移动网络CPRP部分2.docx
《移动网络CPRP部分2.docx》由会员分享,可在线阅读,更多相关《移动网络CPRP部分2.docx(27页珍藏版)》请在冰豆网上搜索。
移动网络CPRP部分2
第二章APZ部分(CP/RP)
一、CP的发展历史及性能比较
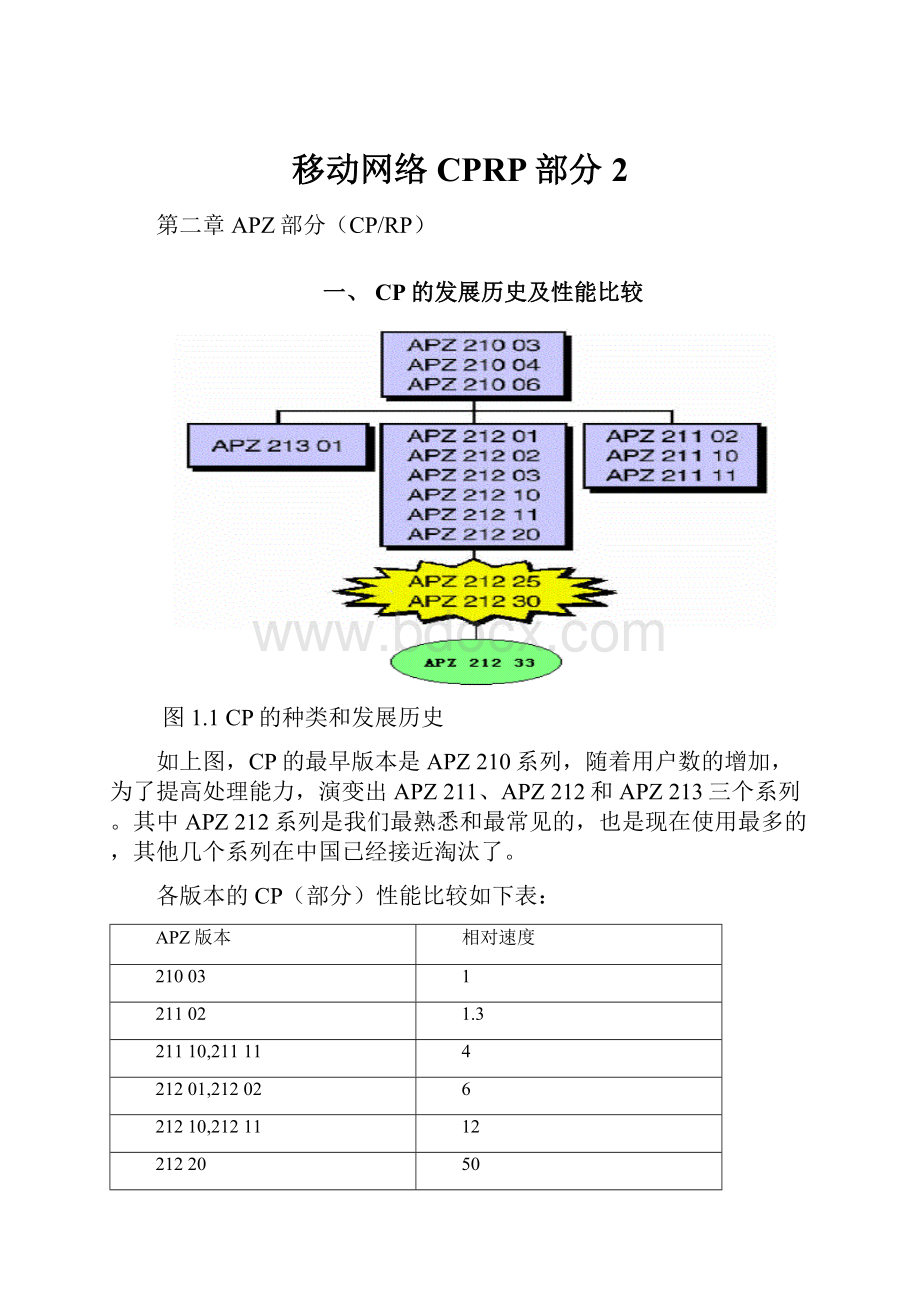
图1.1CP的种类和发展历史
如上图,CP的最早版本是APZ210系列,随着用户数的增加,为了提高处理能力,演变出APZ211、APZ212和APZ213三个系列。
其中APZ212系列是我们最熟悉和最常见的,也是现在使用最多的,其他几个系列在中国已经接近淘汰了。
各版本的CP(部分)性能比较如下表:
APZ版本
相对速度
21003
1
21102
1.3
21110,21111
4
21201,21202
6
21210,21211
12
21220
50
21225
20
21230
200
21233
300
广东省目前最常用的CP是APZ21230和APZ21233这两个类型,光从处理能力来看,30的CP能够处理的用户数是30-40万左右,而33的处理能力大概是30的1.5~1.8倍左右。
下面介绍CP的功能和结构的时候,主要就以这两种为例。
二、CP的硬件结构
1、APZ21230/33的实物面板图
APZ21230/33A面CP实物图
APZ21230/33B面CP实物图
APZ21230/33B面CP的面板示意图
2、CPU面板的各PCB介绍
•POU-C:
电源模块
•SPU(SignalProcessorUnit):
和RP通信,把来自RP的任务按优先级放到不同的缓冲区,并为IPU准备任务
•IPU:
InstructionProcessorUnit(指令处理单元)
•STUD:
内存板,有DRAM和SRAM,由IPU操作
•MAU:
自动维护单元,只有B边有
•POWC:
包括如下功能
a、ErrorregistrationanderrorsignalingtoMAU
b、CPUworkstatelogic
c、Clockgenerationandclockswitchingfuction
d、LogicforsendingCPTsignalsbetweenSPUandMAU
e、InterfaceforreadingPCBboardsID(self-identifyinghardware)
f、InterfacelogicforMIAindication
g、Supervisionoffansandpower
3、APZ21230/33的硬件功能块
APZ212的功能块示意图
APZ21230/33主要包括如下几个硬件功能块:
(1)、CPU(TheCentralProcessorUnit),包括IPU(InstructionProcessorUnit)和SPU(SignallingProcessorUnit)。
SPU又由两部分组成:
主SPU和从SPU,主要负责作业的调度和管理;而IPU则负责作业的执行。
PS(PROGRAMSTORE,程序存储)和RS(REFERENCESTORE,参考存储)的物理实现是通过IPU来完成的。
CPU的主要工作流程如下:
A、SPUreceivesasignal(job)fromRPHorIPU.
B、WhenthetimecomesIPUwillfetchthejobfromajobbufferin
SPU.
C、IPUfetchesstartaddresseslocatedinRSfortheprogramsequence
tobeexecutedinPSandcorrespondingdatalocatedinDS.
D、IPUfetchesandexecutesprogramsequenceinstructions.Thedata
arefetchedfromDS.
E、TheresultoftheprogramexecutionisfetchedbySPU.Theresult
mightbeanotherjobtobeexecuted.
(2)、TheStorageUnitData(STUD)containstheDataStore(DS).
(3)、TheDisplayandPowerController(DPC),主要目的是监视电源。
(4)、TheRegionalProcessorHandler(RPH),连接RPBUS到CP上,当需要使用不同数量的RP时可以采用不同的硬件配置。
可以分别连接串行RP和并行RP,也可以同时连接串行RP和并行RP。
(5)、TheMaintenanceUnit(MAU),主要目的是监视CP的状态,并作为CP跟CPT系统的接口存在,同时监视用于冷却CP的风扇的状态。
(6)、TheMaintenanceUnitInterface(MAI)andPowerControlUnit
(POWC)。
上面的硬件模块中,CPU、STUD、DPC、MAI和POWC都属于CPS系统,RPH属于RPS子系统,MAU属于MAS子系统。
4、APZ21230/33的总线
APZ21230/33的总线示意图
(1)、RPHB(RPHANDLERBUS)
SPU通过RPHB跟RPH相连,从而控制RP,RPH是RP跟CP之间的接口。
(2)、UMB(UpdatingandMatchingBus)
更新比较总线,Ex侧传送数据到SB侧以比较两侧数据或更新SB侧。
这种总线位于机框的背面,连接两侧CP的IPU和SPU。
(3)、AMB(AutomaticMaintenanceBus)
自动维护总线,CP通过AMB向MAU报告故障,MAU通过AMB向CP发送命令。
这是两侧CP与MAU之间的连线。
(4)、CTB(CPUTESTBUS)
CPU测试总线,在CP不可用时,MAU完成CPT功能。
这是两侧CP与MAU之间的连线。
(5)、PTB(ProcessorTestBus)
处理机测试总线,连接MAU和IOG。
CPT系统和MAU、IO系统的通信通过PTB来完成。
三、CPS系统
1、CPS系统的组成
CPS包括两个CP处理器(包含CPU、DS、POWC、MAI和STUD等)和相应的软件,这些软件包括管理、程序的执行和引导,内存的分配以及测试等等。
(应用软件也是存储在CP中,并由CP来执行,但从结构的角度来讲,它们是属于APT部分的)
在正常的操作时,APZ软件和APT软件并没有很多交互,但是当存在APZ错误时,例如,一个闭塞的RP或者操作的改变(改SIZE等),就会发生一些APT和APZ之间的交互。
不同的APT功能块彼此通信时通过APZ功能块来处理的,此时APZ功能块只是充当一个管道的功能,并不对传送的内容有任何改动。
CPS跟APZ的其他子系统是紧密相关的,例如在处理器维护时跟MAS子系统,在LOAD软件和DUMP软件时跟IO子系统等。
2、CPS系统的功能
(1)作业执行和数据处理:
根据不同作业优先级来处理,由软件、微程序控制,每条指令对应一段微程序。
(2)FunctionChange:
增加、删除、替换CP内的功能块。
(3)备份处理:
可以备份到CP内存中或者HD。
(4)Loading:
CPLoading、Reloading(自动和人工),内存的重新分配(PS、DS、RS)。
(5)SizeAlteration:
增加或减少数据文件的记录数。
(6)ProgramCorrection:
利用汇编语言,插入或删除程序补丁。
(7)TestSystem:
在不影响话务的情况下,跟踪信号和变量,也用于出厂前的测试。
(8)处理机负荷统计:
LOAS,打印CP负荷命令:
PLLDP。
(9)维护统计:
收集系统状态信息和各种事件信息如Restart次数、Bit-Fault数量、内存大小等。
(10)系统瘫痪时间、临时性、永久性故障等的记录。
指令:
DIRCP
3、CP的状态
(1)、CP的正常状态
当CP处于正常状态时,CP-A:
EXCP-B:
SB/WO
处于正常状态的CP,EX、SB/WO两侧CP执行相同的工作(程序和数据均一致),EX侧控制RP、处理话务,SB/WO侧对两边的CP数据做比较工作,AMU处于“Passive”模式。
(2)、CP的所有状态及其代表的含义
EXEXECUTING:
本侧CP控制话务,对RP有控制权
SB/WOSTANDBYWORKING:
本侧CP与EX侧执行相同的程序和数据、与EX侧热备用工作
接受RP信号同时也向RP发送信号,但RP不读入数据仅作为校验用(检查RPB)
可以无间断的接替执行侧CP的工作
SB/SESTANDBYSEPERATE:
本侧CP执行程序但不与EX侧比较和同步,用于FC。
e.g:
升位、CP初始启动、CPT接入等,控制信号只送分离的RP和分离的终端、被更新后成为SB/WO或直接成为EX侧
命令:
DPSES、FCSEI、PTSES
SB/UPSTANDBYUPDATING:
本侧CP被执行侧更新,目的是保持两侧CP的程序数据一致
通过UMB从执行侧CP把执行数据和程序送入SB侧
中间状态,successful--->SB/WO,unsucessful--->SB/HA
SB/HASTANDBYHALT:
本侧CP停止工作,不执行程序
原因:
永久的硬件Fault、过于频繁的临时故障(芯片不稳定,干扰)
命令:
DPHAS
(3)、CP状态间的转换
CP状态转换图
4、SYSTEMRESTART
系统重启动是指强迫系统从一个已定义好的某一点重新开始执行,系统清除CL型变量,软硬件功能块置初始状态。
重启动并不能消除故障,只是系统试图从故障中恢复运行的方法。
(1)、哪些情况会引起RESTART?
盲选失败
RPB的硬件故障(CP失去了与许多RP的联系)
RPH的硬件故障
软件故障
人机命令:
SYREI:
RANK=,EXPL=;
(2)、系统RESTART的三个级别及其完成的工作:
SMALL:
清除未建立(处于RE)呼叫、不影响已建立呼叫
CL对已建立的呼叫检查Link(指针、BN、GS路径),若发现数据有错,拆除该呼叫
清除作业缓冲区、JobTable
恢复CL型变量的初始值
ResetRPH
LARGE:
除半永久性连接不受影响,拆除所有呼叫,其他同SMALL
RELOAD:
系统对软件故障的最后措施,中断话务10~25分钟,清除所有呼叫,从HD的备份文件中装入程序和数据(重装整个PS、DS和RE型变量),LargeRestart后恢复话务。
Start:
初始启动,在SB/SE侧进行,APZ功能块自动启动,APT功能块由SYATI启动,不扫描EM。
5、系统对软件故障的处理
(1)软件故障的分类
软件故障主要有:
逻辑错误
寻址越界:
信号发给不存在的功能块、SN不存在。
作业缓冲区满
死循环
(2)PHC电路工作原理及软件故障处理
PHC电路实际上是一个加法计数器,CP每隔10ms送一个RESET信号脉冲给PHC,计数器清零;因此若系统正常工作,计数器永远不可能超过60ms(212:
70ms)的限值。
若系统发生故障,就无法送出周期性的RESET信号脉冲给PHC。
计数器超过限值,PHC送PHE信号到AMU/MAU,AMU/MAU命令CP启RESTART或RELOAD
PHCI按键:
按下PHCI按键,PHC的计数器停止计数(为0),PHC就不会送PHE信号给AMU/MAU,AMU/MAU亦不会命令CP启RESTART或RELOAD。
当系统检测到软件故障时,送PROGERROR信号给JOB,JOB进行一些必要的检查后把故障信息通过信号SYRRQ1送给SR,SR保存故障信息到变量OSDATA(H’2),然后执行一段死循环的程序。
此时系统无法定期送出RESET信号脉冲给PHC,PHC电路不断计数,当超过60ms(212:
70ms)的限值时,PHC就认为程序执行出错。
PHC送PHE信号给AMU/MAU,AMU/MAU根据记录要求CP启动某一级别的RESTART。
10分钟内连续发生故障RESTART就会升级。
当系统不断发生故障,PHC电路的计数器每隔一定时间就超过限值,就会周期性地发送PHE信号给AMU/MAU,AMU/MAU就会周期性地命令CP启动RESTART或RELOAD,从而产生循环RESTART或RELOAD。
按下PHCI,循环RESTART或RELOAD停止。
注:
PHC所在功能块:
MPS(APZ211)、MAI(APZ212)
PHCI按键所在板:
MPS(APZ211)、POWC(APZ212)
(3)SYSTEMRESTART过程:
保存CPU(APZ212:
SPU、IPU)寄存器的内容(10~20分钟恢复话务)
EX:
SDP-->RESTART-->EX----->ALARM:
“SYSTEMRESTART”
SB/WO:
SDP-->SB/HA---->SB/UP-->SB/WO
(4)维护人员的处理:
OPI“SYSTEMRESTART”
调整日期:
CACLS:
DATE=,TIME=,DAY=;
并行CP:
DPPAI;
消除告警(AlarmList):
SYRAE;
打印“RESTARTDATA”:
SYRIP;EX侧数据(APZ212)
6、常用的CP指令
SAOSP;可得到CP版本和PS,DS,RS容量
SASTP;可得到内存的容量大小以及分配的情况
DPWSP;普通情况下显示CP状态
PTWSP;显示CP状态的CPT命令
DPSWI;在CP正常工作时,主/备切换
PTSWI;与DPSWI功能相同,为CPT命令
DPPAI;对不正常工作的CP进行并边,使其变成SB/WO(中间会经过SB/UP)
DPSES;使CP由SB/WO|SB/HA|SB/WO_FM变为SB/SE
FCSEI;分离CP的备用侧,是FUNCTIONCHAGNE指令
DPHAS;使CP由SB/WO|SB/SE变为SB/HA(不会在线作)
PTCPL;由分离SP通过分离LINKLOAD分离CP
FCCPL;在分离CP、分离LINK的前提下LOAD分离侧CP
注:
PTCPL和FCCPL作的Load,其APT部分为Passive,在PTSWI/FCSWI前必须用SYATI命令激活其APT部分的块功能
四、MAS子系统
1、MAS子系统的组成
MAS系统由MAU的软件单元和硬件单元组成。
2、MAS子系统的功能
MAS负责监视系统、检测系统故障,对故障进行诊断、测试、定位,产生告警,隔离故障,力求使系统故障影响减少到最少程度,以维持系统正常地不间断地运行。
此外还对故障修复提供指导。
MAS的基本功能是监视和控制两边CP,通过接收CP硬件和软件的错误信号,并诊断分析错误信号以定位故障,进行故障的修复,同时产生告警。
MAS同时提供CPT系统,以使操作者在普通IO无法操作时(如初始化系统或系统因故障而停止运转)可以跟系统联系上。
CPT系统同时可以处理中央软件的软件错误。
一般情况下,指令的输入是从IO系统通过一条RPBUS发送到CP来完成的。
相对应的,CPT也使用了连接MAU和IO系统的一条BUS线。
IO系统上的AT终端可以通过这条BUS跟CP通信。
操作模式是在CPT的通信模式下,这种模式下只有一些符合人机语言的指令和打印输出能够完成。
其中一些CPT指令是用来测试、追踪和起CP的。
进入CPT的方法有两种:
a、用LOCALCABLE通过LOCALPORT连接到系统,然后执行PTCOI连接到CPT系统。
b、在普通终端用MCLOC:
USR=SYSTEM,PSW=INIT;进入LOCALMODE,然后执行PTCOI进入CPT系统。
退出CPT时执行PTCOE即可。
常用的CPT指令有
PTAMR;RESETMAU
PTITI;测试CP
PTCPL在分离CP、分离LINK的情况下LOAD分离的CP边。
3、CPFAULT的常见处理
(1)、CPFAULT分类
永久性错误(Permanent)电路或器件引起,Updating不能恢复
临时性错误(Temparary)由静电干扰引起,Updating可恢复
(2)、CP故障检测方法:
a、MATCHING电路
b、专用电路监视(电压、校验位、地址、时钟)
c、对专用电路测试(例行、固定时间间隔)
(3)、对CPFault的处理
REPCI;检测CP故障,按可能性列出框和板。
REMCI:
MAG=,PCB=;人工干预,是动CP硬件的前提,参数由上面REPCI的结果得到。
执行完后可得出处理流程,然后进行关电,换板等处理。
RECCI;检查处理结果,如果不成功则重复执行REMCI,对REPCI列出的第二种可能的坏件进行操作。
REPCE;中断修复过程。
五、RPS子系统
1、RPS子系统的组成
RPS子系统包括RPH(RegionalProcessorHandler)、RPS(Regional
ProcessorBus)和为了满足用户接入控制的需求而产生的各种各样的RP。
RPH接口是从CP开始的第一个RPS单元,其主要任务是提供RPBUS的连接口,以临时存储来往CP的信号信息,并把信号送到RPBUS上。
RPB是连接RP和两边CP的总线,有串行RPB和并行RPB两种,分别称为RPB-S和RPB-P。
RPB的一边是连接RP,另一边则接在RPH上。
每条RPB可以输送的信令信息都是遵从通信协议的。
RP是设计来执行一些常用功能的,主要用于直接控制应用系统的硬件单元。
EM(EXTENSIONMODULE)是被定义为设备的一群用户或接入中继。
一个EM是可以被系统定义和删除的最小的控制单元。
2、CP、RP、EM之间的关系
CP、RP、EM三者间的关系,可以简单的说是CP控制RP,RP控制EM。
CP、RP和EM的连接示意图
CP、RP和EM之间的比较如下:
名
称
CP
RP
EM
功
能
复杂工作,
系统核心
常规工作,
协助CP
最小单元,软件
每次处理一个
级
别
最高
受控于EXCP,
控制对应的EM
受控与对应RP
工作
方式
热备用,
并行工作
RPTWIN,
负荷分担
逐一控制(除GS)
软
件
中央软件,
开局装入
局域软件,解闭时
由CP装入
为接口,有RP
控制
产生
影响
整个系统
本RPs内的设备
EM内的设备
容
量
32*RPs/RPB
16*EMs/RP*3
EM容纳的设备
和其类型有关
与设备
关系
控制不同的设备
控制不同的设备
(须装入其软件)
同种设备
3、CM的概念
RP以RSU(RegionalSoftwareUnits)的形式LOAD入应用码,同类设备集成群以EM为单位被相同的RSU控制。
那部分的RSU码控制了EM和相对应的数据,这些对应的数据就是CM。
到达RP的信号,通过RP地址和CM号来选择对应的RSU,RP中存储的对应程序的数据对每个CM都是唯一的,但是程序代码可以被一些CM共享(即一个CM只能对应一个SUID,但是一个SUID可以同时对应多个CM)。
对大多数RP类型来说,同一RP不同CM之间的交互是不可能的,而不同RP之间的信号交互则是决不允许的。
通常每个CM对应一个EM,每个EM对应一个硬件单元。
RP内有CM0-CM31共32个CM,每个CM分配一项工作:
CM0-CM15分配给EM0-EM15(不严格对应)
CM16REXR用于故障恢复
CM30TERTRTestSystem/Trace用
CM31RPFDR用于检测RP运行情况(RPD为RPFDR和RDEXR两个,这些在RPLoad时要设)
4、RPS的功能
RPS实现两个功能:
支撑功能和维护功能
支撑功能包括LOADING、FUNCTIONCHANGE、TESTANDCORRECTION。
维护功能包括管理、检错、恢复、告警、修理、诊断、启动/重启动和重启备份等。
5、RP的类型
RP的类型主要有如下几种:
(1)、RPS-1包括RP1和RWMRP等。
(2)、RPS-2包括RP2、RPD、RPG等。
(3)、RPS-M包括STC、STR、RPBC、EMRP和EMRPD等。
(4)、串行RP,包括RP4/H、RP4/F、RPP、RPG2和RPV2等。
其中,前三种是并行的RP,第四种是串行RP。
在这些RP中,RPD、RPG、RPG2这几种RP是要先解闭EM再解闭RP的,其余的RP都是先解闭RP后才能解闭EM。
另外,在现有的RP中,有些RP是不用接RPB的,如RPP、RPG等,它们通过背板连线接到接口RP去,通过这种手段来接受CP的控制,此时接口RP主要起控制、维护的作用。
不管是那种RP,每个CP所能处理的RP数都是由其RPB的数目决定的,每条RPB可以带32个RP。
21225的CP可以带16条RPB,所以可以处理512个RP,21220/30/33都可以带32条RPB,都可以处理1024个RP。
6、串行RPB和并行RPB的区别
RP分为并行RP和串行RP两种。
并行RP对中每个RP都有一对RPB跟两边CP相连,同时跟两边CP进行通信,但只接收一侧CP的指令。
并行RP的寻址是根据其RPB的编号和地址插头的编号来确认的。
并行RP跟CP相连的总线就是RPB-P。
并行RP跟并行RPB与CP的连接示意图
串行RP对中每个RP只有一根RPB跟CP相连,只跟一边CP进行通信,接收一边CP的指令。
RP对间的通信通过背板的连线完成。
串行RP的寻址是通过每个框的地址板和RP板本身在机框中的时隙号来决定的。
串行RP跟CP相连的总线就是RPB-S。
串行RP跟串行RPB与CP的连接示意图
从上面两个连线图,我们也可以看出,与采用并行RPB的CP相比,采用串行RPB的CP多了CP间相互交叉连接的总线,这是因为串行RP只与一边CP通信,而另一边的CP要获取RP的信号就只有通过这些总线了。
由于串行RP只与一边CP通信,所以串行RP比并行RP的传送性能高出一到两倍。
由于RPB连线的不同,所以RPH板也有所区别,串行RPBUS板为RPIRS-S板,并行RPBUS板为RPIRS-P板,串行RPBUS板上可连接4条RPBUS,并行RPBUS可连2条RPBUS,由下往上数,两个口为一条RPBUS,一进一出。
串行RPBUS板上还有两个CROSSCONNECT口,并行RPBUS板上没有。
这里再特别提出并行RP的寻址问题。
每根RPB可以带32个RP,RPB的编号是从0开始的,RP的编号也是从0开始的,也就是说第一根RPB带的RP,其编号是从0~31,
 升级会员
升级会员 