基于LMS算法的自适应滤波器设计Word格式.docx
《基于LMS算法的自适应滤波器设计Word格式.docx》由会员分享,可在线阅读,更多相关《基于LMS算法的自适应滤波器设计Word格式.docx(6页珍藏版)》请在冰豆网上搜索。
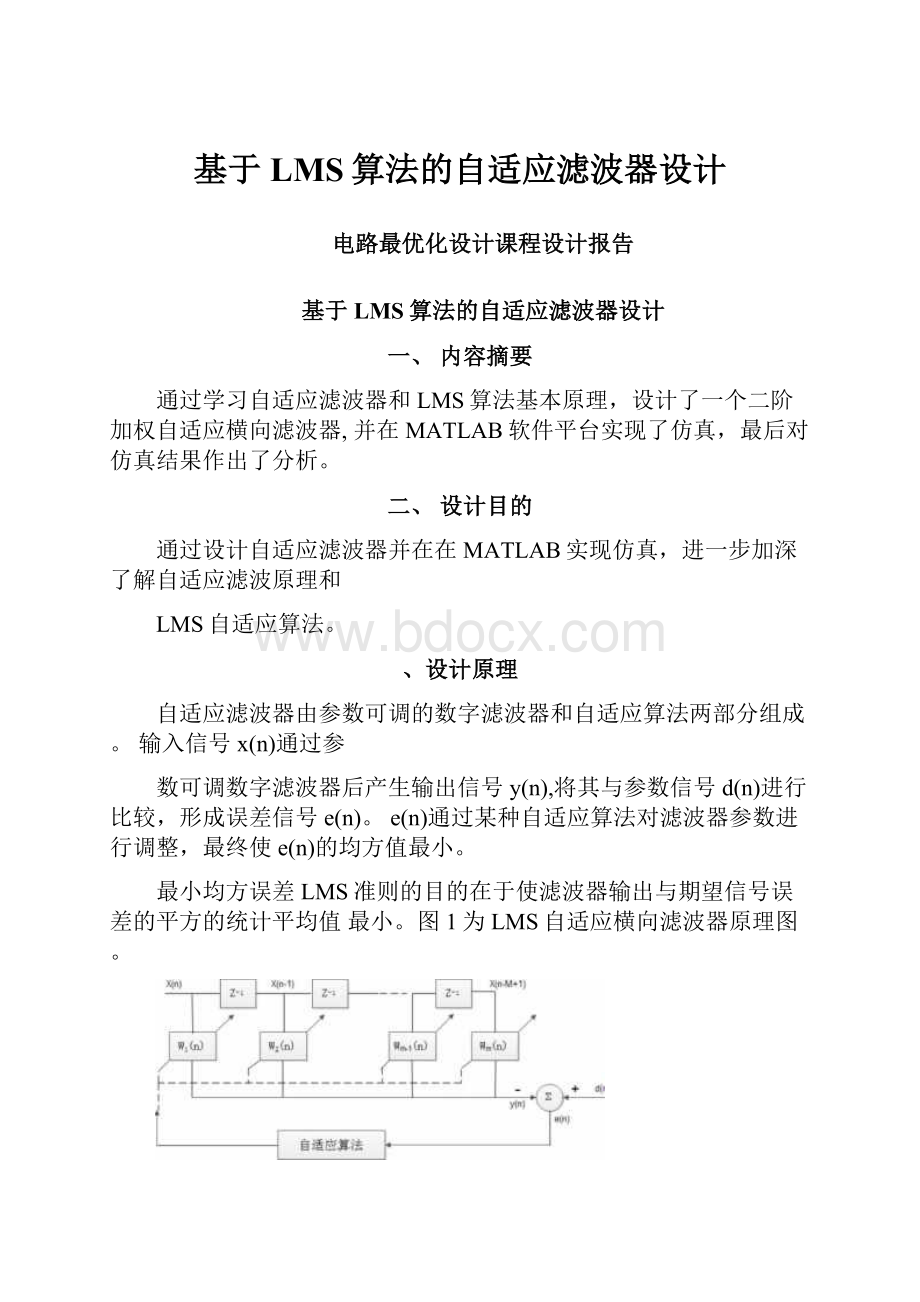
图1为LMS自适应横向滤波器原理图。
图1LMS自适应横向滤波器原理图
改自适应滤波器的输入矢量为:
X(n)=[x(n)x(n-1)…x(n—m-1)]T
(1)
加权矢量为:
W(n)=[W1(n)W2(n)…Wm(n)]丁
(2)
滤波器的输出为:
M
y(n)='
wi(n)x(n-i亠1)=WT(n)X(n)=XT(n)W(n)(3)
i土
y(n)相对于滤波器期望输出d(n)的误差为:
e(n)=d(n)-y(n)=d(n)-WT(n)X(n)(4)
根据最小均方误差准则,最佳的滤波器参量应使得性能函数均方误差f(W)二In)=E[e2(n)]为最小,上式称为均方误差性能函数。
假定输入信号x(n)和期望相应d(n)是联合平稳过程,那么在时刻n的均方误差是加权矢量的二次函数,其表达式为:
'
(n)=E[d2(n)—2PTW(n)WT(n)RxW(n)](5)
式中:
E[d(n)]是期望响应d(n)的方差;
P=E[d(n)X(n)]是输入矢量X(n)和期望响应d(n)的互相矢量;
Rx=E[X(n)XT(n)]是输入矢量X(n)的自相关矩阵。
均方误差是权向量的二次函数,是一个上凹的抛物面,具有唯一的最小值,调解权向量
使得均方误差最小,相当于沿抛物面下降寻找最小值。
用梯度法求该最小值,对权向量W
求导得到均方误差的梯度为:
.£
冗沐£
T心
[]=2RxW-2P(6)
:
W:
-'
2j--M
在性能曲面上最佳权向量Wopt对应点的梯度等于零,即:
2RxW°
pt—2P=0(7)
该方程是正则方程,由此解出最佳权向量Wopt二Rx」P称为维纳解。
Rx和P,而且还
利用上式求解,需要精确地知道输入信号和期望信号的先验统计知识要对矩阵求逆运算。
最陡下降法可避免求逆运算,它通过递推的方式寻求加权矢量的最优值,
是LMS算法的理论基础。
首先设置一个W的初值W(0),沿E减小的方向调整W可以找
到Wpt。
因为梯度方向是E增加最快的方向,所以负梯度方向就是E减少最快的方向。
最小均方算法是一种简单的估计梯度的方法,其突出特点是计算量小、易于实现,且不
要求脱线计算。
其关键技术在于按照e(n)及各x(n)值,通过某种算法,确定E[e2]为最小
时的各h(n)的值,从而自动调节各h(n)值至h(n)值。
LMS核心算法是使用平方误差代替均方误差,即
222
点e(n)Se(n)Se(n)
(n)”[](8)
更0更1和N
所以
;
e(n)/c、
■=2e(n)2e(n)x(n)(9)
将上式代人最陡下降法迭代计算权矢量的公式得:
-■(n•1)-(n)宀(-、(n))(10)
则LMS算法的基本关系式为:
-■(n•1)=-(n)-2.Le(n)x(n)
其中□是收敛因子,决定收敛速度及稳定性,口
满足0<卩<1/入max,入max是Rxx的最大特
征值,Rxx=E[X(n)XT(n)]。
四、导入仿真软件
1、仿真思路
设计一个二阶加权自适应横向滤波器,对一个正弦信号进行滤波,设置不同的收敛因子
□,由MATLAB^序图形观察滤波效果。
2、程序代码
%初始化
clearall;
fs=10000;
t=0:
1/fs:
1;
sn=sin(2*pi*t);
%产生初始信号
n=randn(size(t));
%产生高斯噪声
xn=sn+n;
%信号加噪声
w=[00.5];
%设置初始值
u=0.00026;
%设置收敛因子
fori=1:
length(t)-1
y(i+1)=n(i:
i+1)*w:
%噪声通过滤波器输出y
e(i+1)=xn(i+1)-y(i+1);
%e为原始信号加噪声的期望减去滤波器输出的噪声yw=w+2*u*e(i+1)*n(i:
i+1);
%权的变化公公式
end
subplot(3,1,1)
plot(t,xn)%输出信号加噪声图形
title('
带噪声原始信号'
)
grid;
subplot(3,1,2)
plot(t,sn)
原始正弦信号'
subplot(3,1,3)
plot(t,e)
滤波结果'
3、仿真结果
图2卩=0.00026时正弦加噪信号的滤波
图3卩=0.0026时正弦加噪信号的滤波
图4卩=0.0026时正弦加噪信号的滤波
图1设置的收敛因子为0.00026,图2设置的收敛因子为0.0026,图3设置的收敛因子为0.026。
五、结果分析
□的大小影响算法的收敛速度,卩值小,收敛速度慢,计算工作量大,但滤波性能较好。
卩值大,收敛速度快,计算工作量小,滤波性能较差。
但当卩>1/入max时,系统发散,收敛
速度不明显,且取值过多,会造成计算溢出。
所以,对□的选择应综合整个系统考虑,在满
足精度要求的基础上,尽量减少自适应时间。
参考文献
1、《优化方法与电路优化设计》,东南大学出版社,鲍顺光,1991;
2、《电路与系统分析-使用MATLAB,高等教育出版社,赵录怀,杨育霞等,2004;
3、《电路的计算机辅助分析-MATLAB与PSpice应用技术》,戚新波,刘宏飞等,2006;
4、《电子技术基础(模拟部分)(第四版)》,清华大学出版社,康华光,2000。
 升级会员
升级会员 