空三导入说明.docx
《空三导入说明.docx》由会员分享,可在线阅读,更多相关《空三导入说明.docx(39页珍藏版)》请在冰豆网上搜索。
空三导入说明
JX4空三导入:
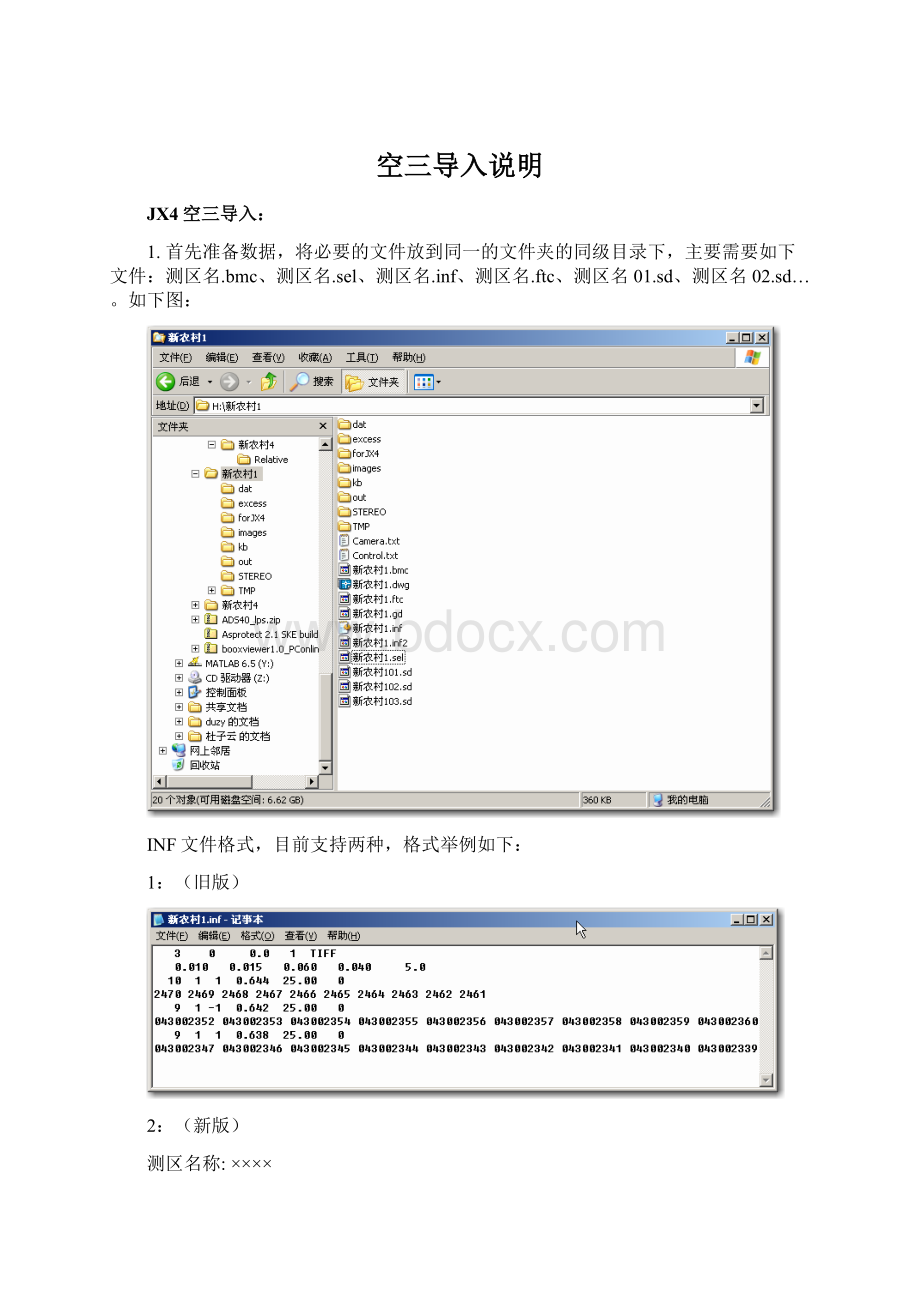
1.首先准备数据,将必要的文件放到同一的文件夹的同级目录下,主要需要如下文件:
测区名.bmc、测区名.sel、测区名.inf、测区名.ftc、测区名01.sd、测区名02.sd…。
如下图:
INF文件格式,目前支持两种,格式举例如下:
1:
(旧版)
2:
(新版)
测区名称:
××××
作业单位名称:
××××
测区航线数:
37
影像扫描分辨率(mm):
0.0250000
影像文件格式:
TIFF
像片边缘扩展常数(mm):
0.00000
摄站GPS坐标标志:
4
自动点点位分布间隔(mm):
5.00000
测区航线排列顺序:
2
上下视差限差(mm):
0.01500
模型连接平面限差(mm):
0.10000
模型连接高程限差系数:
0.04000
最大允许高程值(m):
8800.0
最小允许高程值(m):
0.0
**********************************************************
第1航线像片数:
31
第1航线摄影机序号:
1
第1航线飞行方向标志:
1
第1航线地形标志:
0
第1航线概略重叠度:
0.62958
第1航线摄影比例尺(千):
32.00000
032501396032501397032501398032501399...(像片号)
Bmc文件记录了加密点信息
22300
_190F3479586.229633403.54949.002
_190D3480175.404634510.37250.159
_189A3479715.357634941.84049.081
Sd文件记录了像点
152.058105.9961
2009190
_190F7.8075-86.2302
_190D-3.841061.2568
_189A68.136987.6064
Ftc文件记录了相机参数
0.0000152.05800.0206
-105.998106.000
106.000105.999
106.006-106.001
-106.004-106.001
-0.0020.009
0.000000e+0000.000000e+0000.000000e+0000.000000e+000
SEL文件同样也有规范要求,相邻数字之间必须以空格隔开,正确格式举例如下:
通常可能会出现如下错误格式(遇到片名与第一个转角间没有空格隔开,导致引入出错,遇此情况,请手工修改此文件,将该区域隔开):
2.运行MapMatrix软件,在工程区域选择右键菜单“加载JX4工程”,如下图:
然后选择相应的INF文件,即可完成JX4工程的加载,如下图:
加载完成后,在工程浏览区域,即出现如下内容:
3.开始关联影像,具体操作如下:
在影像节点选择右键菜单关联影像
在弹出的对话框中选中所有的影像,然后点击按钮
,出现如下界面
选择查找影像按钮,弹出如下对话框,选择影像路径
选定路径后确认,得到如下信息:
选择自动关联按钮,即得到如下结果(若不能自动关联,可分别在“待关联影像ID”栏及“待关联影像名”栏中选定,然后点击按钮
,即可关联影像):
4.关联完成后,选择影像节点,在右方的属性栏中输入正确的影像扫描分辨率
5.重做内定向,选择影像节点,右键菜单选择内定向,即完成自动内定向,相关操作见手册。
6.完成内定向后,即可创建立体模型。
VirtuoZo空三导入:
1.首先准备数据,在VirtuoZo系统中使用恢复测区功能将相关文件的路径设定正确,如果使用恢复测区功能未能完全将路径设定正确,需要手工检查文件路径设定是否正确,主要包含如下文件:
测区名.dat、测区名.img、测区名.idx、测区名.blk。
2.设定完成后,在VirtuoZo中打开该测区,选择“创建立体模型”菜单,完成立体模型的创建:
3.在VirtuoZo中创建立体模型成功后,即可使用MapMatrix的导入功能了。
注意:
请使用VirtuoZo3.5或早期的版本创建立体模型,自3.5以后的版本后,VirtuoZo创建立体模型时,生成的影像下的aop文件有误,不可使用,仅模型下的aop文件是正确的,由于MapMatrix使用影像下的aop文件,因此,若使用较新的版本可能导致MapMatrix得到错误的外方位元素。
4.启动MapMatrix软件,在工程区域选择右键菜单“加载VirtuoZo”,选择相应的“测区名.blk”文件或者“测区名.dat”文件即可完成VirtuoZo工程的自动加载
5.加载后工程如下:
支持的VirtuoZo文件类型有两种,一种是测区文件*.blk,一种是测区参数文件*.dat。
*.blk,*.dat测区文件(两者必须存在任意一个)
*.iop内定向文件(与影像文件放在一起,必须存在)
*.aop绝对定向文件(与影像文件放在一起,必须存在)
*.mdl,*.ste模型文件(没有则不加载)
*pcf模型像点文件(没有则不加载)
*.plf模型核线信息(没有则不加载)
*.rop模型定向信息(没有则不加载)
*.lei,*.rei,*.lep,*.rep模型核线,核线参数(没有则不加载)
*.otp正射影像参数文件(没有则不加载)
*.dtpDEM参数文件(没有则不加载)
*.img影像列表文件(没有则不加载)
首先在测区目录寻找VirtuoZo模型,加载它们,包括它们的DEM,DOM。
然后寻找影像列表文件*.img,加载影像;如果没有img文件,那么视图通过模型记录的信息加载影像。
加载完成后,可参考手册后续操作处理。
PATB结果导入:
需要将如下文件放在同一目录下,另保持文件名前缀一致:
*.ori影像ID,外方位元素(必须)
*.adj加密点文件(没有则不加载)
*.im像点文件(没有则不加载)
Ori外方位元素,记录了线元素和旋转矩阵,支持两种格式:
1.
3767303.542000002570576.784355720956.665441258.27690
0.999441194694-0.030214370205-0.0142965094540.0303541964590.999492460657
0.0096666357230.013997182103-0.0100951930130.999851071896
2.
5830.0000000080684.5416350396.78085587.42288
-0.9988407894990.043602185578-0.020394279710-0.043905729225-0.998927810683
0.014680462702-0.0197323129220.0155588706790.9996842288290.006670.014110.004340.1280.0730.094
Adj控制点文件,支持两种格式:
1.
1200283098.49296650132.7262929.7038704
1200387943.01908150071.34825551.5501714
2300384623.09129949580.35317773.6751464
2.
1012570962.62285721347.29373045.8739000.0010.0010.004
1022570959.47845721348.51053045.9848300.0020.0020.004
1032571308.46875721328.00806043.5308900.0010.0010.004
1042571313.38615721324.39623043.7257200.0010.0020.005
Im像点文件,支持两种格式:
1.
583152131.0000
583053-11931.474-31861.1170
583055-599.307-28289.3030
583056-5004.196-30478.3860
58307114754.261-6751.6800
-99
2.
583152131.000
583053-11931.474-31861.117
583055-599.307-28289.303
583056-5004.196-30478.386
58307114754.261-6751.680
-99
可选择加载PATB,在弹出的对话框中选择相关文件*.ori,即可加载,由于ori文件仅包含外方位元素信息,加载完成后,需要关联影像文件,重新设定航带信息:
重划分航带,影像重排,设定扫描分辨率等
新建航带
鼠标托拽影像到另一航带完成后结果
重排顺序排列后结果
影像节点选择右键菜单关联影像
在弹出的对话框中选中所有的影像,然后点击按钮
,出现如下界面
选择查找影像按钮,弹出如下对话框,选择影像路径
选定路径后确认,得到如下信息:
选择自动关联按钮,即得到如下结果(若不能自动关联,可分别在“待关联影像ID”栏及“待关联影像名”栏中选定,然后点击按钮
,即可关联影像):
关联完成后,选择影像节点,在右方的属性栏中输入正确的影像扫描分辨率
ZI空三导入:
ZI输出的数据可能没有后缀,加载程序在给定的目录下搜索匹配的文件(注意要将以下文件放在同一目录中):
Project工程文件,记录了一些参数(必须)
Photo影像参数文件,记录影像定向信息,像点信息(必须)
Control控制点文件(必须)
Camera相机文件(必须)
目前支持的文件格式如下:
Project文件
beginproject_parametersSU86-96
file_type:
ascii
flying_height:
1200
average_elev_grnd:
30
earth_radius:
6378000
atmospheric_flag:
off
under_water_ref:
off
ref_index_water:
1.34
chart_datum_above_control:
0
curvature_flag:
off
linear_units:
meters
angular_units:
degrees
std_dev_meas:
6
Control控制点文件
begincontrol_pointssx=0.1sy=0.1sz=0.1pc=XYZpt=CONTROL
290012073736797.6737443599383.9018464.626754/sx=0.0557584074378026/sy=0.07179136438319027/sz=0.08624384035976135/pc=XYZ/pt=CONTROL/desc=-Densified
290012088736762.31204800013599348.1190715.556857/sx=0.05734980383575867/sy=0.07410802925459561/sz=0.08773254812211942/pc=XYZ/pt=CONTROL/desc=-Densified
290010980736429.1856653599335.9357166.97467/sx=0.08140024569987489/sy=0.1057780695607554/sz=0.1513142425550219/pc=XYZ/pt=CONTROL/desc=-Densified
endcontrol_points
Camera相机参数
begincamera_parametersvexcel
focal_length:
105.2
ppac:
-0.270
ppbs:
00
film_format:
67.5103.5
lens_distortion_flag:
off
io_required:
yes
camera_type:
frame
media_type:
digital
pixel_size:
99
image_size_in_pixels:
750011500
scanline_orientation:
4
photo_coord_sys_orientation:
1
photo_coord_sys_origin:
37505750
focal_length_calibration_flag:
off
calibrated_focal_length_stddev:
0.03
ppac_calibration_flag:
off
calibrated_ppac_stddevs:
0.0030.003
self_calibration_enabled_params:
0
antenna_offsets:
000
endcamera_parameters
Photo文件,文件中可能记录两类信息,影像信息和像点
像点:
beginphoto_measurements1_2317strip_id1version2.0
10340335-12.978815-45.927078-12.978815-45.927078185
10340509-11.495853-28.550691-11.495853-28.550691185
10340565-11.691913-38.664854-11.691913-38.664854185
10339582-32.882727-42.027377-32.882727-42.027377185
10339835-31.519819-15.733252-31.519819-15.733252185
endphoto_measurements
影像信息
beginphoto_parameters2_2374strip_id2
camera_name:
vexcel
camera_orientation:
1
image_id:
D:
\OSGBSB.1167\Images\UC37-060612_2374.jpg
GPS_TimeStamp:
136666.510592
view_geometry:
nadir
EO_parameters:
488728.3674706245168235.51586725782577.9301388838160.86905564362063940.3776591385137687-178.8092870323141
GIVEN_parameters:
488728.3674706245168235.51586725782577.9301388838160.86905564362063940.3776591385137687-178.8092870323141
GIVEN_std_devs:
0.001352853677050890.0030179470440530270.0021813372902287860.0039161288245373830.0017992470688865030.001123096347484448
footprint:
489502.754376169544.187081489554.844559167038.265513487920.391978167004.133420487868.301796169510.054988
DRIVE_type:
collinearity
image_size:
750011500
sensor_id:
-1
endphoto_parameters
加载前先将所有必须的SSK加密成果文件拷贝到一个目录中,见下图
将需要处理的影像放到一个文件夹中,见下图:
然后运行MapMatrix软件,在工程浏览窗口中选择右键菜单“加载Z/IImaging”,见下图:
再弹出的对话框中选择SSK加密成果的目录,找到project文件,见下图:
选中此文件打开,弹出如下对话框:
设定原始影像的路径,指定扫描分辨率,如果是DMC相机则指定扫描分辨率为0.012,并在“数码量测相机内定向”的选项前打勾,见下图:
设定完成后,选择“OK”按钮,即可完成SSK加密成果的导入,导入后弹出如下对话框:
可在此根据需要再删减相关不需要的数据,删减完成后,选择“确定”即弹出如下对话框:
选择“是”,则程序会自动根据导入的结果反算像方误差,如果误差值很小(一般最多几个像素误差),则确定导入结果正确。
选择“否”,则不作此检查;下图为导入后的结果:
LeicaHelava空三导入:
这里加载的是Helava输出的报告文件*.rep
*.rep报告文件(必须)
*.cam相机文件(必须)
*.ipf像点文件(必须)
*.rep文件中记录了工程的大部分信息,包括控制点,影像外方位元素等。
Rep文件的格式有很多种。
支持的几种如下:
1.使用PARAMETERADJUSTMENTSREPORT标记的
PARAMETERADJUSTMENTSREPORT
ImageID,ParameterOriginalOriginalDeltaAdjustedAdjusted
GroundPtNameValueSigmaValueValueSigma
----------------------------------------------------------------------------------------------
39_807CameraXM,Ft558269.912447.53001.326e-04558269.91nosigma
CameraYM,Ft4481860.452447.53008.768e-044481860.45nosigma
CameraZM,Ft3155.102447.53001.562e-043155.10nosigma
OmegaDeg1.651.9382-2.650e-051.6nosigma
PhiDeg-0.251.93824.179e-06-0.2nosigma
KappaDeg60.351.9382-2.846e-0660.3nosigma
P3901x(XYZCntrl)556567.8500.1000.032556567.882nosigma
y4480886.6500.1000.0664480886.716nosigma
z1483.3600.100-0.0201483.340nosigma
2.使用SENSORPARAMETERS的,这个也分为两种:
i.
SENSORPARAMETERS
ImageID,ParameterOriginalOriginalResidualAdjustedAdjusted
GroundPtNameValueSigmaValueValueSigma
----------------------------------------------------------------------------------------------
704_1613
ADJUSTEDPARAMETERS
CameraXM,Ft511404.4010000.000-0.0131930511404.38nosigma
CameraYM,Ft320317.6310000.0000.0030033320317.63nosigma
CameraZM,Ft1678.1510000.0000.00819441678.16nosigma
OmegaDeg-0.0790.000-0.0000542-0.07nosigma
PhiDeg0.2490.000-0.00039730.24nosigma
KappaDeg2.3690.0000.00002602.36nosigma
UNADJUSTEDPARAMETERS
IOa0P4.72nosigmaN/AN/Anosigma
IOa1P/MM-0.05nosigmaN/AN/Anosigma
IOa2P/MM-47.61nosigmaN/AN/Anosigma
IOb0P-9.98nosigmaN/AN/Anosigma
IOb1P/MM47.61nosigmaN/AN/Anosigma
IOb2P/MM-0.05nosigmaN/AN/Anosigma
OFFXM,Ft0.00nosigmaN/AN/Anosigma
OFFYM,Ft0.00nosigmaN/AN/Anosigma
OFFZM,Ft0.00nosigmaN/AN/Anosigma
OFFXM,Ft/S0.00nosigmaN/AN/Anosigma
OFFYM,Ft/S0.00nosigmaN/AN/Anosigma
OFFZM,Ft/S0.00nosigmaN/AN/Anosigma
ii.
SENSORPARAMETERS
ImageID,ParameterOriginalOriginalResidualAdjustedAdjusted
GroundPtNameValueSigmaValueValueSigma
-----------------------------
 升级会员
升级会员 