控制系统仿真实验一报告.docx
《控制系统仿真实验一报告.docx》由会员分享,可在线阅读,更多相关《控制系统仿真实验一报告.docx(11页珍藏版)》请在冰豆网上搜索。
控制系统仿真实验一报告
实验一经典的连续系统仿真建模方法
一实验目的
1.了解和掌握利用仿真技术对控制系统进行分析的原理和步骤。
2.掌握机理分析建模方法。
3.深入理解一阶常微分方程组数值积分解法的原理和程序结构,学习用Matlab编写
数值积分法仿真程序。
4.掌握和理解四阶Runge-Kutta法,加深理解仿真步长与算法稳定性的关系。
二实验内容
1.编写四阶Runge_Kutta公式的计算程序,对非线性模型(3)式进行仿真。
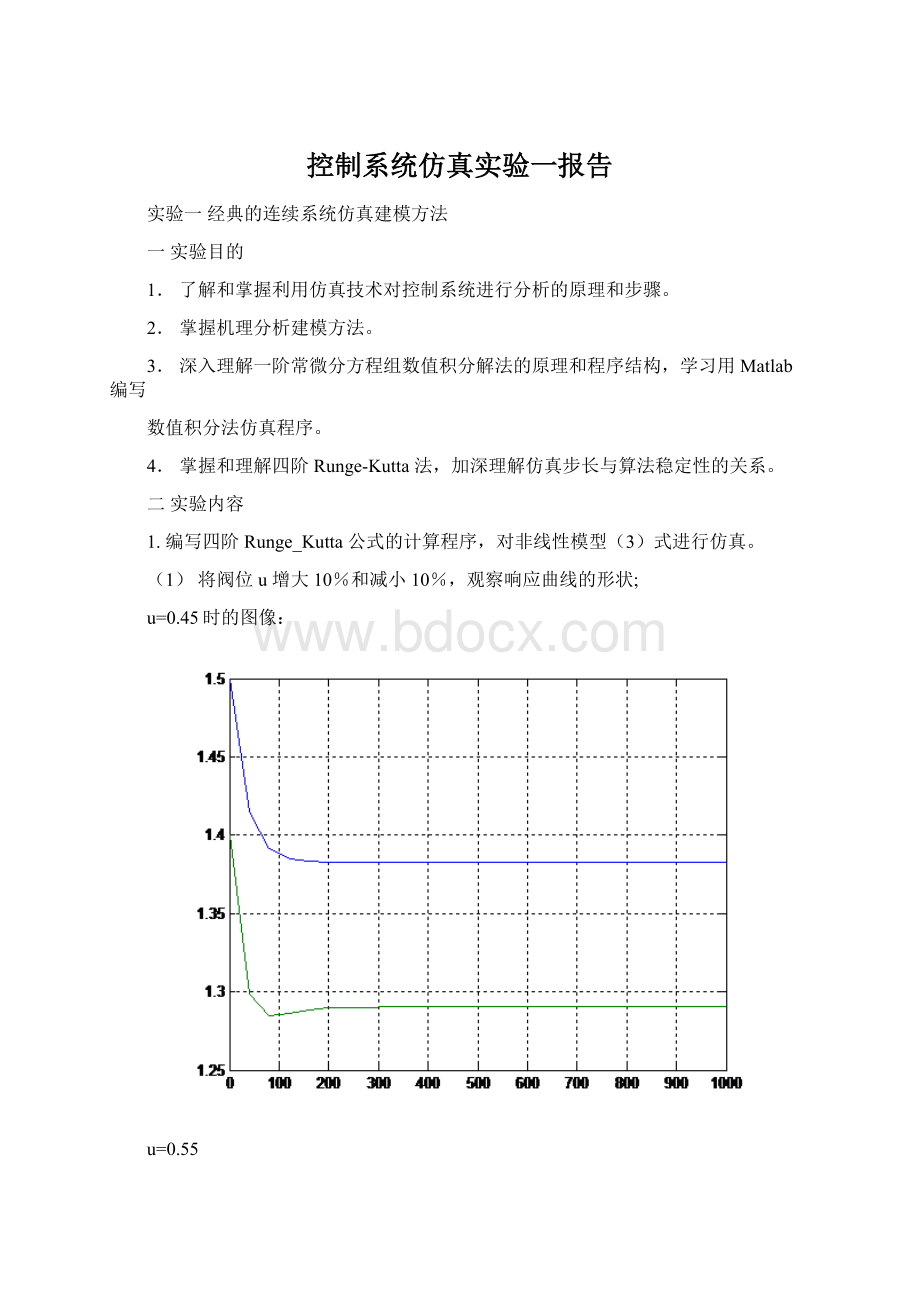
(1)将阀位u增大10%和减小10%,观察响应曲线的形状;
u=0.45时的图像:
u=0.55
开大或关小阀位之后,稳态值会相应的从原液位上升或下降,这是符合实际的。
(2)研究仿真步长对稳定性的影响,仿真步长取多大时RK4算法变得不稳定?
由
(1)可知,当步长为40时,仿真结果是稳定的
当步长为80时的图像
h(1,1)的数值稳定,但是并不是实际求得的稳态值。
h(1,2)的值显然发散。
进一步取小步长,取hstep=42时,图像出现偏差,但是稳态值不变
Hstep=65时,图像偏差明显
而hsetp=65.7时,图像就发散了
(3)利用MATLAB中的ode45()函数进行求解,比较与
(1)中的仿真结果有何区别。
Ode45调用的函数:
function[dh]=daoshu(t,x)
u
(1)=0.4;%此处可以修改阀位
dh=zeros(2,1);
u
(2)=0.15;
A=2;
ku=0.1/0.5;
alpha12=0.25/sqrt(1.5);
alpha2=0.25/sqrt(1.4);
dh(1,1)=(ku*(u
(1))+u
(2)-alpha12*sqrt(x(1,1)))/A;
dh(2,1)=(alpha12*sqrt(x(1,1))-alpha2*sqrt(x(2,1)))/A;
end
在主程序中添加ode45的算法:
[T,Y]=ode45('daoshu',[0,1000],[1.5,1.4]);
figure
(1)
plot(T,Y)
holdon
plot([0:
hStep:
nCounter*hStep]',Hlevel)
grid
将ode45与编写的龙格库塔算法画到同一个坐标系中(点表示ode45):
可以发现,ode45更快达到稳定值,实际上,在缩小了编写算法中的步长后,两种算法的曲线基本重合,说明ode45的精度很高:
2.编写四阶Runge_Kutta公式的计算程序,对线性状态方程(18)式进行
仿真
(1)将阀位增大10%和减小10%,观察响应曲线的形状;
增大10%,令u
(1)=0.05
令u
(1)=-0.05
(2)研究仿真步长对稳定性的影响,仿真步长取多大时RK4算法变得不稳定?
方法同上,大约在hstep=61时就不稳定了
(3)阀位增大10%和减小10%,利用MATLAB中的ode45()函数进行求解阶跃响
减小10%(实线为编写算法,点为龙格库塔法):
增大10%:
程序实现:
调用微分函数:
function[dh]=dx(t,x)
%DX被ode45调用的微分方程函数
u=zeros(2,1);
u
(1)=0.05;%此处可以修改阀位
u
(2)=0;
A=2;
ku=0.1/0.5;
alpha12=0.25/sqrt(1.5);
alpha2=0.25/sqrt(1.4);
R12=2*sqrt(1.5)/alpha12;
R2=2*sqrt(1.4)/alpha2;
AMTRIX=[-1/(A*R12)0;1/(A*R12)-1/(A*R2)];
BMATRIX=[ku/A1/A;00];
dh=AMTRIX*x+BMATRIX*u;
end
主程序中添加:
[T,Y]=ode45('dx',[0,250],[0,0]);
Y(:
1)=Y(:
1)+1.5
Y(:
2)=Y(:
2)+1.4
figure(3)
plot(T,Y,'.')
holdon
plot([0:
hStep:
nCounter*hStep]',Hlevel)
grid
三实验报告
实验完成后,要写出实验报告,内容包括:
1.实验步骤及说明;
2.实验所用的仿真程序清单,以及程序结构的简单说明;
3.实验结果曲线及分析,稳态值是多少;
四思考题
1.讨论仿真步长对稳定性和仿真精度的影响。
一般来说,仿真步长越长,系统越倾向于不稳定,仿真步长越短,系统越稳定,但是需要的仿真时间越长。
2.你是怎样实现阀位增大和减小10%的?
对于非线性模型和线性模型方法一样吗?
线性模型与非线性模型实际改变方式不一样。
线性模型中,由于采用的是增量化的方程,所以在修改时只需要修改增量,即0.05或-0.05。
非线性模型中,采用的绝对量的方程,所以在修改时应该修改绝对量,即改为0.45或0.55。
五实验总结
通过本次实验,熟悉了对matlab软件的使用,加深了对微分方程数值积分解法的理解,并通过编写程序进一步加深认识。
通过对系统微分方程的列写,加深了对控制系统的认识,同时对非线性系统的线性化有了更深的了解(增量化方程)。
 升级会员
升级会员 