机器人实验活动记录教学内容Word格式文档下载.docx
《机器人实验活动记录教学内容Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《机器人实验活动记录教学内容Word格式文档下载.docx(18页珍藏版)》请在冰豆网上搜索。
动
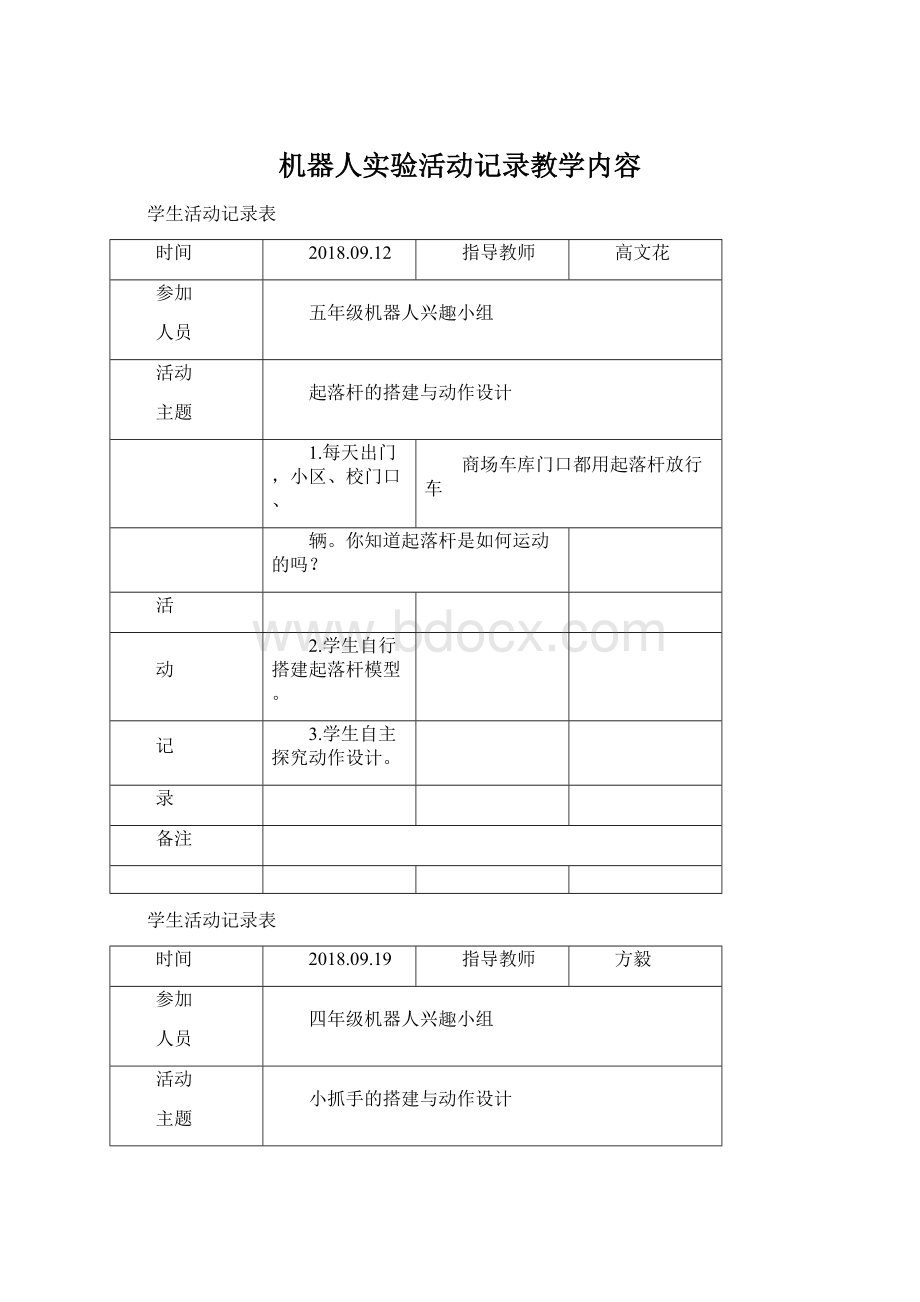
2.学生自行搭建起落杆模型。
记
3.学生自主探究动作设计。
录
备注
2018.09.19
方毅
四年级机器人兴趣小组
小抓手的搭建与动作设计
1.知道运动系统是由控制系统、执行系统、动力系统传动系统
组成。
2.小抓手的执行系统是那部分结构?
3.学生自行搭建起落杆模型。
4.学生自主探究动作设计。
5.学生模型动作设计展示。
2018.09.26指导教师高文花
高尔夫球杆模型搭建与动作设计
活动记录
1.认识牛顿第一定律和惯性定义。
2.学生自主模型的搭建。
4.学生模型动作设计展示。
5.学生模型动作设计比赛。
2018.10.11
小象鼻模型搭建与动作设计
1.描述大象的鼻子形状,以及大象鼻子的动作与功能。
2.认识机器人的自由度数目是指操作系统中关节的数目。
3.小象鼻中自由度有哪些,有多少自由度。
4.学生自主模型的搭建。
5.学生自主探究动作设计。
6.学生模型动作设计展示。
7.学生模型动作设计比赛
时间2018.10.19指导教师高文花
五年级机器人兴趣小组人员
一、点名记录考勤。
二、简单提问
1•思考蜗牛是如何运动的,为什么蜗牛蠕动会前进?
三、简述知识点,搭建模型,程序设计。
蜗牛的整个躯体包括眼、口、足、壳、触角等部分,身背螺旋形的贝壳,其形,颜色大小不一,它们的贝壳有宝塔形、陀螺形、圆锥形、球形、烟斗
形等等。
现国内养殖的白玉蜗牛、盖罩大蜗牛、散大蜗牛、亮大蜗牛、褐云玛瑙蜗牛等都有自己独特的外形。
蜗牛的眼睛长在头部的后一对触角上。
蜗牛在爬行时,还会在地上留下一行粘液,这是它体内分泌出的一种液体,即使走在刀刃上也不会
有危险。
搭建完成后,进行程序编写,最后让同学们进行一次蜗牛比赛,看谁做的蜗
牛跑的最快,发现有同学快有的慢,这是什么原因。
讲解为什么速度不同,因为摩擦力大的速度就快,我们发现主控盒装的位置是蜗牛的背壳”为什么呢?
因为决
定摩擦力大小的因素是接触面积材质和压力。
然后继续改装,再去比赛。
然后我
们把后腿的材质换成橡胶的。
速度会变得更快。
四、观察与思考
1、蜗牛的运动时间。
2、摩擦力对蜗牛运动速度的影响。
五、拓展讨论
把自己的机器人装饰的更漂亮。
1
2018.10.25
蛇的模型搭建与动作设计
1•点名记录考勤。
2•简单提问
1、同学们见过蛇吗?
2、蛇是如何行走的。
3•简述知识点,搭建模型。
蛇是四肢退化的爬行动物的总称,
属于爬行纲蛇目。
正如所有爬行类一样,蛇
类全身布满鳞片。
所有蛇类都是肉食性动物,部分有毒,但大多数无毒。
目前全球
总共有3,000多种蛇类。
蛇身体细长,四肢退化,无可活动的眼睑,无耳孔,无四肢,无前肢带,身体表面覆盖有鳞。
蛇类是变温动物,体温低于人类,又被称为冷血动物,当环境温度低于15C时,蛇会进入冬眠状态。
部分有毒,但大多数无毒。
另外部分蛇是卵胎生动物。
搭建出的蛇模型,它不能够移动前行,只能做些摆出相应的动作姿势。
4•观察与思考
3、观察下我们的模型有多少个自由度。
4、蛇行走的外形是怎样的。
5•探究拓展
时间2018.11.01指导教师高文花
2•简单提问。
章鱼是不是鱼类的一种吗?
3•简述知识点,搭建模型。
软体动物是无脊椎动物中数量和种类都非常多的一个门类,已经发现的现
代种类加上化石种类一共有12万种,仅次于节肢动物而成为动物界中的第二
大门类。
软体动物适应力强,因而分布广泛,陆地、淡水和咸水中都有大量成员,像蜗牛、河蚌、海螺、乌贼等都是我们熟悉的代表。
各类软体动物虽然形态各异、习性有别,但是基本特征十分相似,身体柔
软而且大多数都不分节,一般都分为头、足、内脏团和外套膜4个部分。
外套
膜通常还都分泌出钙质的硬壳保护在身体的外面。
由于外套膜形状因种类而异,不同种类的软体动物的硬壳外形也就各种各样。
让同学们上台介绍自己对章鱼的认识。
章鱼(Octopus):
为章鱼科26属252种海洋软体动物的通称。
为头足纲最大科,可分为深海多足蛸亚科。
为温带性软体动物,生活在水下,适应水温不能低于7C,海水比重1.021最为适宜,低盐度的环境会死亡。
搭建出章鱼模型,设计其动作,让小章鱼跳起舞来。
4.学生模型搭建与动作设计比赛。
2018.11.8
搬运机器人模型搭建与动作设计
2•引课。
知识讲堂
3•搭建模型和动作编程。
根据APP的3D动态指引完成机器人的搭建。
简单的动作设计。
步态的分析,舵机角度值的影响
动物奔跑和行走的姿态分析,舵机角度的关系。
5•拓展讨论
2018.11.15
小矮人模型搭建与动作设计
二、简单提问。
1•扫地机器人外观并不像人或动物,但它仍然是机器人,那么,汽车是不是机
器人呢?
\
2•人型机器人应该如何定义呢?
三、简述知识点,搭建模型。
双足机器人是指用两条腿行走的机器人,与其他轮式或履带式机器人相比,双足机器人几乎可以适应所有复杂地形,还能跨越障碍。
当然双足机器人也有一定
的缺点,如由于重心原因较容易侧翻,且运动速度远远低于其他行走方式。
搭建过
程团队合作,搭建小矮人机器人。
5、小矮人有四舵机控制,分别是机器人的哪些关节的控制。
6、小矮人左右两边对称。
7、把自己的机器人装饰的更漂亮。
六、课堂总结
1、学到了什么。
2、对自己改装后的作品满意度如何。
3、老师总结:
认识人形机器人及人形机器人的结构分析,。
4、整理教具。
2018.11.22
5.每天出门,小区、校门口、
6.学生自行搭建起落杆模型。
7.学生自主探究动作设计。
2018.11.29
4.知道运动系统是由控制系统、执行系统、动力系统传动系统
5.小抓手的执行系统是那部分结构?
8.学生自主探究动作设计。
2018.12.06指导教师方毅
3.认识牛顿第一定律和惯性定义。
2018.12.13
4.描述大象的鼻子形状,以及大象鼻子的动作与功能。
5.认识机器人的自由度数目是指操作系统中关节的数目。
6.小象鼻中自由度有哪些,有多少自由度。
时间2018.12.20指导教师方毅
四年级机器人兴趣小组人员
2018.12.27
3、同学们见过蛇吗?
4、蛇是如何行走的。
5、观察下我们的模型有多少个自由度。
6、蛇行走的外形是怎样的。
时间2019.01.03指导教师方毅
2019.01.10
2019.02.28
7、小矮人有四舵机控制,分别是机器人的哪些关节的控制。
&
小矮人左右两边对称。
9、把自己的机器人装饰的更漂亮。
七、课堂总结
 升级会员
升级会员 