马铃薯收获机振动部件运动学分析报告.docx
《马铃薯收获机振动部件运动学分析报告.docx》由会员分享,可在线阅读,更多相关《马铃薯收获机振动部件运动学分析报告.docx(13页珍藏版)》请在冰豆网上搜索。
马铃薯收获机振动部件运动学分析报告
马铃薯收获机振动部件运动学分析
摘要:
对山西襄垣华成机械制造有限公司生产的4S-280A9型马铃薯收获机的振动部件进行了的运动学分析,建立了其振动机构的运动学数学模型,并运用Matlab软件编程对该数学模型做了仿真,得到了挖掘铲的运动轨迹曲线,机构的振动曲线,位移曲线的一系列重要参数。
振幅为137mm,在所选的输入转速下振动的频率为9Hz。
相比于其它同类马铃薯收获机,存在振幅过大的问题。
关键词:
马铃薯收获机械;振动机构;计算机仿真
引言
使用马铃薯收获机收获马铃薯主要包括挖掘和分离两个过程。
本研究针对的山西襄垣华成机械制造有限公司生产的4S-280A9型马铃薯收获机,其振动部件是包括了挖掘铲和振动筛的整体,挖掘和分离过程没有严格区分。
振动筛上是物料主要是失去土壤保护和缓冲后的马铃薯块茎,振动的频率和振幅与其损伤关系十分密切,所以对马铃薯收获机振动部件进行研究以获得最佳机构参数有着重要意义。
1数学模型的建立
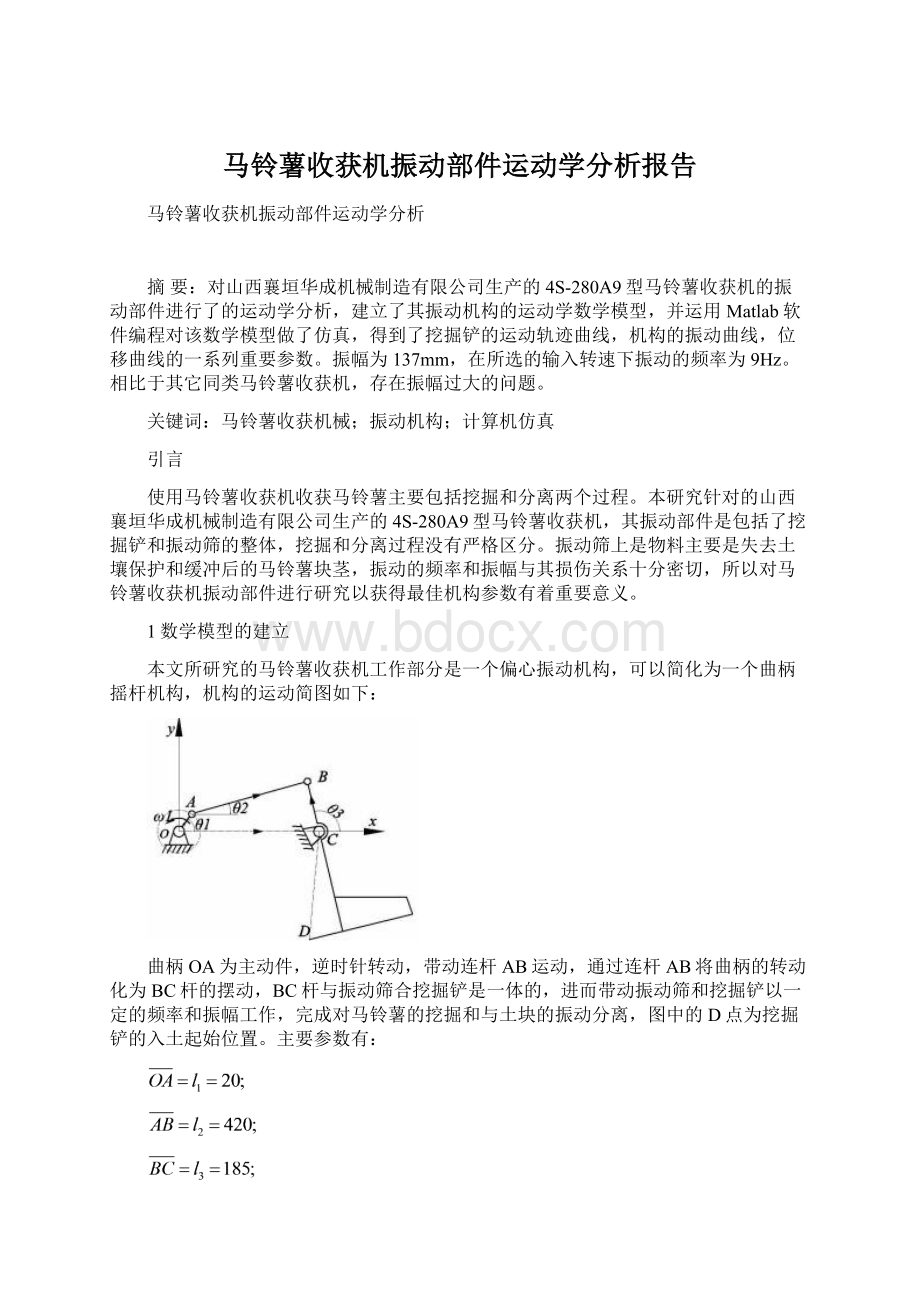
本文所研究的马铃薯收获机工作部分是一个偏心振动机构,可以简化为一个曲柄摇杆机构,机构的运动简图如下:
曲柄OA为主动件,逆时针转动,带动连杆AB运动,通过连杆AB将曲柄的转动化为BC杆的摆动,BC杆与振动筛合挖掘铲是一体的,进而带动振动筛和挖掘铲以一定的频率和振幅工作,完成对马铃薯的挖掘和与土块的振动分离,图中的D点为挖掘铲的入土起始位置。
主要参数有:
在上图中的四杆机构用位移矢量取代连杆,如图所示可得一个闭环矢量方程。
数学模型的建立过程如下:
(1)矢量方程:
①
求解角
:
将①式,整理为:
②
两端各自点积:
由上式整理得:
分别令:
则上式可整理为
解之得:
将①式整理为
③
同理,可解得:
其中,
(2)l3杆的角速度,将②式对时间求导可得:
④
将两边同时用e2点积,消去θ2得:
其中
、
即
、
,整理得:
同理可得:
挖掘铲末端D点是绕定轴转动的刚体上的一点,所以,D点的切向速度分别可以表示为:
(3)l3杆的角加速度,对④式取t的导数:
⑤
上式中由于l1为匀速转动,故角加速度为0,即
。
用
点积⑤式:
整理得
同理,用
点积⑤式,可消去
,整理得:
(4)挖掘铲末端D点是绕定轴转动的刚体上的一点,所以,D点的加速度分别可以表示为:
D点的切向(转动加速度):
法向(向心加速度):
合加速度:
(5)由图中的几何关系得D点的位移轨迹方程
也可进一步整理为
2运动学仿真
对以上数学模型编制Matlab程序,(程序清单附后),其中设经减速器输入曲柄的转速为540r/min,曲柄逆时针匀速转动,仿真时间为曲柄的两个转动周期。
仿真程序的运行结果如下:
1.挖掘铲末端D点的位移函数曲线:
图1:
挖掘铲末端D点的位移函数曲线
2.D点的切向速度曲线:
图2:
D点的切向速度曲线
3.D点的切向加速度、向心加速度和总加速度
图3a:
D点的切向加速度
图3b:
D点的向心加速度
图3c:
D点的加速度
4.D点的位移轨迹方程
图4a:
D点在X坐标方向的位移轨迹
图4b:
D点在Y坐标方向的位移轨迹
由图1可知D点的运动范围为283~557mm,运动的周期是由输入的曲柄转速决定的,约为0.11s,对以上仿真结果的分析可知,所研究的马铃薯收获机其振动参数为:
振幅为137mm,在所选的输入转速下振动的频率为9Hz。
对比其它同类的马铃薯收获机械来看,存在着振幅过大的问题,它同类的马铃薯收获机械一般振幅为30mm。
过大的振幅会增大伤薯率,不仅不利于生产,还会对操作者的健康造成重大影响,应进一步对其结构参数进行优化。
3总结
本研究将马铃薯收获机的偏心振动机构转化为一个曲柄摇杆机构,并用矢量法建立了该曲柄摇杆机构的运动学数学模型。
该数学模型可以用来分析不同的转速,以及不同的曲柄长度(即,偏心距)对机构振动参数的影响。
在对马铃薯收获机振动部件的进一步分析,以及参数优化等研究中有重要的应用价值。
附录(程序清单):
1、D点的位移函数曲线
%2010年11月20日。
%D点的位移函数曲线
clear;clc;closeall;
%基本参数
L1=20;L2=420;L3=185;L4=460;L5=202;%各杆的长度
w=540;%曲柄角速度为540r/min,匀速转动
w1=w*2*pi/60;%将角速度化为弧度单位rad/s
T=2*pi/w1;%计算曲柄的转动周期
t=0:
0.0001:
2*T;%设置仿真时间为2个周期。
theta1=w1*t;%曲柄和x轴的夹角θ1是时间t的函数
M=2*L1*L3*sin(theta1);
N=2*L3*(L1*cos(theta1)-L4);
P=L2^2-L1^2-L3^2-L4^2+2*L1*L4*cos(theta1);
BB=M+sqrt(M.^2+N.^2-P.^2);CC=N-P;
A=BB./CC;
B=atan(A);
B=-2*B;%B即θ3
alfa=21*180/pi;
theta5=B+pi-alfa;%L5和x轴的夹角θ5
Yd=(L4+L5*sin(theta5)).*tan(theta5)-L4*tan(theta5);
plot(t,Yd,'LineWidth',2.5);gridon;
title('D点的位移曲线','FontSize',28,'FontName','汉仪粗宋简');
xlabel('Time/秒','FontSize',24,'FontName','Times');
ylabel('D点位移/mm','FontSize',24,'FontName','Times');
2、D点的切向速度曲线
%2010y11m20d
%D点的速度曲线(切向)
%已知刚体的转动角速度,求
%绕定轴转动刚体上的一点,其运动情况。
clear;clc;closeall;
%基本参数
L1=20;L2=420;L3=185;L4=460;L5=202;%各杆的长度
w=540;%曲柄角速度为540r/min,匀速转动
w1=w*2*pi/60;%将角速度化为弧度单位rad/s
T=2*pi/w1;%计算曲柄的转动周期
t=0:
0.0001:
2*T;%设置仿真时间为2个周期。
theta1=w1*t;%曲柄和x轴的夹角θ1是时间t的函数
M=2*L1*L3*sin(theta1);
N=2*L3*(L1*cos(theta1)-L4);
P=L2^2-L1^2-L3^2-L4^2+2*L1*L4*cos(theta1);
BB=M+sqrt(M.^2+N.^2-P.^2);CC=N-P;
A=BB./CC;
B=atan(A);theta3=-2*B*pi/180;%B即θ3/2
Md=2*L1*L2*sin(theta1);
Nd=2*L2*(L4-L1*cos(theta1));
Pd=L3^2-L1^2-L2^2-L4^2+2*L1*L4*cos(theta1);
BBd=Md+sqrt(Md.^2+Nd.^2-Pd.^2);CCd=Nd-Pd;
Ad=BBd./CCd;
Bd=atan(Ad);theta2=2*Bd*pi/180;%Bd即θ2/2
m3=theta1-theta2;m33=theta3-theta2;
m2=theta1-theta3;m22=theta2-theta3;
w3=(w1*L1*sin(m3))./(L3*sin(m33));
vd=w3.*L5;
%-------------------------------------------------------------------------
plot(t,vd,'LineWidth',2.5);gridon;
xlabel('Time/s','FontSize',22,'FontName','汉仪粗宋简');
ylabel('D点的切向速度(mm/s)','FontSize',22,'FontName','汉仪粗宋简');
3、D点的切向加速度、向心加速度和总加速度
%2010年12月7日
%D点的切向加速度和向心加速度,总加速度
clear;clc;closeall;
%基本参数
L1=20;L2=420;L3=185;L4=460;L5=202;%各杆的长度
w=540;%曲柄角速度为540r/min,匀速转动
w1=w*2*pi/60;%将角速度化为弧度单位rad/s
T=2*pi/w1;%计算曲柄的转动周期
t=0:
0.0001:
2*T;%设置仿真时间为2个周期。
theta1=w1*t;%曲柄和x轴的夹角θ1是时间t的函数
%w0=w1/60*2*pi;%角速度换算为rad/s
M=2*L1*L3*sin(theta1);
N=2*L3*(L1*cos(theta1)-L4);
P=L2^2-L1^2-L3^2-L4^2+2*L1*L4*cos(theta1);
BB=M+sqrt(M.^2+N.^2-P.^2);CC=N-P;
A=BB./CC;
B=atan(A);theta3=-2*B*pi/180;%B即θ3/2
Md=2*L1*L2*sin(theta1);
Nd=2*L2*(L4-L1*cos(theta1));
Pd=L3^2-L1^2-L2^2-L4^2+2*L1*L4*cos(theta1);
BBd=Md+sqrt(Md.^2+Nd.^2-Pd.^2);CCd=Nd-Pd;
Ad=BBd./CCd;
Bd=atan(Ad);theta2=2*Bd*pi/180;%Bd即θ2/2
m3=theta1-theta2;m33=theta3-theta2;
m2=theta1-theta3;m22=theta2-theta3;
w3=(w1*L1*sin(m3))./(L3*sin(m33));%杆BC的角速度
w2=(-1*w1*L1*sin(m2))./(L2*sin(m22));%杆AB的角速度
%——————————————————————————————————
alfa3=(w1^2*L1*cos(m3)+(w2.*w2)*L2-((w3.*w3)*L3).*cos(m33))./(L3*sin(m33));
%BC杆角加速度方程
%--------------------------------------------------------------------------
alfa2=(-1*w1^2*L1*cos(m2)+(w3.*w3)*L3-((w2.*w2)*L2).*cos(m22))./(L2*sin(m22));
%AB杆角加速度方程
%————————————————————————————
vd=w3.*L5;%D点的切向速度
adt=alfa3.*L5;%D点的切向加速度,即转动加速度
adn=vd.*w3;%D点的向心加速度,即法向加速度
ad=sqrt(adt.^2+adn.^2);%D点的合加速度
%---------------------以下绘图----------------------------
figure;
plot(t,adt,'LineWidth',2.3);gridon;
xlabel('Time/s','FontSize',22,'FontName','汉仪粗宋简');
ylabel('D点的切向加速度(mm/s^2)','FontSize',22,'FontName','汉仪粗宋简');
%-------------------------------------------------------------------------
figure;
plot(t,adn,'r','LineWidth',2.3);gridon;
xlabel('Time/s','FontSize',22,'FontName','汉仪粗宋简');
ylabel('D点的向心加速度(mm/s^2)','FontSize',22,'FontName','汉仪粗宋简');
%-------------------------------------------------------------------------
figure;
plot(t,ad,'k','LineWidth',2.3);gridon;
xlabel('Time/s','FontSize',22,'FontName','汉仪粗宋简');
ylabel('D点合加速度(mm/s^2)','FontSize',22,'FontName','汉仪粗宋简');
4.D点的位移轨迹方程
%D点的位移轨迹方程,从表达式看是一个圆上的一部分。
%实际轨迹也是如此。
从CAD图中也可以看到。
clear;clc;closeall;
%基本参数
L1=20;L2=420;L3=185;L4=460;L5=202;%各杆的长度
w=540;%曲柄角速度为540r/min,匀速转动
w1=w*2*pi/60;%将角速度化为弧度单位rad/s
T=2*pi/w1;%计算曲柄的转动周期
t=0:
0.0001:
2*T;%设置仿真时间为2个周期。
theta1=w1*t;%曲柄和x轴的夹角θ1是时间t的函数
M=2*L1*L3*sin(theta1);
N=2*L3*(L1*cos(theta1)-L4);
P=L2^2-L1^2-L3^2-L4^2+2*L1*L4*cos(theta1);
BB=M+sqrt(M.^2+N.^2-P.^2);CC=N-P;
A=BB./CC;
B=atan(A);
B=-2*B*pi/180;%B即θ3
alfa=21*pi/180;
theta5=B+pi-alfa;%L5和x轴的夹角θ5
%---------------------------------------------------
XD=L4+L5*cos(theta5);
YD=-L5*sin(theta5);
%---------------------------------------------------
%yd=sqrt(L5^2-(xd-L4)^2);
%---------------------------------------------------
figure;
plot(t,XD,'LineWidth',2.5);gridon;
xlabel('Time/秒','FontSize',24,'FontName','汉仪粗宋简');
ylabel('D点位移(X)/mm','FontSize',24,'FontName','汉仪粗宋简');
%---------------------------------------------------
figure;
plot(t,YD,'r','LineWidth',2.5);gridon;
%title('D点的位移曲线','FontSize',28,'FontName','汉仪粗宋简');
xlabel('Time/秒','FontSize',24,'FontName','汉仪粗宋简');
ylabel('D点位移(Y)/mm','FontSize',24,'FontName','汉仪粗宋简');
%---------------------------------------------------
figure;
plot(XD,YD,'k','LineWidth',2.5);gridon;
%title('D点的轨迹曲线','FontSize',28,'FontName','汉仪粗宋简');
xlabel('X坐标/mm','FontSize',24,'FontName','汉仪粗宋简');
ylabel('D点轨迹曲线/mm','FontSize',24,'FontName','汉仪粗宋简');
 升级会员
升级会员 