自动控制原理大作业Word文档格式.docx
《自动控制原理大作业Word文档格式.docx》由会员分享,可在线阅读,更多相关《自动控制原理大作业Word文档格式.docx(11页珍藏版)》请在冰豆网上搜索。
Thesystemismainlytosolvetheproblemofconstanttemperatureboxautomaticcontrolsystemstructurediagramanalysis,drawthestructurediagram,calculatethetransferfunction.Intheconstanttemperatureboxautomaticcontrolsystembasedonthesimulation,inthecontroller,actuatorselection,objectmodelingandanalysisoftimedomainandfrequencydomainandotheraspectsofacomprehensive,integratedanalysis,andcarriesonthefrequencydomaincorrectionsystem,aimingattheexistingproblemstofindasuitablesolution,constructingacalibrationnetworkcircuit,therebyenablingthesystemtotomeettherequirementsofperformanceindex.
Keywords:
gaintransferfunctionofthesystemfrequencydomainanalysisfrequencydomaincorrection
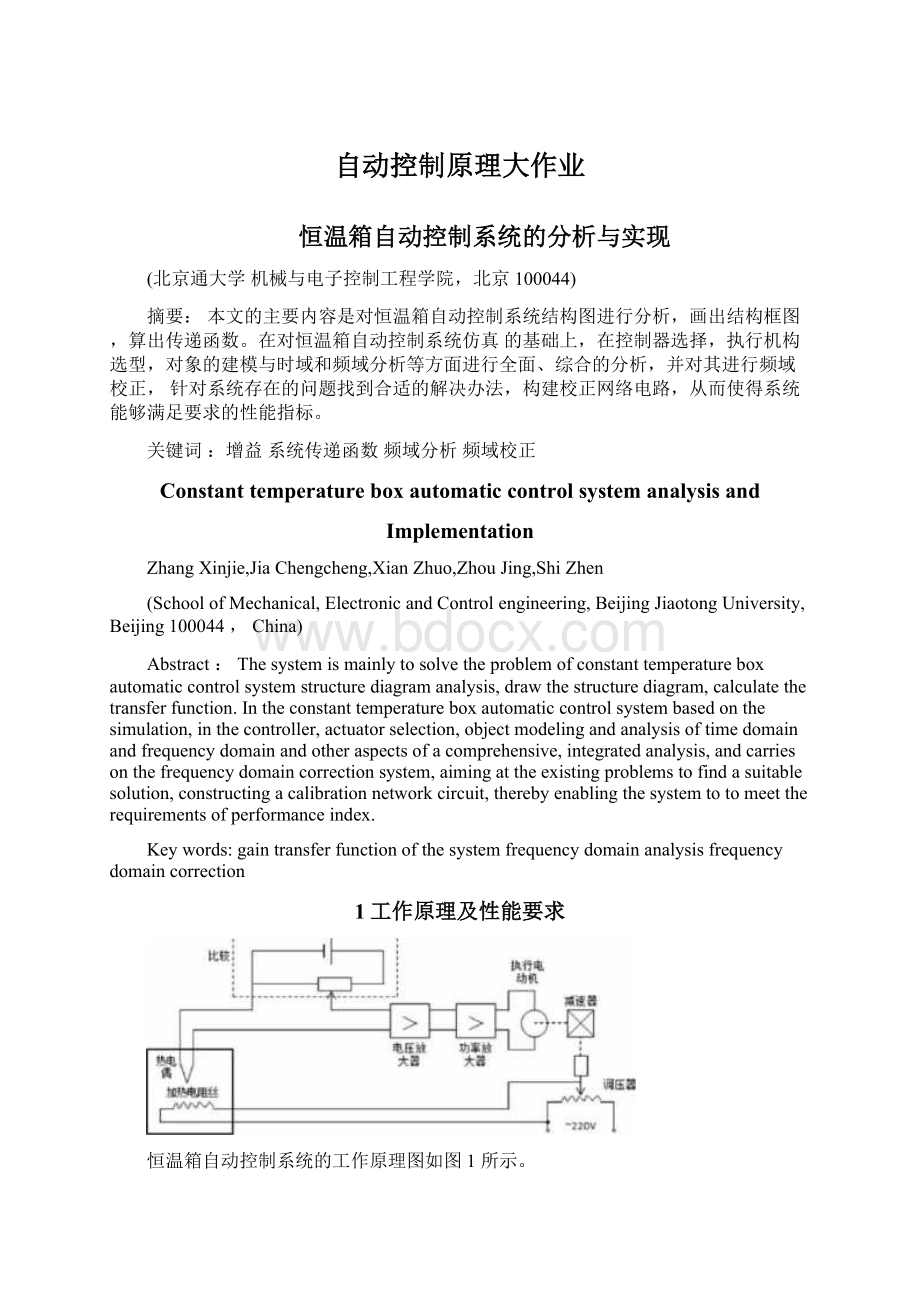
1工作原理及性能要求
恒温箱自动控制系统的工作原理图如图1所示。
图1恒温箱自动控制系统的工作原理图
恒温箱实际温度由热电偶转换为对应的温度值。
恒温箱期望温度由电压给定,并与实际温度比较得到温度差,即为温度偏差信号。
温度偏差信号经电压、功率放大后,用以驱动执行电动机,并通过传动机构拖动调压器动触头。
当温度偏高时,动触头向减小电流的方向运动,反之加大电流,直到温度达到给定值为止。
此时,偏差,
电机停止转动。
这样便可实现自动控制温度恒定的性能要求。
控制系统中各环节及参数如下:
(1)直流电机:
励磁线圈电阻Ω,电感,扭矩常数,
图2电压放大电路
3)功率放大电路:
功率放大电路如图3所示
图3功率放大电路
4)调压器电路:
调压器电路如图4所示
图4调压器电路
要求系统相位裕量为,过渡过程的调节时间不超过2秒,超调量不超过3%。
2
系统数学模型的建立与传递函数的求解
系统方框图
图5恒温箱自动控制系统的组成框图
传递函数的求解电压放大电路传递函数
经简化后的电压放大电路如图
6所示,由电压放大电路图可列出等式如公式
(1):
由此求的传递函数为如公式
(2):
(2)
则得到电压放大电路的传递函数如公式(3):
图6电压放大简化电路图
功率放大电路传递函数
(4)
调压器传递函数
调压器为自耦变压器,其简化电路图如图8所示,则其匝比就是其传递函数如公式(5):
图8调压器简化等效电路图
电动机传递函数
执行电机的电路图如图9所示。
电枢回路电压平衡方程如公式(7)
(7)
式中是电枢旋转时产生的电势,其大小与激磁磁通成正比,方向一样电枢电压相反,即,是反电势系数。
电磁转矩方程如公式(8)
图9执行电机电路图
式中,是电机转矩系数;
是电枢电流产生的电磁转矩。
是电动机和负载折合到电动机轴上的转动惯量。
电动机轴上的转矩平衡方程如公式(9)()
式中,是电动机和负载折合到电动机轴上的粘性摩擦系数;
消去中间变量,及,便可得到以为输出量,为输入量的直流电动机微分方程如公式(10):
在工程应用中,电枢电路电感La较小,通常忽略不计,因而上式可简化为公式(11)
定义,于是有公式(13)
(13)
图是它的方框图图10:
Uts
Km
ms
sTms1
图10执行电机系统方框图
根据题目所给条件得到电机传递函数如公式(14):
(14)
减速器部分传递函数
减速器部分为典型的比例环节,传递函数可直接得出。
其中j为减速器传动比。
由已知可得到公式(15):
系统总传递函数及框图
系统框图如图11所示。
图11系统方框图由以上所求各部分的传递函数可得到本系统的总传递函数如公式(16):
(16)整理得公式(17):
(17)
其中,为开环增益,根据系统参数,可计算得。
3系统时域和频域分析
待校正系统传递函数如公式(18):
系统时域分析:
画出时序函数图像如图12,闭环传递函数为
序图与仿真图
根据图像,可以得出调节时间为,超调量。
所以,该系统没有达到预定要求。
为了分析对系统的影响,分别绘制出时的单位阶跃响应时序图,如图13,其中,开环传递函
数为
图13不同单位阶跃响应时序图
由图分析可得,随着不断增大,调节时间不断增大,超调量也不断增大,但对于I型系统稳态误差减小;
随着不断减小,超调量减小,调节时间减小,但是稳态误差增大。
因此,为了改善系统的性能参数,单纯地增大或者减小是不可取的。
系统频域分析:
然后,画出待校正系统的对数幅频特性bode图,如图14所示。
图14系统伯德图
从图中可以得出,系统穿越频率为,对应的相角为,由此可以得出系统相位裕量为因此,对于相位裕量,系统不能达到预定要求,要进行校正。
系统根轨迹:
系统的开环极点分别为0,,-556,绘制出其根轨迹如图15:
图15系统根轨迹图
可见,系统在时均是稳定的,但是随着不断增大,系统稳定裕量不断降低,系统趋于不稳定的趋势越高。
4系统的校正
校正过程如下:
(1)选择新的穿越频率
从伯德图上可以看出,当时,相位移为,此时系统有45°
的相位裕量。
这样,选择,
可采用滞后引前校正电路进行校正。
(2)确定滞后引前校正电路相位滞后部分
设交接频率为,选择在穿越频率的十分之一处,即,并且选择,则交接频率,
,所以,滞后-引前校正电路相位滞后部分的传递函数可写成
(3)相位引前部分的确定
因为新的穿越频率,从原传递函数伯德图可以求出。
因此,如果滞后-引前校正电路
在处产生的增益,则即为所求。
据此,通过点(s,—36dB)可以画出一条斜率为20dB/十倍频的直线与0dB线及-20dB的交点,就确定了所求的交接频率。
故得相位引前部分的交接频率,
。
所以引前部分的传递函数为
(4)滞后—引前校正装置的传递函数为
(5)校正后系统的开环传递函数为:
(6)校正系统时域分析
如图16所示,用试探法从图中可以测量得,系统超调量为34%,相比之前有了很大的改进,调节时间小于2s,
满足系统要求。
图16校正系统时序图
(7)校正系统频域分析
校正系统bode图和根轨迹图见图17。
由伯德图可知,系统相位裕量为在范围内,故满足要
求。
图17校正系统频域图
8)系统最终开环传递函数
系统经过滞后—引前校正后的开环传递函数为
 升级会员
升级会员 