三菱MRJ340B伺服放大器应用实例.docx
《三菱MRJ340B伺服放大器应用实例.docx》由会员分享,可在线阅读,更多相关《三菱MRJ340B伺服放大器应用实例.docx(11页珍藏版)》请在冰豆网上搜索。
三菱MRJ340B伺服放大器应用实例
三菱MR-J3-40B伺服放大器应用实例
本人设计一套空间曲线自动焊接设备时用到了三菱MR-J3-40B伺服放大器,现将设计与使用心德与大家分享如下。
本空间曲线焊接设备控制系统包括三菱Q系列CPU、输入模块、输出模块、QD75MH4定位模块、人机界面和3个MR-J3-40B伺服放大器及电机。
三菱MR-J3-40B伺服放大器使用主要包括电气接线、外围开关设定和参数程序设定调试等三部分。
1电气接线
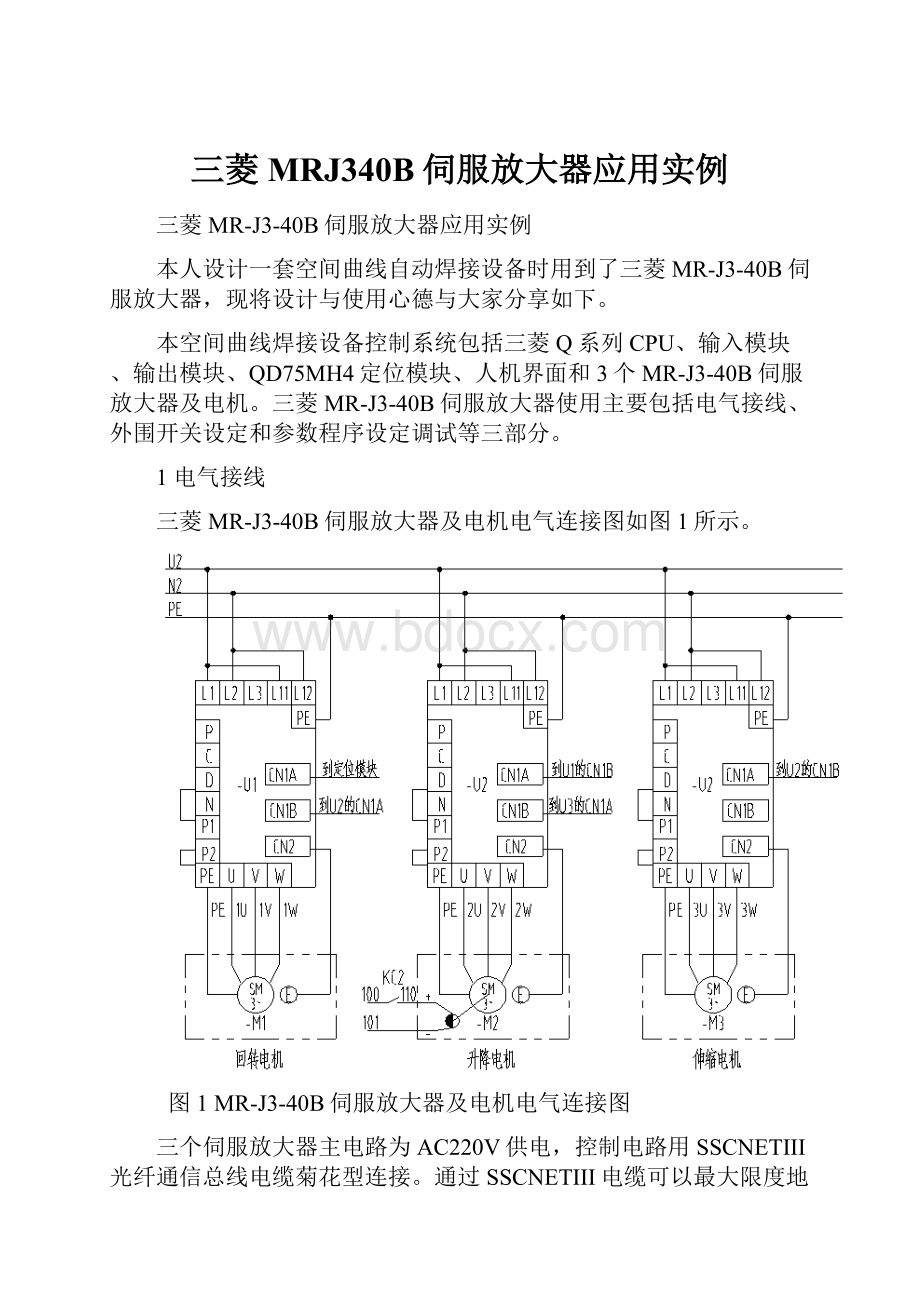
三菱MR-J3-40B伺服放大器及电机电气连接图如图1所示。
图1MR-J3-40B伺服放大器及电机电气连接图
三个伺服放大器主电路为AC220V供电,控制电路用SSCNETIII光纤通信总线电缆菊花型连接。
通过SSCNETIII电缆可以最大限度地节省配线,两站之间的最大连接距离可达50米。
MR-J3-40B伺服放大器与HF-KP43伺服电机之间接线
如图2所示,伺服电机HF-KP43与伺服放大器MR-J3-40B编码器接口针脚号及接线方式如图3所示。
图2伺服与电机之间动力线接线图
图3伺服与电机之间编码器接线图
根据上述方法连接好伺服放大器及电机的线缆后伺服放大器如图4所示。
图4接好线后的伺服放大器
2外围开关设置
MR-J3-40B伺服放大器外围开关设定:
正常运行时,拔码开关SW2均需拔在Down。
根据伺服放大器所处位置及位置模块的定义,SW1选择伺服放大器所对应的轴:
SW1=0时对应第一轴,SW1=1时对应第二轴,以此类推,SW1=15时对应第十六轴。
本实例中回转伺服SW1=0,升降伺服SW1=1,伸缩伺服SW1=2。
如图5所示。
本系统采用绝对位置定位,所以伺服放大器需配绝对位置记忆的电池,伺服放大器的CN4接口接电池,电池如图6所示。
图5伺服放大器外围开关
图6MR-J3-40B伺服放大器绝对位置记忆电池
3参数程序设定调试
伺服放大器外围接线完成并外围开关设定好之后,就可以接通伺服放大器电源,点亮伺服放大器,此时有两种方法可以设定伺服放大的的参数,一种是通过CN5口用电脑将设定好的参数下载到伺服放大器中,另一种方式是在GX-Works2中的通过编程的方式进行参数设定后下载到Q系列PLC中,再通过QD75MH4模块的SSCNETIII光纤通信总线控制伺服放大器。
本例是采用后一种方式。
参数部分设定画面及部分程序如图7、8、9、10所示。
图7参数设定画面
图8伺服参数设定画面
图9轴定位数据设定画面
图10部分程序梯形图
将GX-Works2中编好的程序下载到Q系列PLC中,然后调试程序及动作,调试心德总结如下:
1、MR-J3-40B伺服放大器内部主要分为整流模块和控制模块,整流模块可以通过万用表量通断的方法判断是否有损坏或故障,具体方法如下:
用指针万用表量P、N分别对电源输入的L1、L2、L3和电源输出的U、V、W的阻值(如没有指针万用表也可以用数字万用表代替),P黑表笔对U、V、W红表笔的电阻约445Ω,P黑表笔对L1、L2、L3红表笔的电阻值无限大,N红表笔对U、V、W黑表笔的电阻值约445Ω,N红表笔对L1、L2、L3黑表笔的电阻值约530Ω)。
2、定位模块QD75MH4、伺服放大器MR-J3-40B、伺服电机HF-KP43连接好通电后,伺服电机不能正常转矩保持,用手旋转电机轴,电机轴会来回振动,此时,首先检查伺服电机与伺服驱动器之间的U、V、W接线是否完全正确,再检查编码器接线,如果都没有问题,可以通过增大伺服参数中自动调谐响应性的值来增大保持转矩。
3、HF-KP43伺服电机在与伺服驱动器连接时或得电一段时间断电后,手动旋转电机轴会感觉有点发卡,长时间断电后会恢复正常,所以一般情况下不要判断为伺服电机有问题。
4、MR-J3-40B伺服放大器用绝对位置定位第一次接通电源,会报绝对位置丢失(25)错误,报警可以通过切断电源并再次接通电源而解除,报警解除后再次设定原点位置。
5、将地址1-600的运行模式改为轨迹,实现1-600-1-600…的循环,循环过程中实时改变1-600定位地址中的值,以满足绝对定位时多圈焊接,但注意定位地址值有一固定范围,不能超过。
6、可以通过参数中每转的移动量来调试电机转一转机械执行机构运行的距离。
7、可以通过GX-Works2中工具→智能功能模块用工具→QD75型定位模块中的定位监视及定位测试进行伺服测试和运行监视(调试过程中,用定位数据定位时,600个地址中有两个定位方式选错,运行时总是出现异常反转,检测程序及参数没有发现错误,如此折腾了两天,后来通过定位监视中看出有两个定位方式错选为增量方式)。
系统一些相关图片如下:
PLC系统
三个MR-J3-40B伺服放大器
HF-KP43伺服电机
HF-KP43B带制动伺服电机
三个伺服电机
系统调试中
系统电控箱
(注:
可编辑下载,若有不当之处,请指正,谢谢!
)
 升级会员
升级会员 