嘴棒库物流电控设备简单操作与故障处理.docx
《嘴棒库物流电控设备简单操作与故障处理.docx》由会员分享,可在线阅读,更多相关《嘴棒库物流电控设备简单操作与故障处理.docx(145页珍藏版)》请在冰豆网上搜索。
嘴棒库物流电控设备简单操作与故障处理
嘴棒库物流电控设备简单操作与故障处理
嘴棒库物流电控设备包括皮带机输送设备,堆垛机以及调度系统三大块。
下面分三大部分进行介绍:
一、皮带机输送设备
1、输送机结构介绍
图
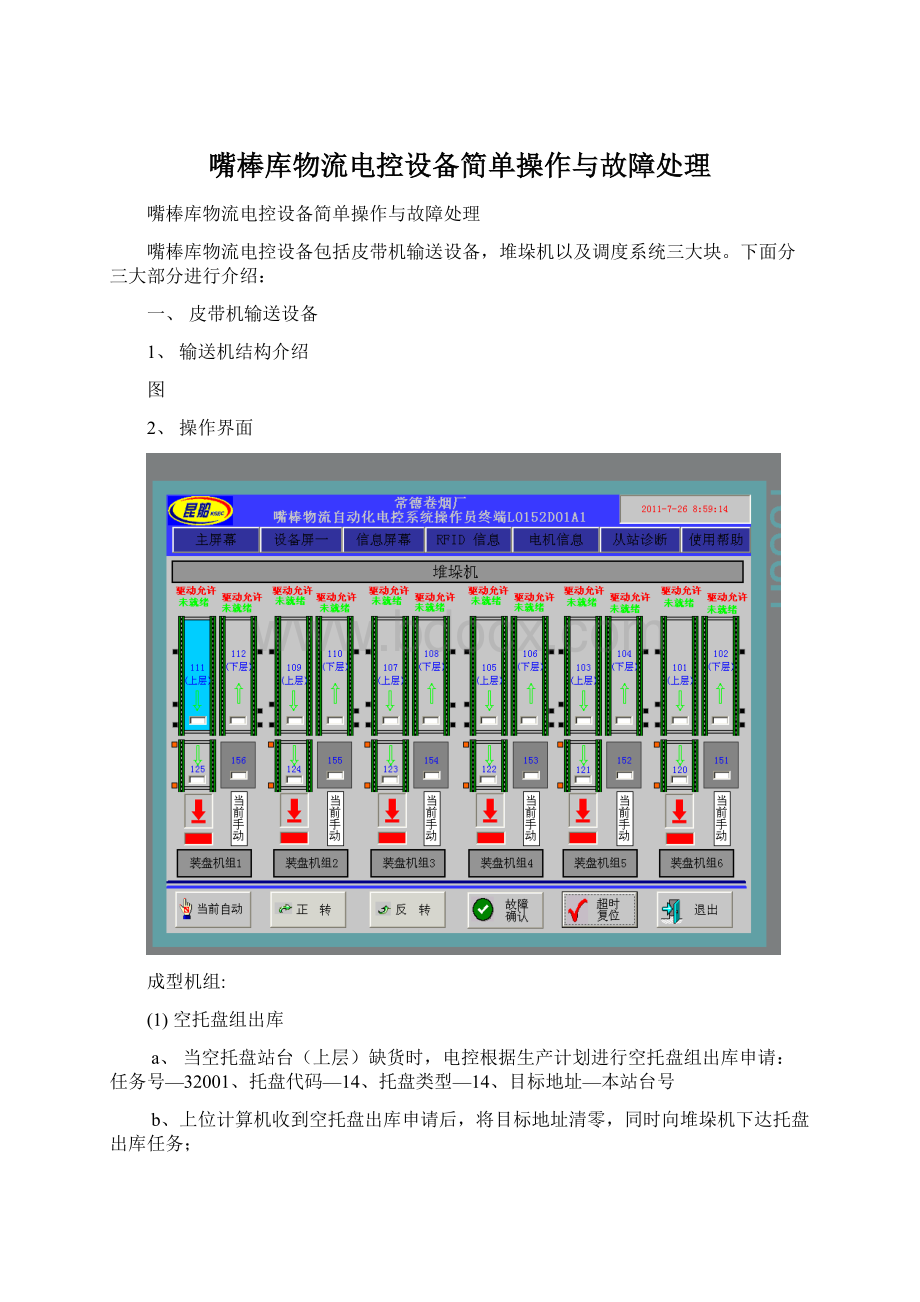
2、操作界面
成型机组:
(1)空托盘组出库
a、当空托盘站台(上层)缺货时,电控根据生产计划进行空托盘组出库申请:
任务号—32001、托盘代码—14、托盘类型—14、目标地址—本站台号
b、上位计算机收到空托盘出库申请后,将目标地址清零,同时向堆垛机下达托盘出库任务;
c、堆垛机取货到达出库站台。
在确认收到站台发送的站台就绪信号后,开始伸叉放货,同时给站台停止信号。
放货完成后,取消停止信号
d、上位调度计算机收到堆剁机放货完成反馈信息后,将任务重新下到出库实站台(任务号1—30000)。
e、提升移位机收到装盘机要盘信号后,向装盘机送盘,送盘期间给装盘机发送运行信号)
f、当站台不被占用(站台3号光电管无信号),清实站台信息。
同时生成新出库任务;
(2)实托盘组入库
a、当实托盘到达入库站台电子标签读写器后停止,在读写成功后继续运行,同时任务记数加1(读写错误则报错停止)。
b、记数够,生成入库任务申请:
任务号—32001、托盘代码—虚站台任务号、托盘类型—14、目标地址—本站台号;同时清缓存区。
此时止盘器将禁止下一批实托盘进入。
c、上位计算机收到任务申请,将目标地址清零,同时向堆垛机下达入库任务,堆垛机取货完成后,由上位计算机将入库站台信息清除。
发射机组:
(1)实托盘组出库
a、当实托盘站台(上层)缺货时,电控根据生产计划进行实托盘组出库申请:
任务号—32001、托盘代码—虚站台任务号、托盘类型—14、目标地址—本站台号;
b、上位计算机收到实托盘出库申请后,将目标地址清零,同时向堆垛机下达托盘出库任务;
c、堆垛机取货到达出库站台。
在确认收到站台发送的站台就绪信号后,开始伸叉放货,同时给站台停止信号。
放货完成后,取消停止信号;
d、上位调度计算机收到堆剁机放货完成反馈信息后,将任务重新下到出库实站台(任务号1—30000)。
e、RFID读写托盘组信息,验证无误后允许运行,否则报错。
f、当站台不被占用(站台3号光电管无信号),清实站台信息。
同时生成新出库任务;
(2)空托盘组入库
a、当实托盘到达入库站台(入库站台1号光电管有信号,且无入库任务),站台开始运行,当托盘经过2号光电管且止盘器运行正常时,计数加1,允许下一托盘进入。
b、记数够,生成入库任务申请,同时清缓存区。
此时止盘器将禁止下一批实托盘进入。
c、上位收到任务申请,调度堆垛机取货,堆垛机取货完成后,由上位将入库站台信息清除。
3、基本故障处理
1、隔离开关等常规故障将隔离开关合上后自动复位
2、启动器故障需通过“故障确认”按钮复位(若仍无法复位则需要对启动器24VDC断电重启)
3、超时故障可通过输送机“启动按钮”或操作员终端超时复位按钮恢复。
4、RFID读写超时故障需先按“故障确认”将读写器初始化。
然后选中故障站台的RFID,持续按住RFID界面中的“故障确认”按钮5秒,故障报警消除后,将读写错误的托盘移至RFID读写头处重新读写。
二、堆垛机
1、堆垛机主要结构与工作原理
(1)主要结构
KSEC&ROBO_SRMD型巷道式堆垛起重机主要由底架、立柱、升降台、货叉机构、走行驱动系统、升降驱动系统、货叉驱动系统、轨道系统、安全装置部件组成
(2)走行系统
走行系统由安装在主动走行轮轴上带制动器减速电机驱动,走行驱动电机装有一个旋转编码器,为电控系统控制走行速度提供电机转速反馈,利于精确控制电机转速,从而达到精确控制走行速度的目的。
走行位置检测装置主要是激光测距(或编码器),用于反馈堆垛机实际走行位置;辅助定位校验使用认址片检测光电开关。
堆垛机走行时,电控系统依据激光测距器测出巷道式堆垛起重机当前的位置(编码值)和目标位置(编码值)进行计算,计算出走行速度曲线控制走行电机的转速,实现电控系统对走行电机的启、停、速度及制动定位的控制。
(3)升降系统
升降系统由安装在立柱上带制动器减速电机驱动同步带拉动升降台升降运行,升降驱动电机装有一个旋转编码器,为电控系统控制升降速度提供电机转速反馈,利于精确控制电机转速,从而达到精确控制升降速度的目的。
升降位置检测装置主要是激光测距(或编码器),用于反馈堆垛机升降台实际升降位置;辅助定位校验使用认址片检测光电开关。
堆垛机升降时,电控系统依据激光测距器测出巷道式堆垛起重机升降台当前的位置(编码值)和目标位置(编码值)进行计算,计算出升降速度曲线控制升降电机的转速,实现电控系统对升降电机的启、停、速度及制动定位的控制。
(4)货叉系统
货叉系统由安装在货叉叉体上带制动器的减速电机通过连轴器驱动两个叉体同步运行。
货叉位置检测装置主要是编码器,用于反馈货叉实际伸缩位置;辅助定位校验使用接近开关。
货叉运行时,电控系统依据编码器测出货叉当前的位置(编码值)和目标位置(编码值)进行计算,计算出伸叉速度的高低,实现电控系统对伸叉电机的启、停、速度及制动定位的控制。
货物状态监测保护装置可以在货叉运行期间检测货物的状态,当货物状态不符合叉取货物的要求时,货叉将立即制动停止。
货物状态监测保护装置由以下检测开关组成:
a)货格虚实检测:
升降台上的两个漫反射式光电开关用于检测货架货格内是否有货物,防止堆垛机执行存取货任务时与实际货架内有无货的状态不一致。
b)台内有无货物检测:
是通过装在升降台的一组回归反射式光电开关对在升降台上的实托盘进行位置检测,开关触发表示台内有货,反之则没有。
c)货物超长检测:
升降台两侧有两组回归反射式光电开关用于检测进入升降台的货物是否超长,调节光电开关的位置,当进入升降台的托盘或货物超过标准实托盘宽度20mm时应触发,堆垛机报警,并立即停止工作。
d)货物外形检测装置:
:
货物外形检测装置用来检测进入升降台内的货物的宽和高是否超出货物的最大外形尺寸要求,通过有六组回归反射式光电开关来实现,一旦超高或超宽系统将报警并立即停止工作。
(5)工作原理
巷道式堆垛起重机存取货时需由调度系统来管理,调度计算机通过红外通讯器给巷道式堆垛起重机下达任务,巷道式堆垛起重机根据任务到指定的位置存取货物,同时向调度计算机反馈本机状态。
巷道式堆垛起重机获得任务后,首先执行取货任务,根据取货任务的层、列地址译码成走行和升降的目标定位编码值,然后判断巷道式堆垛起重机当前位置(编码值)与目标定位编码值的差值,依据此差值判断巷道式堆垛起重机的运行方向,并计算运行的速度控制变频器驱动走行、升降电机运行;走行、升降运行定位后,货叉进行取货操作。
执行完取货任务后执行放货任务,放货任务的控制过程和运行状态与取货一致,定位后货叉进行放货操作。
2、堆垛机的操作
(1)巷道式堆垛起重机机上操作单元(见图11)
图11机上操作单元
1)机上操作单元——触摸屏:
用于查看堆垛机的运行维护信息、设置堆垛机参数、操作堆垛机。
2)机上操作单元——状态指示灯:
当状态指示灯闪烁时标明堆垛机具备操作条件,可以进行手动和半自动操作;当状态指示灯常亮时,表示堆垛机处于在线状态此时堆垛机有任务或具备接收调度下发任务的条件;当状态指示灯灭时,表示堆垛机不具备操作条件,请检查急停回路状态及故障;
3)机上操作单元——BYPASSOFF\ON钥匙开关:
当发生同步带松弛、X轴/Y轴极限、Y轴超速时,可以将BYPASS钥匙开关置于ON位置并保持,方可操作堆垛机解除以上状态;
4)机上操作单元——AUTO\MANUL钥匙开关:
手操器接口插上辅助插头,当开关置于AUTO位置,堆垛机进入“在线控制”模式(自动模式);当开关置于MANUL位置,堆垛机进入“单机控制”模式(半自动模式);
5)机上操作单元——急停按钮:
如发生紧急事件或者危急人身及设备安全时,应按下红色蘑菇头按钮,使设备停止。
当需要解除紧急状态时,右旋拔出紧急停止按钮复位故障即可;
6)注意:
爬梯侧及操作台上均有急停按钮,图中未标出,功能及操作方法同5)条。
7)机上操作单元——电源开关:
当置于“I”时闭合开关,堆垛机上电;当置于“O”时分断开关,堆垛机断电,对堆垛机进行维修时请注意断电并谨记挂锁;
8)机上操作单元——手操器:
当手操器接口插上手操器时,堆垛机进入“手动控制”模式,此时堆垛机仅能通过手操器手动操作;
9)机上操作单元——报警灯(红色):
当堆垛机出现故障报警时,报警指示灯闪烁,反之熄灭;
10)机上操作单元——报警灯(绿色):
此指示灯含义与2)条中相同,请参照2)条;
11)机上操作单元——报警蜂鸣器:
当堆垛机处在单机或在线控制状态时,系统出现故障报警时,报警蜂鸣器发出声音,提示此台堆垛机处于故障状态。
当系统处于手动状态时,报警蜂鸣器被禁用。
(2)手动操作使用说明(见图12)
图12手操器
1)手操器——X轴后退按钮(REV):
手操器插上,X轴后退按钮+使能按钮按下并保持,堆垛机在X轴后退运行;
2)手操器——X轴前进按钮(FORW):
手操器插上,X轴前进按钮+使能按钮按下并保持,堆垛机在X轴前进运行;
3)手操器——Y轴下降按钮(DOWN):
手操器插上,Y轴下降按钮+使能按钮按下并保持,堆垛机在Y轴下降运行;
4)手操器——Y轴上升按钮(UP):
手操器插上,Y轴上升按钮+使能按钮按下并保持,堆垛机在Y轴上升运行;
5)手操器——Z轴左伸按钮(左OUT):
手操器插上,Z轴左伸按钮+使能按钮按下并保持,堆垛机在Z轴左伸运行;
6)手操器——Z轴右伸按钮(右OUT):
手操器插上,Z轴右伸按钮+使能按钮按下并保持,堆垛机在Z轴右伸运行;
注意:
操作手操器以上按钮时,可以带故障操作(除急停联锁故障)。
7)手操器——定位左取放货按钮(左CYC):
手操器插上,定位左取放货按钮+使能按钮按下并保持,堆垛机根据升降台内有无货物情况在X\Y轴运行定位,然后左伸货叉运行到左伸定位位置,升降台抬起(或放下)货叉叉取(或放下)货物后,货叉回中位,完成取放货的循环动作;
8)手操器——定位右取放货按钮(右CYC):
手操器插上,定位右取放货按钮+使能按钮按下并保持,堆垛机根据升降台内有无货物情况在X\Y轴运行定位,然后右伸货叉运行到右伸定位位置,升降台抬起(或放下)货叉叉取(或放下)货物后,货叉回中位,完成取放货的循环动作;
注意1:
操作左\右取放货按钮时,其Y轴的定位是依据载货台内是否有无货物来决定的,既载货台内有货物时,Y轴定位在放货位置上;载货台内无货时,Y轴定位在取货货位置上;因此要确保载货台内检测货物光电开关检测可靠,否则可能造成Y轴定位错误。
注意2:
操作左\右取放货按钮时,不能有任何故障,有故障时该操作将禁止,且堆垛机停止;另由于该操作是分步进行,每步间有1S的延时,因此也可用左\右取放货按钮来进行X和Y轴的定位。
注意3:
在站台操作左\右取放货按钮时,需进入到站台X\Y位置400mm的范围内方能定位,否则将禁止操作和运行;另当在没有货位的位置操作时,功能将被禁止。
9)手操器——使能按钮:
按下使能按钮并保持,堆垛机进入手动操作允许状态;
注意:
当手动操作需要停止堆垛机时,请释放使能按钮。
10)手操器——手动高速按钮:
当手动操作堆垛机运行后,按下手动高速按钮并保持,堆垛机将按照手动高速速度运行,释放后速度降为手动低速速度;
11)手操器——急停按钮:
如发生紧急事件或者危急人身及设备安全时,应按下红色蘑菇头按钮,使设备停止。
当需要解除紧急状态时,右旋拔出紧急停止按钮复位故障即可。
(2)单机自动操作
单机自动操作时,堆垛机按输入的任务来完成相应的动作,可以分别实现定位运行、取货、放货、取放货的操作,单机自动操作是一个自动运行的过程,因此会对整机、货物及货架的状态进行检测,发现异常报警,报警后立刻停机,直到消除故障后方能运行。
单机操作完全在堆垛机上的触摸屏上来完成操作。
9.6.3.1地址范围
滤棒库堆垛机关联的货架及站台布局如上图所示,其中灰色部分为货架内禁用(或不存在)的货位。
地址
范围
说明
货架列地址
1-36列
输入的货架列地址不在该范围将报警
货架层地址
1-9层
输入的货架层地址不在该范围将报警
货架排地址
1排、2排
输入的货架排地址不在该范围将报警
站台列地址
站台号:
51--70
输入的站台列地址不在该范围将报警
站台层地址
站台号:
51--70
输入的站台层地址不在该范围将报警
站台排地址
站台号:
51--70
输入的站台排地址不在该范围将报警
站台地址输入规则:
51号站台地址表达——————51列51层51排
货位地址输入规则:
1排货架2列3层的货位表达——2列3层1排
注意:
60号和70号站台为同一站台,60号站台为出库站台,70号站台为入库站台
注意:
当输入货架货位地址在图中所示灰色部分的范围时,表明输入地址不正确,将报警停机;
9.6.3.2自动运行任务操作
运行任务:
堆垛机只进行走行和升降的运行及定位,运行过程中堆垛机需要走行、升降,但不伸叉。
注意:
操作前请注意阅读本说明第1部分相关安全的要求和说明
1
Ø选定单机操作模式;
2
Ø点击“任务管理”按钮进入任务管理画面;
Ø输入运行任务的地址;
3
Ø运行任务的地址只包括列地址、层地址,排地址为0;
Ø当运行任务需要到达层定位位置的“取货位”置时,在取货地址内输入列和层的地址;
Ø其余所有地址必须为“0”,如图示;
4
Ø运行任务的地址只包括列地址、层地址,排地址为0;
Ø当运行任务需要到达层定位位置的“放货位”置时,在放货地址内输入列和层的地址;
Ø其余所有地址必须为“0”,如图示;
5
Ø按下地址输入确认按钮并保持1秒钟;
6
Ø返回到自动控制画面,且自动控制画面内地址不是全部为0,表示地址已经成功输入;
Ø任务状态显示为“运行”任务;
Ø运行任务执行步骤只有“跑位”;
Ø注意:
当有故障时或是当前有任务时,如果进入任务管理画面内再添加任务是禁止的。
只有在复位故障后或当前没有任务时才能添加新任务。
Ø注意:
清除当前任务请按下“清除任务“按钮并保持5秒钟,取放货地址显示域内全部显示0表示当前任务被清除。
7
Ø点击启动按钮,堆垛机按照输入的地址运行到位后停止。
8
Ø任务执行完后,取放货地址显示域内全部显示为“0”;
Ø任务状态显示为“空闲”;
9.6.3.3自动取货任务操作
取货任务:
堆垛机只把货物叉取到载货台上的任务,运行过程中堆垛机需要走行、升降、伸叉。
注意:
操作前请注意阅读本说明第1部分相关安全的要求和说明
1
Ø选定单机操作模式;
2
Ø点击“任务管理”按钮进入任务管理画面;
Ø输入取货任务的地址;
3
Ø取货任务的地址只在取货地址内输入列、层、排地址,放货地址内的列、层、排地址全部输入“0”;
4
Ø按下地址输入确认按钮并保持1秒钟;
5
Ø返回到自动控制画面,且自动控制画面内取货地址不为0,表示地址已经成功输入(注意排地址不为0;
Ø任务状态显示为“取货”任务;
Ø取货任务执行步骤由“1跑位”、“2伸叉”、“3微升”、“4收叉”四个步骤组成;
Ø任务执行到第4步收叉时取货任务完成;
Ø注意:
当有故障时或是当前有任务时,如果进入任务管理画面内再添加任务是禁止的。
只有在复位故障后或当前没有任务时才能添加新任务。
Ø注意:
清除当前任务请按下“清除任务“按钮并保持5秒钟,取放货地址显示域内全部显示0表示当前任务被清除。
6
Ø返回自动控制画面;
Ø点击启动按钮,堆垛机运行;
7
Ø堆垛机运行到目标位置叉取货物到载货台内的动作过程堆垛机处于取货状态;
Ø当取货动作执行过程中出现故障时,堆垛机退出取货状态进入故障状态,只有清除故障,重新启动堆垛机后才能进入取货状态;
8
Ø任务执行完后,取放货地址显示域内全部显示为“0”;
Ø且任务状态显示为“空闲”;
注意:
执行取货任务时要确保货架或站台上有货物,且载货台上没有货物,否则堆垛机运行到该位置时将报警停机。
9.6.3.4自动放货任务操作
放货任务:
堆垛机只把货物放置到货架或站台上的任务,运行过程中堆垛机需要走行、升降、伸叉。
注意:
操作前请注意阅读本说明第1部分相关安全的要求和说明
1
Ø选定单机操作模式;
2
Ø点击“任务管理”按钮进入任务管理画面;
Ø输入放货任务的地址;
3
Ø放货任务的地址只在放货地址内输入列、层、排地址,取货地址内的列、层、排地址全部输入“0”;
4
Ø按下地址输入确认按钮并保持1秒钟;
5
Ø返回到自动控制画面,且自动控制画面内放货地址不为0,表示地址已经成功输入(注意排地址不为0);
Ø任务状态显示为“放货”任务;
Ø放货任务执行步骤由“5跑位”、“6伸叉”、“7微降”、“8收叉”四个步骤组成;
Ø任务执行到第8步收叉时放货任务完成;
Ø注意:
当有故障时或是当前有任务时,如果进入任务管理画面内再添加任务是禁止的。
只有在复位故障后或当前没有任务时才能添加新任务。
Ø注意:
清除当前任务请按下“清除任务“按钮并保持5秒钟,取放货地址显示域内全部显示0表示当前任务被清除。
6
Ø返回自动控制画面;
Ø点击启动按钮,堆垛机运行;
7
Ø堆垛机运行到目标位置卸载货物到站台或货架内的动作过程堆垛机处于放货状态;
Ø当放货动作执行过程中出现故障时,堆垛机退出放货状态进入故障状态,只有清除故障,重新启动堆垛机后才能进入放货状态;
8
Ø任务执行完后,取放货地址显示域内全部显示为“0”;
Ø且任务状态显示为“空闲”;
注意:
执行放货任务时要确保载货台上有货物,且要放货的地址没有货物,否则堆垛机运行到该位置时将报警停机。
9.6.3.5自动取\放货任务操作
取\放货任务:
堆垛机从站台或货架上叉取货物放置到货架或站台上的任务,运行过程中堆垛机需要走行、升降、伸叉。
注意:
操作前请注意阅读本说明第1部分相关安全的要求和说明
1
Ø选定单机操作模式;
2
Ø点击“任务管理”按钮进入任务管理画面;
Ø输入取\放货任务的地址;
3
Ø取\放货任务的地址需在取货地址内和放货地址内都要输入列、层、排地址;
4
Ø按下地址输入确认按钮并保持1秒钟;
5
Ø返回到自动控制画面,且自动控制画面内取\放货地址不为0,表示地址已经输入(注意排地址不为0);
Ø任务状态显示为“取\放货”任务;
Ø取\放货任务执行步骤由“1跑位”、“2伸叉”、“3微升”、“4收叉”、“5跑位”、“6伸叉”、“7微降”、“8收叉”八个步骤组成;
Ø任务执行到第4步且货叉回到到中位时取货任务完成,任务执行到第8步且货叉回到到中位放货任务完成,即整个取放\货任务完成;
Ø注意:
当有故障时或是当前有任务时,如果进入任务管理画面内再添加任务是禁止的。
只有在复位故障后或当前没有任务时才能添加新任务。
Ø注意:
清除当前任务请按下“清除任务“按钮并保持5秒钟,取放货地址显示域内全部显示0表示当前任务被清除。
6
Ø返回自动控制画面;
Ø点击启动按钮,堆垛机按照输入的地址运行;
7
Ø堆垛机运行到目标位置叉取货物到载货台内的动作过程堆垛机处于取货状态;
Ø当取货动作执行过程中出现故障时,堆垛机退出取货状态进入故障状态,只有清除故障,重新启动堆垛机后才能进入取货状态;
8
Ø堆垛机运行到目标位置卸载货物到站台或货架内的动作过程堆垛机处于放货状态;
Ø当放货动作执行过程中出现故障时,堆垛机退出放货状态进入故障状态,只有清除故障,重新启动堆垛机后才能进入放货状态;
9
Ø任务执行完后,取\放货地址显示域内全部显示为“0”;
Ø且任务状态显示为“空闲”;
注意:
执行取\放货任务时要确保取货的地址有货物,要放货的地址没有货物,否则堆垛机运行到该位置将报警停机。
(3)在线操作
在线操作是由上位调度计算机下发任务的一种操作模式。
注意:
操作前请注意阅读本说明第1部分相关安全的要求和说明
1
Ø选定在线操作模式;
2
Ø点击启动按钮;
3
Ø点击启动按钮后,堆垛机处于在线状态;
Ø此时绿色报警灯常亮;
Ø表示堆垛机处于可以调度,能够接收上位计算机的指令;
Ø注意:
如果堆垛机处于离线状态,则禁止上位计算机调度;
4
Ø当堆垛机接收到上位计算机的任务时,将在在线控制画面内的取货地址和放货地址显示上位调度计算机下发的任务地址;
Ø同时显示任务号;
ØDU511、DU111堆垛机同时也将显示上位调度计算机下发的任务地址及与其相对应的巷道号;DQ511堆垛机不显示任务对应的巷道号;
注意:
单机自动状态下人工添加的任务没有任务号
5
Ø任务执行完后,取\放货地址显示域内全部显示为“0”,同时任务号也清为“0”;
Ø且任务状态显示为“空闲”;
6
Ø其他查询及操作注意事项与前述的单机自动操作相同;
Ø注意:
调度计算机下发的任务请勿在堆垛机触摸屏上清除,若一定要清除,请经调度计算机操作人员的同意,同时注意货物出入库信息的更新。
7
Ø堆垛机在在线操作模式下同时也支持上位调度计算的对堆垛机操作,相关操作说明请参阅上位调度计算机操作说明;
3、故障处理
(1)故障画面的显示及操作
堆垛机有故障时,在操作画面内(包含“手动控制”、“自动控制”、“在线控制”三个画面)将弹出故障按钮;
点击可进入故障查询画面,进入故障信息画面,可以看到具体的故障信息;
排除故障,按下故障复位按钮复位故障,具体排除故障方法请参阅以下内容。
返回操作画面,此时故障按钮消失,故障排除。
(2)堆垛机故障列表
表6故障列表
故障码
故障名称
详细信息
与走行相关故障
1
走行变频器1断路器-30F1,走行变频器2断路器-35F1故障
见71页
2
走行变频器-30T1或-30T2故障
见71页
3
走行前极限-140B5\\-225B8
见72页
续表6故障列表
故障码
故障名称
详细信息
4
走行后极限-140B5\\-226B1
见72页
5
走行原点(后操作限位)-226B1触发位置错误
见73页
6
走行反原点(前操作限位)-225B8触发位置错误
见73页
7
走行测距器-32B1值无变化
见73页
8
预留
9
走行测距器-32B1值不在设定范围
见74页
10
走行测距器-32B1值变化率超过设定值
见74页
11
走行方向错误
见74页
12
走行认址错误
见75页
13
走行减速错误:
走行减速区域监测(磁性开关)-140B8过磁钉时速度超过限定值
见75页
14
走行抱闸错误:
走行电机1、2制动器控制接触器-30Q6-35Q6状态错误
见76页
15
走行定位超差
见76页
16
预留
17
 升级会员
升级会员 