中常用移位来代替除法,因此N一般取4,5,16等。
低通数字滤波
13.智能频率计等精度测量原理。
采用的方法在中界频率附近仍不能达到较高的测量精度,若采用多周期同步测量方法,便可较容易地在全频段达到10-4量级,实现等精度的频率测量。
14.信号发生器分类、特点和指标。
(1)照输出信号波形特点,信号发生器可分为:
正弦信号发生器、脉冲信号发生器、函数信号发生器、噪声信号发生器等。
(2)按照输出信号的频率范围分类,信号发生器一般分为:
低频信号发生器,高频信号发生器,也可以细分为超低频、低频、视频、甚高频、超高频多种信号发生器,
(3)按照产生信号方法及信号发生器组成的不同,可分为:
传统的通用信号发生器和智能型的合成信号发生器两类。
低频信号发生器常以RC文氏电桥振荡器做主振器,高频信号发生器常以LC振荡器做主振器。
指标:
正弦信号发生器性能通常用频率特性、输出特性和调制特性三大指标来评价。
15.信号发生器原理及实现(包括频率合成和信号输出)。
DDS的基本组成原理:
可以将把要输出的正弦波形取样数据预先顺序存放在一段ROM单元中,然后在时钟的控制下,顺序从这些ROM单元中读出,再经过D/A转换,就可以得到一定频率的正弦波形信号。
这就是DDS的基本原理。
设取样时钟频率为fc,一个正弦波由个取样点构成,则输出正弦波信号的频率为:
名词解释
曲线拟合:
指从n对测定数据(xi,yi)中,求得一个函数f(x)来作为实际函数的近似表达式。
系统误差:
指在相同条件下多次测量同一量时,误差的绝对值和符号保持恒定或在条件改变时按某种确定的规律而变化的误差。
等精度测量:
在保持测量条件不变的情况下对同一被测量进行的多次测量过程称作等精度测量。
(这里所说的测量条件包括所有对测量结果产生影响的客观和主观因素如测量中使用的仪器、方法、测量环境,操作者的操作步骤和细心程度等。
)
随机误差又称偶然误差:
指对同一量值进行多次等精度测量时,其绝对值和符号均以不可预定的方式无规则变化的误差。
粗大误差:
在一定的测量条件下,测得值明显地偏离实际值所形成的误差称为粗大误差,也称为疏失误差,简称粗差。
分辨力(分辨率):
指DVM能够分辨最小电压变化量的能力,通常以使显示器末位跳一个字所需输入的最小电压值来表示。
最大计数误差(±1误差):
对于一次计数过程,其结果可能为N,也可能为N+1或N-1。
即最大计数误差为ΔN=±1。
该项误差将使仪器最后的显示结果会有一个字的闪动。
尖峰误差:
尖峰误差是指输入代码发生变化时而使输出模拟量产生的尖峰所造成的误差。
自检:
利用事先编制好的检测程序对仪器的主要部件进行自动检测,并对故障进行定位。
智能仪器在检测参数时,仪器直接采集的数据并不等于原来带有量纲的参数值,这种转换就是工程量变换,又称标度变换。
(标度变换一般分为线性参数标度变换和非线性参数标度变换。
智能仪器中的标度变换是由软件自动完成的。
)
等精度的频率测量:
采用的方法在中界频率附近仍不能达到较高的测量精度,若采用多周期同步测量方法,便可较容易地在全频段达到10-4量级,实现等精度的频率测量。
等精度频率计的测量过程:
测量准备、测量开始、测量结束、数据处理
相位测量功能:
用于测量A、B两个通道信号间的相位差。
其测量原理是:
先测量时间间隔TA-B,再测量输入信号A的周期PA,然后按公式TA-B×360/PA计算。
输出电平的稳定度是指输出电平随时间的变化;平坦度是指在有效频率范围内调节频率时,输出电平的变化,即输出电平的频响。
虚拟仪器:
指通用计算机上添加几种带共性的基本仪器硬件模块,通过软件来组合成各种功能的仪器或系统的仪器设计思想。
频率准确度:
是指信号发生器预调值(即仪器度盘指示或数字显示的频率值)与实际输出的信号频率值之间的偏差,通常用相对误差表示
频率稳定度:
指外界条件恒定不变的情况下,在规定时间内,信号发生器输出频率相对于预调值变化的大小。
频率稳定度表达式为:
输出电平范围:
是指信号发生器输出信号幅度的有效范围,即所能提供的最小和最大输出电压的可调范围。
同步测量:
由于D触发器的同步作用,减小了±1误差的影响,即
的值为多周期测量的平均值。
 升级会员
升级会员 