PowerScanAuto自动化说明书.docx
《PowerScanAuto自动化说明书.docx》由会员分享,可在线阅读,更多相关《PowerScanAuto自动化说明书.docx(21页珍藏版)》请在冰豆网上搜索。
PowerScanAuto自动化说明书
PowerScan-Auto自动化
三维测量与检测系统
武汉惟景三维科技有限公司
一外观简介
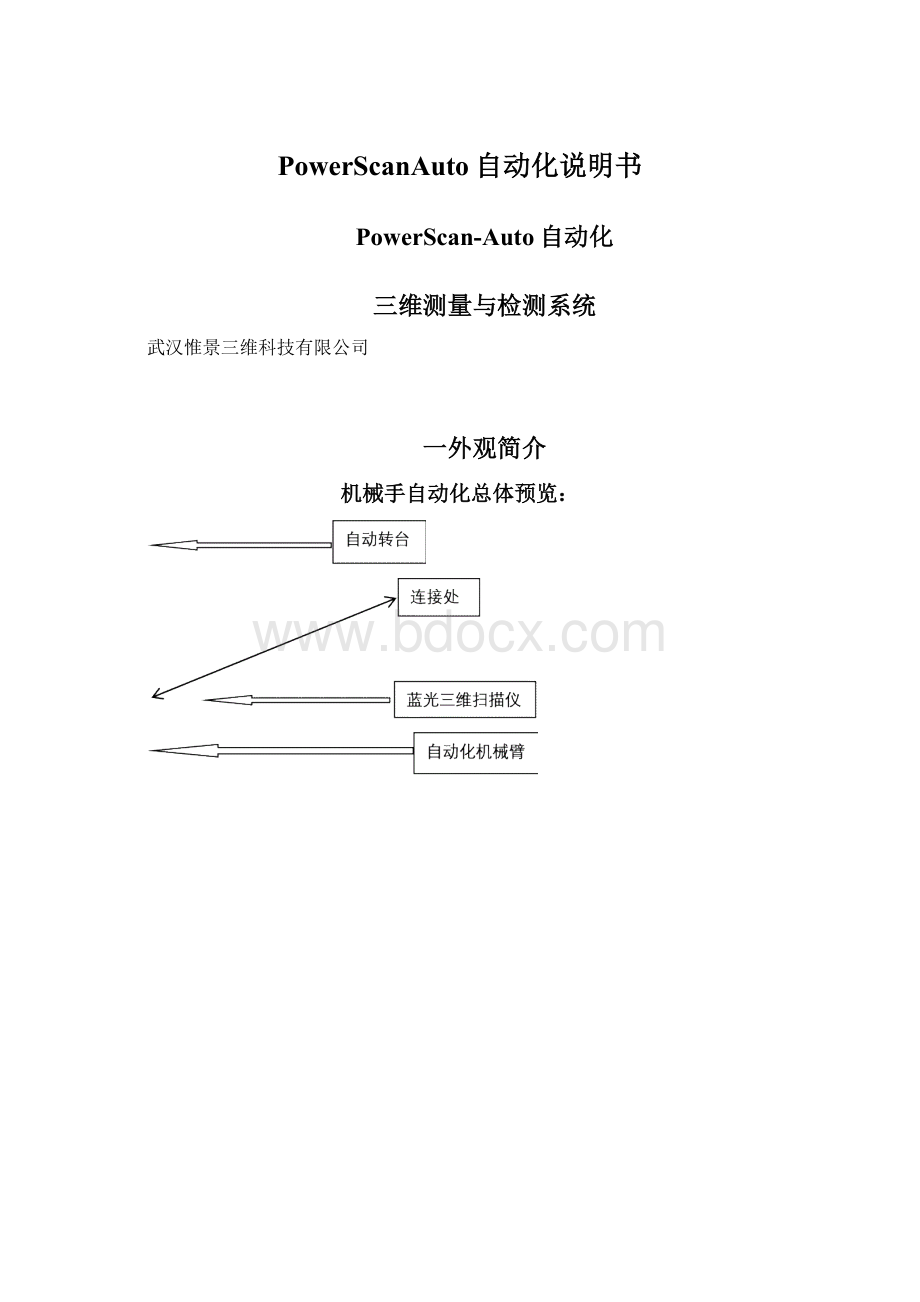
机械手自动化总体预览:
机械手自动化分项预览:
自动化扫描仪ABB自动化机械臂
二机械手自动化仪器分项简介
扫描仪结构示意图
扫描仪工作原理
扫描时,光栅投影装置投影数副特定编码的结构光到待测物体,成一定夹角的两个摄像头同步采集相应的图像,然后对图像进行编码和相位计算,利用三角形扫描原理、匹配技术,算解出两个摄像头公共视区内像素点得到三维坐标。
自动化三维扫描与检测系统由于其自动化程度高,可针对不同外形的产品进行最优扫描路径规划,从而高效完成检测任务,整个过程无需人为干预。
使用的是武汉惟景三维科技有限公司所生产的PowerScan-Auto系列自化扫描测量与检测系统,设备由以下工业级机械臂与扫描仪组成。
扫描仪具体参数如下:
单幅测量范围(可调节)
摄像头分辨率(pixels)
测量点距(mm)
测量精度(mm)
单幅测量时间(S)
输出格式
200×150~400×300
131万
~
±
AC、ASC等标准格式
扫描设置简介
(1)先检查电源和各种信号线有没有接上,再打开相应电源,最后打开本三维测量软件。
(2)点击“三维测量”标签进入三维测量界面,如图
三维测量界面
工程设置:
新建和保存工程。
视图设置:
●三维视图:
使物体三维扫描数据窗口最大化;
●图像视图1:
使相机1视图窗口最大化;
●图像视图2:
使相机2视图窗口最大化;
●显示纹理:
显示三维数据纹理;
●显示标记:
在自动拼合过程中,显示扫描计算出的标志点。
系统标定:
标定相机参数。
参数设置:
●系统设置:
设置三维测量和自动拼合的参数
三维测量:
●图像预览:
预览相机视图;
●三维测量:
测量数据;
●确认当前数据:
确认使用当前扫描所得数据进行自动拼合;
●撤销当前数据:
取消使用当前扫描所得数据进行自动拼合。
投影仪设置:
●投影亮度:
设置投影亮度。
三系统操作步骤
扫描头操作
扫描仪工作环境要求
环境温度:
-10-35℃(为达到最佳测量精度,将机器至于恒温环境为宜)。
环境空气湿度:
10-90%非液化(请尽量保持环境干燥)。
环境光线:
应将本机器置于无频闪光源、弱光照的稳定光强环境。
工作环境:
置于可稳定放置的环境中工作。
通常将其与三脚架稳固连接,或者直接将其置于工作平台上使用。
其他要求:
工作时扫描仪与样品的工作距应保持固定,直至扫描结束(周围无震动源)。
请勿敲击、碰撞本产品,运输时请将其置于工具箱中,轻拿轻放。
配置要求
电源:
220V交流电源
操作系统:
Windows764位旗舰版或专业版(推荐)
推荐配置:
电脑:
台式电脑
处理器:
英特尔
主板:
微星P55-SD50(MS-7586)
芯片组:
英特尔CoreProcessorDMI-P55Express芯片组
内存:
4GB(金士顿DDR31333MHz)
主硬盘:
500GB(西数WDCWD5000AAKS-00V1A0)
主显卡:
512MB(NvidiaGeForceGT240)
显示器:
19英寸宽屏(1440x900)液晶显示器
硬件连接
如图3-1所示,是三维扫描仪与自动化机械臂连接的连线图。
3-1线路连接
系统驱动和软件安装
硬件接线完成后,打开计算机和三维扫描仪电源,放入安装光盘。
并按照以下顺序安装。
运行时库安装
打开光盘“运行时库”文件夹,双击“”文件,根据软件安装步骤提示进行操作,直到安装完成。
如图3-2
图3-2运行时库安装界面
相机驱动安装
打开光盘“basler相机驱动”文件夹,双击“”文件(32位程序则打开Baslerpylonx86),根据软件安装步骤提示进行操作,直到安装完成。
如图3-3
图3-3Basler相机驱动安装界面
注:
安装完成后启动桌面上pylonIPConfigurator配置每个相机的静态IP,使其与网卡在同一个网段上。
软件安装
将光盘“PowerScan”文件夹复制至目的盘即可。
开机
Client,在最下面勾选十六进制接受框,点击连接按钮,将设备、机器人和软件连接起来。
(注:
在自动化未运行时,需手动连接设备、机器人和软件,防止软件一直检测是否连接而造成卡顿。
自动化运行前需将连接断开,自动化运行时,自动化程序会自行连接设备、机器人和软件。
)
图3-4TCPIP软件界面
标定系统
扫描物体之前,选择菜单“文件->新建工程”或点击图标
,新建一个工程,弹出如图3-5所示窗口,选择新建工程文件夹保存路径。
此文件夹中不仅包含工程的配置,而且还包含扫描时得到的数据。
图3-5新建工程图
标定就是通过建立成像的几何模型并求解模型参数来确定扫描物体表面某点的三维几何位置与其在图像中对应点之间的相互关系的过程。
标定的精度将直接影响系统的扫描精度。
一般遇到以下情况需要进行标定:
①扫描仪初次使用,或长时间放置后使用;
②扫描仪使用过程中发生碰撞,导致相机位置偏移;
③扫描仪在运输过程中发生严重震动;
④扫描过程中发现精度严重下降,如频繁出现拼接错误、拼接失败等现象;
⑤更改扫描范围时对相机进行位置调整;
⑥扫描精度要求较高时,也可通过重新标定获得。
标定操作的流程图如图3-6所示
标定操作的流程图如图3-6所示
图3-6标定流程图
图3-7
标靶参数设置:
设定标定板参数。
标定步骤:
(1)将标定板放置在合适的位置(投影可以全面覆盖),点击“开始标定”;
图3-8
(2)点击“采集图像”采集标定所需的图像,并自动提取标定板图像内的圆心坐标,得到标定相机和投影仪所需的数据;如图3-9。
图3-9
(3)点击“下一步”,将自动预览下一幅图像;
(4)变换标定板的位置,重复步骤
(2)、(3),直至得到13个不同位置下的标定数据;
(5)点击“标定系统”,完成标定。
注:
系统位置和标定板姿态的摆放(共14个姿态)
1)调整标定的一个最佳距离(两个激光点重合),把标定板正对投影仪,作为标定第一幅图像的位置;如图3-10。
图3-10
2)把系统在第一幅的位置上相对于镜头向前移动50mm左右,作为第2幅的位置;如图3-11
图3-11
3)把系统在第二幅的位置上相对于镜头向后移动100mm左右,作为第3幅的位置;如图3-12
图3-12
4)把系统移到第一幅的位置上,把标定板摆正并将D边垫高5CM,作为第4幅的位置;如图3-13
图3-13
5)把标定板旋转180°,将B边垫高5CM作为第5幅的位置;如图3-14
图3-14
6)保持系统在第一幅的位置上,把标定板C边或A边垫高5CM,使标定板正对开启的相机,作为第6幅的位置;如图3-15
图3-15
7)把标定板顺时针旋转90°,正对开启的相机,作为第7幅的位置;如图3-16
图3-16
8)把标定板顺时针旋转90°,正对开启的相机,作为第8幅的位置;如图3-17
图3-17
9)把标定板顺时针旋转90°,正对开启的相机,作为第9幅的位置;如图3-18
图3-18
10)保持系统在第一幅的位置上,将并上下正对开启的相机,作为第10幅的位置;如图3-19
图3-19
11)保持系统在第一幅的位置上,把标定板顺时针旋转90,并上下正对开启的相机,作为第11幅的位置;如图3-20
图3-20
12)保持系统在第一幅的位置上,把标定板顺时针旋转180°并上下正对开启的相机,作为第12幅的位置;如图3-21
图3-21
13)保持系统在第一幅的位置上,把标定板顺时针旋转270°,并上下正对开启的相机,作为第13幅的位置;如图3-22
图3-22
14)在投影可见范围内,随意摆放一个位置作为精度标准,并确定能提取出标定板上所有的圆心,作为第14幅的位置;如图3-23
图3-23
15)点击“标定系统”完成标定过程,点击“精度评定”得到标定结果如图3-24。
图3-24
点击“标定系统”完成标定过程,点击“精度评定”得到标定结果。
如果标定结果符合要求(最大误差在±以内),点击“结束标定”完成标定;如果标定结果不符合要求,点击“结束标定”,然后重新开始标定。
机械手操作
系统安装
安装步骤:
1.解压安装包;
2.进入安装界面;
3.选择语言为中文;
4.选择安装产品;
5.首先安装robotware;
6.点击下一步;
7.点击下一步;
8.在选择安装路径时把C改成D;
9.安装robot完成后安装robotstudio回到初始界面;
10.安装robotstudio;
11.点击下一步;
12.下一步;
13.将路径C改成D;
位系统出现两个图标,可以正常使用;
位系统只出现一个图标,也可以正常使用;
16.打开软件,点击选项;
17.点击授权;
18.查看软件使用到期时间;
19.在开始下输入regedit回车;
20.进入注册表编辑器;
位和64位系统注册表文件路径不同(以64位为例);
位打开方式;
23.双击打开后进入编辑;
转台手动操作
Client,勾选十六进制接收框,单击连接按钮连接和转台,具体界面如图3-25所示。
图3-25转台连接界面
在发送框中输入“ENA;”,点击发送,启动转台。
再输入“SPD10000;STP0;”,点击发送,设置转台的速度和位移信息。
移动转台命令为“QEC”+转台位置所在的脉冲数,如输入“QEC100000”转台将移动到100000脉冲数的位置。
路径规划
1.通过手动操作移动机器人至合适位置;
2.通过TCP发送QEC命令调整转台位置(使用转台视情况而定);
3.在PowerScan软件中调整亮度至合适;
4.扫描工件得到测量数据;
5.在示教器上保存该位置点的数据;
6.将此位置的位置点名称及对应的亮度值、扫描数据、转台位置编号记录下来;
重复步骤1~6直至将零件扫全。
注意:
记录的位置与扫描的数据需一一对应,如第一个位置对应第一个数据,第十个位置对应第十个数据,否则自动化运行时会出错。
修改自动化程序代码
将控制柜上的模式选择大道自动模式。
打开RobotStudio软件,在控制器选项卡下单击添加控制器按钮,将机器人控制器添加进软件中,在如图3-26右侧窗口中右击RAPID刷新,点开其中的Main_Module,显示出自动化的运行代码。
图3-26
单击获取写权限按钮,获得在计算机上修改代码的权限。
在代码修改位置和亮度处分别修改记录的对应的目标点名称、亮度值和转台参数,如图3-27所示。
图3-27
SocketSendsocket1\Str:
="LEDCurrent=070";是投影仪亮度控制代码,数值为亮度值,将其修改为记录的相应的亮度值即可,需一直是三位数,不足前面补0。
SocketSendsocket2\Str:
="QEC0;";是转台控制代码,QEC后数字为转台的位置参数,将其修改为记录的相应的转台参即可。
MoveJtx10,v100,fine,tool0\WObj:
=wobj0;是机器人运动代码,记录了下一个点、运动速度等信息,将其修改为记录的相应的点名称即可。
修改完代码后,单击检查程序按钮,检查代码的问题。
在单击应用按钮确认修改。
如3-28所示
图3-28
自动化运行
在确认好程序没有任何问题之后,即可进入自动化运行阶段。
1.确认档位开关已转到自动化挡,若无,请调至自动化挡;
2.确认电机已加电,即点击上电按钮灯常亮;
3.打开TCP界面,分别断开与机器人和转台的连接;
4.在示教器的程序界面点击“PP移动至Main”,并确认操作;
5.按下示教器右下方的三角形按键运行自动化程序,如图3-29所示;
图3-29
6.打开PowerScan软件,进入自动化选项栏,勾选读取矩阵复选框,单击自动测量按钮启动自动测量过程。
注:
关闭仪器前,现在PowerScan软件自动化选项栏中勾选自动关闭复选框,再关闭电脑和控制柜开关。
软件操作
采集点云数据
详见指导书扫描仪使用。
导入扫描数据
选中所需文件
数据处理
联合点对象
数据分析
点击鼠标右键,将扫描数据设置为参考
1)导入检测参考对象CAD数据
2)最佳拟合对齐
3)3D比较
4)3D注释
5)2D比较
6)2D注释
7)2D尺寸截取
8)选取所需检测尺寸的数据
出具报告
运行自动化
将第一份扫描数据检测完后,操作步骤已记录在参考文件中,对于同类零件检测可使用自动化检测。
检测数据上点击右键,点击替换,找到下一个待检零件扫描数据。
点击测试对象,在运行自动化中选择运行自动化,检测步骤自动运行。
删除点云和对比结果,只保留参考对象,此时自动化中保存了所所有检测步骤,保存,为下一步录制宏所用。
录制宏
录制操作步骤,待下次扫描后,直接运行宏,即可实现点云自动化处理,自动生成分析报告。
注意数据保存和打开的路径要保持不变。
点击自动化中的记录
选取点云数据
打开刚保存的点云对象
打开步骤中保存的参考对象
点击停止后,即可看到运行下拉选项中录制的宏2,下次扫描后,点击运行宏即可开始处理程序。
四注意事项
使用注意事项
1.先开控制箱电源,再启动扫描软件。
2.将工作台上的杂物清理干净。
3.光照环境不好时物件易产生光照误差,请使用稳定光源。
4.扫描物件时,请勿触碰物件,否则影响扫描效果。
5.关机时,先关闭扫描软件,再关闭控制箱。
设备注意事项
1.对于三维扫描仪使用运行环境,切记要保证洁净少尘状态。
只有务必保证扫描仪的放置运行环境干净,才能使得设备的性能以及内部元件不会收到损坏。
2.针对扫描仪的日常清洁,切记不要使用有机溶剂来进行清洁保养,这样不仅容易损坏扫描仪的内部元件,还可能导致外壳收到腐蚀以及损耗等现象。
3.定期针对三维扫描仪的相关驱动程序进行检查,并且做到及时的更新。
要知道这样的驱动程序,不仅可以直接影响扫描仪的工作性能,更加涉及到了不同软件和硬件的系统兼容性。
想要让三维扫描仪保持在最佳的状态,就需要定期到相关生产厂家给予的地址中,进行下载更新最新的驱动程序。
4.自动化设备由机器人控制柜总开关控制机器人和扫描仪的通电,在关闭控制柜电源开关前,需在PowerScan软件中勾选关闭设备选项,在关闭扫描软件,最后在关闭控制柜电源开关。
安全警告
1.严禁擅自拆开机箱,防止触电或损坏设备。
2.严禁擅自拆开工业传感器及镜头,防止元件损坏。
3.严禁带点拔插电源。
常见问题
问:
为什么三维扫描仪拍摄得到的点云会出现周期性条纹?
答:
出现这种情况有两个原因:
一种可能是周围环境光场不稳定,存在频闪光源(如荧光灯等光源),应将光源移除,建议采用使用说明中机器布置方式;
另一种可能是周围环境存在震动源(如震动较大的机器等),应远离震动源,保持环境安静。
问:
为什么在镜头中可以看见物体,而拍摄得到的点云却有大量缺失?
答:
拍摄的样品没有处于标定的工作范围内,应将样品位置通过投影出来的竖直亮线按照软件使用说明进行调整。
问:
为什么在镜头中可以看见物体,而经过拍摄之后却没有获得点云?
答:
在不是上一原因引起本问题的前提下,由于采用的投影系统本身的原因,有可能会出现该情况。
可将三维扫描仪断电后再次启动,即可解决该问题。
问:
为什么在还未开始拍摄时,镜头中的图像突然停滞?
答:
可能是内存没有完全释放,图像传输在相机与计算机之间形成了堵塞。
可以将USB信号线重新连接,重启机器,如果还未解决,则再重启电脑。
问:
为什么拍摄的精度突然降低了?
答:
应该是在使用的过程中不小心发生了较大的碰撞,请将系统做一次标定。
问:
为什么在打开powerscan软件后提示“硬件连接错误请与开发商联系”?
答:
说明软件还未检测到相机,注意在打开软件前,应先打开三维扫描仪电源,仍有如上提示,请按以下步骤操作
→
→
→
→
→重新打开软件→修改IP即可
注意:
如您在使用本手册时遇到任何疑问,均可直接联系本公司售后服务人员。
 升级会员
升级会员 