自动控制考试题三及答案.docx
《自动控制考试题三及答案.docx》由会员分享,可在线阅读,更多相关《自动控制考试题三及答案.docx(15页珍藏版)》请在冰豆网上搜索。
自动控制考试题三及答案
一、(6分)判断题
1.线性系统的传递函数与系统的结构及输入信号有关。
()
2.传递函数中的s是有量纲的。
()
3.系统的脉冲响应反映了系统的静、动特性,可作为系统的数学模型。
()
4.线性系统的稳定性只与系统的结构有关。
()
5.闭环系统的极点是稳定的实极点,则阶跃响应是无起调的。
()
6.稳态误差为无穷大的系统是不稳定的系统。
()
7.幅频特性相同的系统相频特性必相同。
()
8.单位负反馈系统的开环传递函数为
,式中
则该系统的稳定性与的大小无关()
9.当系统输入正弦信号时,系统的稳态输出称之为频率特性。
()
10.由最大相位系统的Bode图,当
时,若
,则由该系统所得的单位负反馈系统必稳定。
()
11.单位负反馈系统的开环系统的中频段决定了系统的动静态性能。
( )
12.串联滞后矫正是利用矫正网络的滞后特性从而改善系统性能的。
( )
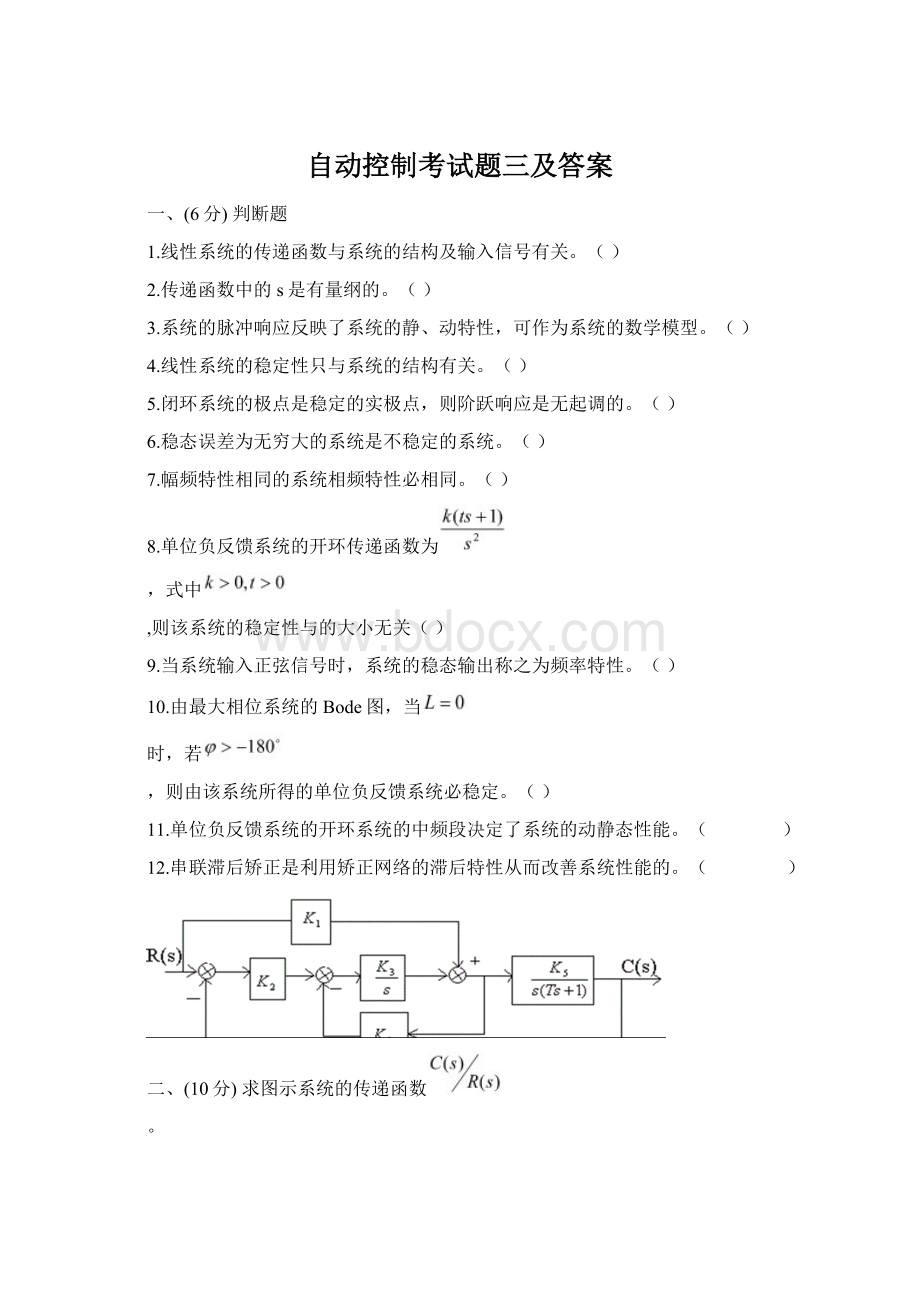
二、(10分)求图示系统的传递函数
。
三、(18分)已知某单位反馈系统的开环传递函数为
,
1.试求出该系统的单位阶跃响应的起调量和调整时间,并画出阶跃响应的大致图形,在图上表出性能指标
,
的定义(
取5%);
2.为了改善系统性能,对该系统实施速度反馈,试画出速度反馈系统的方块图。
为使系统的阻尼比为0.7,速度反馈系数为多少?
四、(18分)设某控制系统如图所示,误差定义为
,试选择参数z和b的值,使系统对速度输入信号
的稳定误差为0。
五、(10分)该控制系统的结构如图,现在为了使系统特征方程的根的实数部分小于-1,试确定传递函数k的数值范围。
六、(15分)设单位负反馈系统的开环传递函数为
,试作出相应的根轨迹图,确定使系统的开环放大倍数
且系统增益裕度
的
值的范围。
七、计算作图题(10分)
已知单位负反馈的开环传递函数如下:
试画出极坐标图,要求画出相角裕量和幅值裕量。
1.
七、计算作图简答题(10分)
已知某单位负反馈系统,矫正前的开环传递函数为
,矫正后的开环传递函数为
,试求:
1.矫正前后系统的静态速度误差系数,穿越频率
及相位裕度。
2.矫正装置是那种类型?
3.说明矫正后的系统,哪些方面的特性得到了改善?
哪些方面会多出新问题?
答案:
一.(12分)
1.F;2.T3.T4.F5.T6F7.F8.T9.F.10.T11.F12.F
二(10分)
三.(18分)
解:
1.
为典型二阶系统,
(弧度/秒),
;
2.
(弧度/秒),
得
四.(10分)
解:
当
时,
当
时,
五.(10分)
六.(15分)
解:
开环极点
实轴上根轨迹
渐进线
与虚轴交点
116
7
临界稳定时的
(令
得到)
此时,由
行
即
,得
。
由于开环放大倍数
要求
即
又增益裕度为
,要求
即
所以当
时,能满足
,增益裕度
的要求。
七.(10分)
(1)
(2)
八.(15分)
1.校正前:
;
校正后:
2.相位超前校正。
稳定误差未变。
快速性和稳定性得到了改善。
不过,系统抗高频干扰的能力有所下降。
(二)
一.选择题:
(10分)
1.有串联矫正环节
是属于()。
(1)相位超前矫正;
(2)相位滞后矫正;
(3)增益调整;(4)相位矫正超前矫正。
2.某系统的传递函数为
,其极点是()。
3.设系统开环传递函数为
,函数
则
与
()。
(1)极点相同;
(2)零点相同;
(3)零极点都相同;(4)零极点都不同。
4.一个单位负反馈系统为I型系统,开环增益为k,则在
输入下,此系统的()。
(1)稳态速度误差是
;
(2)稳态加速度误差不是
;
(3)稳态速度误差是
;(4)稳态位置误差是
。
5.已知系统频率特性为
,则该系统可表示为()。
.
6.对欠阻尼系统,为提高系统的相对稳定性,可以( )。
(1)增大系统的固有频率;(2)减小系统的固有频率;
(3)增加阻尼; (4)减小阻尼。
7.线性系统的传递函数
( )。
(1)随着输入的该变而变化;(2)代表了系统本身的物理结构;
(2)取决于系统本身的多态特性。
仅于系统的结构 参数有关。
8.将系统的输出不断的全部或部分的返回输入,成为( )。
(1)调整; (2)测量; (3)矫正; (4)反馈。
9.(2分)若要求在基本保持原系统的稳定性和频带宽的前提下,提高系统的控制精度,减 小稳态误差,则通常较有效的措施是采用( )。
(1)提高开环增益,且串联相位滞后矫正;
(2)单纯的提高开环增益;
(3)不提高增益,单纯的采用相位滞后矫正;
(4)提高开环增益,且串联相位超前矫正。
二.(12分)
控制系统的结构如图所示,
和
分别为前向通道和反馈通道的增益常数,现要求系统的前向通道的传递函数为
,试确定满足此要求的
和
的值以及反馈通道的传递函数
。
三.(15分)计算作图题:
已知某单位反馈系统的开环传递函数为
,
(1)试求该系统在单位阶跃信号作用下的超调量和调整时间(
取
);
(2)为了使系统阻尼比为0.7,对系统实施速度反馈,试画出速度反馈的系统方块图,并求出速度反馈系数;
(3)画出单位阶跃响应的大致图形,在图上标出性能指标
的定义。
四.(10分)
已知一稳定系统的闭环传递函数为
,误差定义为
,试求系统对输入为
时,系统的稳态
误差。
五.(10分)
设单位反馈系统的开环传递函数为
,若要求闭环特征方程的根的实部均小于-1,问k值应取在什么范围内?
如果要求实部均小于-2,情况又如何?
六.(13分)计算作图题:
用根轨迹法确定图示系统无超调的k值范围。
七.(5分)
设单位反馈系统的开环传递函数为
,试确定使相角裕量等于
时的a值。
八.(10分)
对于图示的二阶系统,试画出开环闭环频率特性的Bode图。
在Bode图上标出代表频域性能指标的
(开环截止频率)
(相角裕量)谐振峰值
及带宽频率
,并定性说明这四个参数与时域性能的关系。
九.(15分)
最小相位系统的开环对数幅频特性如图所示,试求:
(1)系统的开环传递函数;
(2)作出开环系统的幅相曲线,并用奈奎斯特稳定判据闭环系统的稳定性;
(3)计算系统的相角裕度
;
(4)
试求静态误差系数
和
。
答案:
1.
(1)2.
(2)3.
(1)4.(4)5.
(2)6.(3)7.(3)8.(4)9.
(1)(2分)
二.(12分)
由
取
有
三.(15分)
(1)
(2)
(3).
四.(10分)
当
时
五.(10分)
(2)无论k为何值,系统均能满足所有极点实部小于-2.
六.(13分)
使系统无超调的范围是
七.(5分)
八.(10分)
及
代表系统的快速性;
及
代表系统响应过程的平稳性.
开环频率特性Bode图闭环频率特性Bode图
九.(15分)
稳定;
(4)
 升级会员
升级会员 