遥感图像几何精校正实验报告.docx
《遥感图像几何精校正实验报告.docx》由会员分享,可在线阅读,更多相关《遥感图像几何精校正实验报告.docx(10页珍藏版)》请在冰豆网上搜索。
遥感图像几何精校正实验报告
遥感图像几何精校正
实验名称:
遥感图像的几何精校正。
实验目的:
1.了解和熟悉envi软件的几何校正的原理
2.熟悉和掌握envi软件的几何校正的功能和使用方法;
3.对自己的图像先找到投影,再另存一幅图像,去掉投影,在其它软件中旋转一
角度,用原先的图像作为参考对旋转后的图像进行几何校正,使得其比较精确。
实验原理:
几何校正,主要方法是采用多项式法,机理是通过若干控制点,建立不同图像间的多项式控件变换和像元插值运算,实现遥感图像与实际地理图件间的配准,达到消减以及消除遥感图像的几何畸变。
多项式几何校正激励实现的两大步:
1.图像坐标的空间变换:
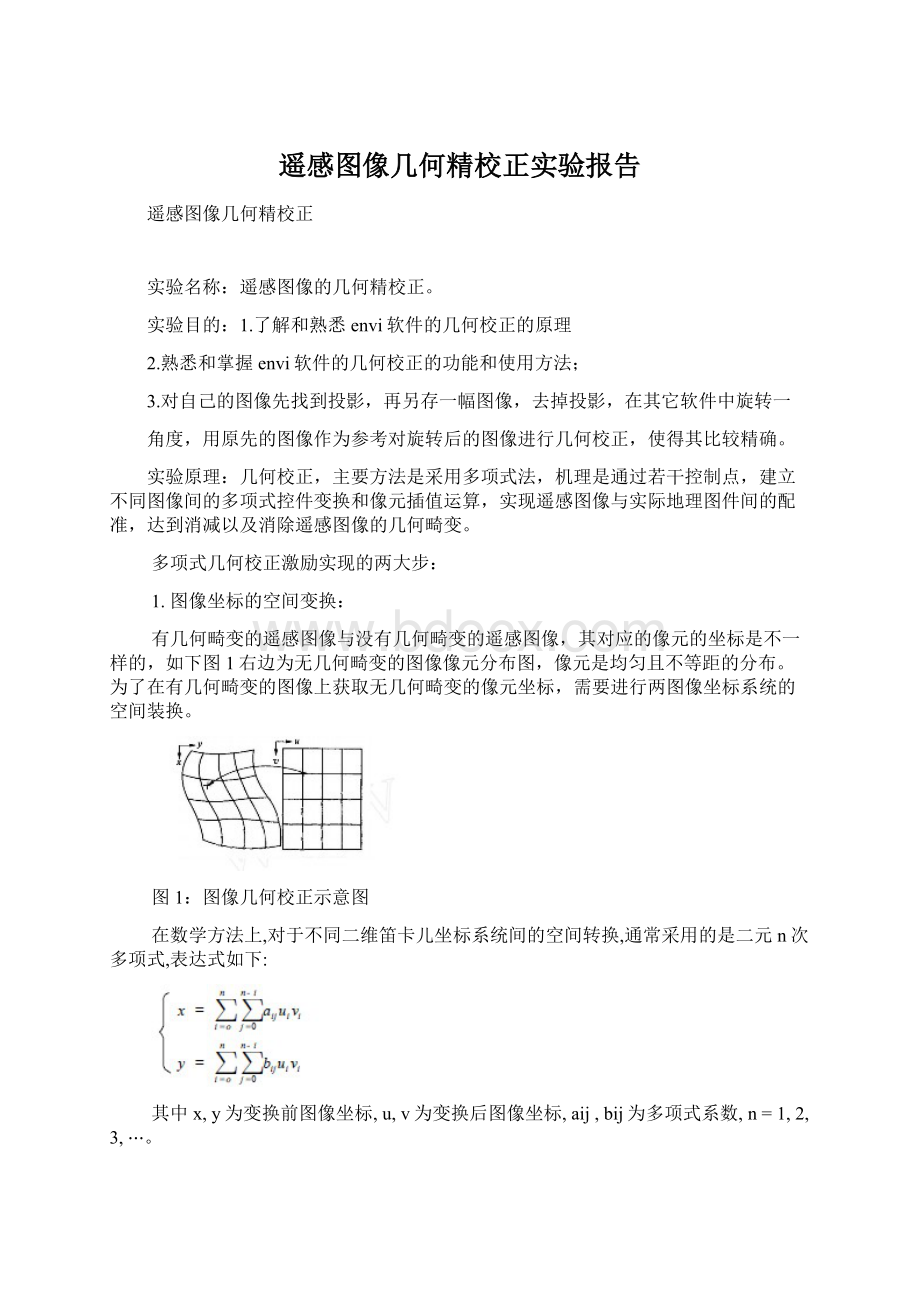
有几何畸变的遥感图像与没有几何畸变的遥感图像,其对应的像元的坐标是不一样的,如下图1右边为无几何畸变的图像像元分布图,像元是均匀且不等距的分布。
为了在有几何畸变的图像上获取无几何畸变的像元坐标,需要进行两图像坐标系统的空间装换。
图1:
图像几何校正示意图
在数学方法上,对于不同二维笛卡儿坐标系统间的空间转换,通常采用的是二元n次多项式,表达式如下:
其中x,y为变换前图像坐标,u,v为变换后图像坐标,aij,bij为多项式系数,n=1,2,3,⋯。
二元n次多项式将不同坐标系统下的对应点坐标联系起来,(x,y)和(u,v)分别应不同坐标系统中的像元坐标。
这是一种多项式数字模拟坐标变换的方法,一旦有了该多项式,就可以从一个坐标系统推算出另一个坐标系统中的对应点坐标。
如何获取和建立二元n次多项式,即二元n次多项式系数中a和b的求解,是几何校正成败的关键。
数学上有一套完善的计算方法,核心是通过已知若干存在于不同图像上的同名点坐标,建立求解n次多项式系数的方程组,采用最小二乘法,得出二元n次多项式系数。
不同的二元n次多项式,反映了几何畸变的遥感图像与无几何畸变的遥感图像间的像元坐标的对应关系,其中哪种多项式是最佳的空间变换模拟式,能达到图像间坐标的完全配准,是需要考虑和分析的。
在二元n次多项式数字模拟中,从提高几何校正精度的角度考虑,需要兼顾的因素主要有引起几何畸变的原因和产生数学运算误差因素。
归纳起来有三个方面的考虑因素:
(1)是多项式中n值的选择,n值与几何畸变的复杂程度密切相关。
当n=1,上述的坐标空间变换成为二元一次多项式,可以进行线性的坐标变换,解决比例尺、中心移动、歪斜等方面的几何畸变,实用于第2级别以上的遥感数据。
n值的不同选择,可以得到不同的空间变换式,当n≥2,上述的坐标空间变换成为二元非线性多项式,解决遥感器偏航、俯仰、滚动等因素引起的几何畸变。
从理论上讲,n值越大,越能校正复杂的几何畸变,但计算量也相对要大。
实际应用中n值通常取小于等于3。
(2)是控制点GCP(用于空间坐标变换的同名坐标点)的选择,GCP的几何精度直接影响着多项式系数的求解误差大小。
成熟的作法是:
通过目视,选择熟悉的、易分辩且精细较高的特征点(如小水塘边缘、线状地物的交叉点、海岸线弯曲处等),且GCP分布在全图中要尽量均匀,特征变化性大的地区选择多些,图像边缘部分选些控制点,使系数的求解尽可能准确。
控制点精度的衡量尺度为RMS(RootMeanSquare)参数,意为均方根,以图像像素大小为单位,表达式为:
x,y为无几何畸变的图像控制点坐标,x′,y′为变换后图像控制点坐标。
在ERMAPPER7.0或ENVI等遥感软件中,对于一次线性变换,当采集到4个控制点以上时,软件系统就会自动推算控制点的变换值和RMS,可以很好地辅助控制点的编辑。
在实际应用中需要引起注意的是:
随着控制点数目的增减,多项式系数值也在变化,每个控制点的RMS也在变化。
当RMS值都小于等于1时,控制点的精度控制在一个像素大小上,几何校正效果较好。
(3)最后是控制点GCP数目的确定,从数学运算上来说,一次多项式变换,存在6个系数要计算,需要GCP的最少数目是3。
二次多项式变换,有12个系数需要计算,GCP最少数目是6。
n次多项式,GCP的最小数目为(n+1)(n+2)/2。
但在实际应用中,采用最小GCP数目,几何校正效果往往不好。
所以在条件允许的条件下,GCP数目要远远大于最小数目,可以是其的6倍。
2.图像像元灰度值重采样
经过上述图像像元坐标的空间变换,得到对应于实际地面或无几何畸变的图像坐标,图像上每个像元都有了无几何畸变的坐标值。
随后需要做的是给每个像元赋亮度值。
因为已知的图像数据是有几何畸变的像元亮度值,并没有校正后的无几何畸变的像元亮度值。
所以需要通过数学上的重采样方法如最近邻法、双向线性内插法和三次卷积内插法等计算出校正后像元位置的亮度值,形成无几何畸变的遥感数据。
在重采样方法中,三次卷积内插法计算量虽最大,但图像质量要好,细节表现要清晰,是许多遥感软件的首选方法。
数据来源:
国际科学数据服务平台,landsat数据,TM。
实验过程:
1.打开参考影像(base)和待校正影像:
分别设为display#1,display#2,
如下图所示(左边是参考图像,右边是待校正图像):
2.在主菜单上选择map,然后选择Registration,然后选择selectGCPs:
imagetoimage,出现窗口ImagetoImageRegistration如图所示:
3.分别在两边选中DISPLAY#1(左),和DISPLAY#2(右)。
BASE图像指参考图像而warp则指待校正影像,然后选择OK。
,出现如下图的窗口:
然后就可以选择点了:
将两边的影像十字线焦点对准到自己认为是同一地物的地方,就可以选择AddPoint添加点了。
上图也是添加了四个点以后的图。
然后点击showlist就可以看到选择所有的控制点,如下图:
选好4个点后就可以预测:
把十字架放在参考影像某个地物,点选predict则待校正影像就会自动跳转到与参考影像相对应的位置,而后再进行适当的调整并选点。
4.选点结束后,首先把点保存了:
选择groundcontrolpoints窗口上的file,然后选择savegcpasASCII..,出现下图:
填上保存路径就可以了。
5.进行校正:
在groundcontrolpoints.对话框中选择optionswarpfile(asimagetomap),出现如下图所示窗口:
在出现的imputwarpimage中选中你要校正的影像(第一个图片),出现图片的信息:
点ok进入registrationparameters对话框(如下图所示):
上图中重采样选择Bilinear,背景值(Background)为0,选择输出途径和文件名例如下图:
然后选择ok就行了。
实验结果与分析:
结果如下图时校正前后的对比图:
分析:
通过校正后我们很明显地看到,两幅图像基本已经相似了,但还是有一点小误差,这是因为选点时不够精细。
实验心得:
通过这次的校正实验,初步了解了如何用envi对图像进行几何校正了,虽然结果不是很理想,这个主要是在各点的选取上不太准确,引起的偏差太大。
建议:
对于几何校正的过程还应该加强练习,尽量做到很熟练地程度。
 升级会员
升级会员 