履带机器人使用说明书Word文件下载.docx
《履带机器人使用说明书Word文件下载.docx》由会员分享,可在线阅读,更多相关《履带机器人使用说明书Word文件下载.docx(61页珍藏版)》请在冰豆网上搜索。
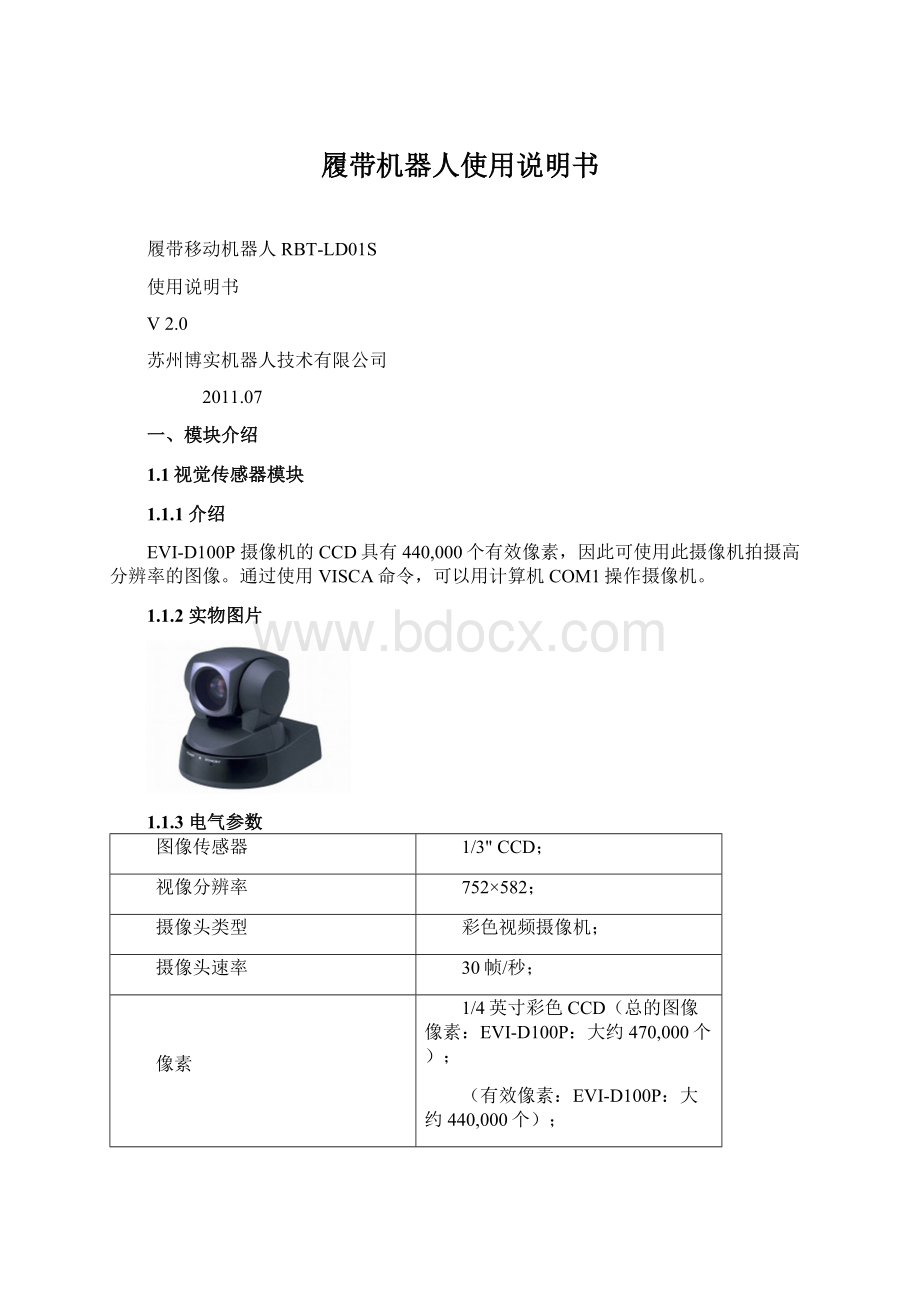
视频输出
RCA拾音插座
(1),1Vpp,75欧姆,未平衡同步:
负极性;
S视频输出
4芯微型DIN
(1);
输入/输出控制接口
RS-232C:
(输入:
1,输出:
1)8芯微型DIN9600bps数据:
8bit停止位:
1;
电源接口
JEITA4型;
输入电压
DC12V(DC10.8至13V);
电流消耗
1.1A(12V直流输入时);
功耗
13.2W;
工作温度
0℃至+40℃;
贮藏温度
-20℃至+60℃;
外形尺寸
通讯型彩色摄像机:
113×
120×
132mm(宽/高/深);
重量
880g遥控器:
109g;
安装角度
与水平面所成角度为±
15度;
1.1.4外接示意图
接口11VISCAIN(VISCA插入)插孔定义:
1.1.5通讯协议
详细通讯协议请见:
EVI-D100摄像机技术手册.pdf;
其演示DEMO程序请见:
D100_v001E-云台测试程序文件夹;
VC编程动态链接库源程序请见:
云台库文件夹;
1.2激光传感器模块
1.2.1介绍
激光传感器模块采用URG-04LX-UG012维激光扫描测距仪。
HOKUYO公司URG-04LX-UG012D激光扫描测距产品拥有5.6m,240°
测量范围,DC5V输入(USB接口供电),100ms扫描时间,可用于机器人避障和位置识别;
高精度、高分辨率、宽视场设计给自主导航机器人提供了良好的环境识别能力;
紧凑型设计节约了安装空间,低重量、低功耗;
不受强光影响,在黑暗中亦能工作;
非接触式测量;
✓低成本、宽视场,非常适用于机器人在未知的环境中自主移动
✓紧凑型设计可节约安装空间,轻重量和低功耗可节约更多的能源,使工作时间更长
✓非接触式测量视场范围内的物体尺寸和位置
✓5.6m测量距离
1.2.2实物图片
1.2.3电气参数
电压
5VDC±
5%(USB总线供电)
激光光源
半导体激光二极管(λ=785nm),激光安全等级1
(IEC60825-1,21CFR1040.10&
1040.11)
测量距离
20to5600mm(whitepaperwith70mm),240°
精度
60to1,000mm:
±
30mm
1,000to4,095mm:
3%测量距离
角度分辨率
0.36°
(360°
/1,024steps)
扫描时间
100msec/scan
噪音
<
25dB
接口
USB2.0/1.1[MiniB](FullSpeed)
指令系统
专用指令SCIPVer.2.0
环境温湿度
-10to+50degreesC,<
85%RH(无凝露)
环境亮度
Halogen/MercuryLamp:
10,000Luxorless,
Florescent:
6000Lux(Max)
振动
双振幅1.5mm10to55Hz,每轴2个小时
冲击
196m/s2,10次,X,Y,Z方向
约160g(包括电缆)
注:
-户内使用
-在系统启动时,传感器需要500mA,必要时,请用2个USB接口去连接。
如果接口不能够提供500mAx2,PC电脑接口有可能损坏
1.2.4工作示意图
1.2.5安装示意图
1.2.6使用说明
URG-04LX-UG012D激光扫描测距的驱动程序见URG_USB_DRIVER_Win.zip,演示程序见UrgViewer.zip,详细通讯协议见URG_SCIP20.pdf以及对应的命令测试程序见SCIP2_Command_Test.exe,C语言源程序请见capture_sample.zip。
最新驱动及程序请见网址:
1.3超声传感器模块
1.3.1介绍
智能传感器是基于超灵敏的6500测距模块板的增强型600系列静电传感器序列,新的电压控制电路可使传感器工作在6~24VDC的电源下。
TTL谐调集电极开路输出包括上拉电阻,新的振荡电路的配置可以使该单元外部触发,也可以在5Hz的频率下连续感应。
数控增益和可变带宽放大器可以使器件在声纳应用中降低杂波从而可以进行表面突起检测。
典型绝对精度是满量程读数的±
1%。
✓50KHz静电传感器
✓整合SMT驱动电路
✓TTL谐调
✓方便的终端引脚连接
✓单稳态和非稳态工作模式
✓电压调节
✓波束角度15°
(-6dB)
✓低响应特性
✓量程:
6英寸~35英尺(0.15to10.7m)
✓非常好的接收灵敏度
✓可用于所有600系列传感器
✓以超声波的频率在空气中工作
1.3.2实物图片
1.3.3电气参数
6to24VDC
电流,传输期间
2A
电流,传输后(标称)
55mA
0°
to+40°
C
量程范围
0.15to10.7m
精度(满量程)
0.1%
重复率(非稳态)
5Hz可以外部触发
输出2+(INIT)
+5VDC
输入(TTL谐调)
2+(extINIT)
19克
厚度尺寸、直径、安装直径
0.950英寸、1.700英寸、1.525英寸
1.3.4推荐工作环境
1.3.5外接示意图
引脚
名称
说明
1
电源
需要+6~+30VDC具有100mA电流能力的控制电源,传输过程中具有2A的短脉冲串能力。
电源是供超声点火用的,其他信号则为5VTTL电平;
2
公共端
返回直流电源,TTL输出和时钟信号。
3
回波输出
TTL逻辑电平输出(0-5VDC),当接收到回波信号时改变状态。
4
OSC输出
TTL逻辑电平输出(0-5VDC),内部49,4kHz晶振器输出。
注意:
只有当INIT信号(pin5)是高电平时该脚输出。
5
INIT输入
TTL逻辑电平输入或输出(见“可编程跳线”):
当从低到高变化时初始化一个传输/接收周期,目标探测期间信号必须保持高电平
6
BINH输入
TTL逻辑电平输入:
高电平时可进行多目标探测,正常工作下与pin2脚可连接也可不连接。
7
BLNK输入
当发出一个信号后,输入信号为高电平时重置接收器的阈值,这样可进行多回波检测,正常工作下与pin2脚可连接也可不连接。
可编程跳线
跳线安装后内部5Hz重复率,消除外部INIT输入。
当连接时,内部晶振提供INIT信号,此时INIT管脚输出。
实际机器人使用中,一般使用1、2、3、5脚。
即第5脚置高电平后开始计时,当第3脚检测为高电平后,停止计时,求出时间差,然后计算超声在空气中的传输速度计算距离;
要注意两点:
(1)时间差太小,小于2.38ms,可能是噪声;
(2)不能一直等待3脚为高,因为有可能太差,没有回波产生;
故在计时一段时间之后自动停止此次测量距离;
1.3.6通讯协议
可通过串口COM4获得数据(每个超声传感器一个字节),串口参数:
“4800,N,8,1”,大约每隔200ms自动发送一次数据,数据格式如下:
字节
第1字节
第2字节
第3字节
第4字节
第5字节
第6字节
第7字节
数值
0xFA
0xFB
0xS1
0xS2
0xS3
0xS4
0xFC
包头1
包头2
超声1
超声2值
超声3值
红外值
包尾
所获得的第3、4、5字节是无符号8位二制制数据,范围为:
0~255,表示计时周期数,每个周期数表示0.00025s,例如:
0xS1=0x72(对应十进制是114),则距离=114×
0.00025(周期)×
340(超声速度)/2(来回距离)*1000(换成mm)=4845ms,这样的理论最大精度为1×
340(超声速度)/2(来回距离)*1000(换成mm)=42.5mm
1.3.7使用说明
600系列智能传感器有两个基本工作模式:
单回波模式和多回波模式。
电源(VCC)的应用,开始输入(INIT)的应用,传输的结果,和抑制消隐输入(BINH)的使用在两种工作模式下基本上都是一样的。
加电以后,INIT信号变成高电平前必须至少经过5毫秒,在此期间,所有的内部电路被重置、内部振荡器稳定。
当INIT变为高电平后驱动传感器(XDCR)发出信号。
49.4kHz下16个脉冲从传感器中发出。
16脉冲传输完后,为了最合适的接收工作,传感器中保持200VDC偏压(推荐)。
被检测物反射回的回波传输后为了消除传感器固有的阻尼振荡,测距控制IC的接收输入(REC)在开始信号(INIT)之后通过内部消隐被抑制2.38毫秒。
如果需要减少消隐时间,那么BINH输入变成高电平,这样在内部消隐之前中止接收输入消隐。
这样就可以检测最短1.33英尺的距离(相对于2.38毫秒),另外如果传感器衰减的够快那么返回信号将不被响应。
✓单回波模式
单回波工作模式下(Figure1),所需要做的就是等待传输信号的返回,每英尺的输出和返回大约需要0.9毫秒。
返回信号被放大并作为一个高电平信号输出。
INIT变成高电平和Echo(ECHO)输出变为高电平之间的时间与传感器与测量目标之间的距离是成比例的。
如果需要,当准备下一次传输的时候可以返回一个低电平的INIT信号然后再使它变为高电平,这样就可以使周期重复。
✓多回波模式
600系列智能传感器有一个外部消隐输入,BLNK,在多回波工作模式下可以选择性的排除回波,也可以区分与目标物相隔3英寸的回波。
如果多于一个目标和单传输检测多重回波,那么这个周期有些许的差别(Figure2)。
接收到第一个使ECHO输出变为高电平的返回信号以后,消隐输入(BLNK)必须变成高电平然后再变为低电平,以重置ECHO输出,这样就可以接收下一个返回信号了。
消隐信号在解决所有第一个目标返回的全部16个返回脉冲期间必须至少保持0.44毫秒,并且允许内部延迟时间。
此符合相隔3英寸的两个目标。
✓增益控制和增益调节
INIT变为高电平,一个周期开始,接收放大器增益被非连续性的提高(Figure3),因为传输信号随着距离的增长在衰减。
大约在38毫秒时获得最大的增益。
为了校准增益电位器,将探测目标放置在希望探测的最远距离处。
旋转“增益调节”按钮VR1,顺时针旋到底(CCW),然后慢慢地顺时针旋转“增益控制”(CW)直到探测出现,再旋转“增益控制”CW1/16。
为了可靠测量总是调节“增益控制”到所需的最小增益。
过多地增益可能导致目标探测的失败。
1.4倾角计模块(电子罗盘)
1.4.1介绍
内置两个正交磁场传感器,采用16位A/D转换器,标校后磁场精度一度左右,精度高、稳定性好。
标定和指向修正命令简单有效。
罗盘在平面或者测量面转动一周以后,可以消除周围磁场的固定干扰磁场对指向非正旋的影响,但是干扰磁场过大或者变化情况下,无法消除影响。
对于要求精度的场合,为罗盘提供磁场干扰小的环境是保证精度的必要条件。
1.4.2实物图片
1.4.3电气参数
工作电压
直流电压4.5-5.5V
静态电流
30mA~40mA
-40~85度
响应时间
7次/s
指向精度
典型±
0.5度,最大±
1度
分辨率
0.1度
重复性
0.2度
最大干扰磁场
20Gauss
磁场的测量范围
最大3Gauss
PCB尺寸
圆形,直径35mm
1.4.4外接示意图
插头引脚
+5V
输入电源正极
GND
输入电源地
RXI
串口信号输入
TXO
串口信号输出
GND
NC
保留(悬空,禁止连接任何电平)
1.4.5数据帧格式
字节位置
数据类型
数据内容
字节1
单字节16进制数
“0xAA”
字节2
保留
字节3、4
字节5、6
字节7、8
字节9、10
字节11、12
双字节有符号整数
X轴方向磁场强度
字节13、14
Y轴方向磁场强度
字节15、16
字节17、18
双字节无符号整数
罗盘与真北偏角,转换算法:
整数/100
字节19
字节20
前面所有数据的累加校验和
1.串口COM2获得数据,串口参数:
“9600,N,8,1”,周期大约7帧/秒;
2.字节17和18是双字节无符号整数,如整数是25380,则表示传感器与磁北的夹角为253.8o
1.4.6命令表与命令详解
序号
命令字
含义
1
0xa4
正常输出
2
0xa2
单次命令输出
3
0xa5
进入修正清除模式
4
0xf2
清除磁场和磁北修正参数
5
0xe8
清除磁北修正参数
6
0xe5
当前位置设置为磁北
0xf5
进入磁场修正模式
8
0xf8
停止磁场修正模式
9
0xf7
保存磁场修正结果
✓[0xa4]正常输出
罗盘上电初始状态。
数据帧连续输出,从单次输出命令返回是使用本条指命。
✓[0xa2]单次命令输出
发送命令后,罗盘每接收一条命令,输出一次数据。
✓[0xa5]进入修正清除模式
进入清除磁场和磁北修正,清除磁北修正,当前位置设置为磁北三条命令执行模式。
✓[0xf2]清除磁场和磁北修正参数
清除罗盘的磁场和磁北修正参数记录。
✓5.[0xe8]清除磁北修正参数
清除罗盘的磁北修正参数记录,罗盘的磁场修正记录保留。
✓6.[0xe5]当前位置设置为磁北
当前位置输出为0或360度。
✓7.[0xf5]进入磁场修正模式
进入磁场修正模式后,将罗盘在水平面缓慢转动2圈以上,进行磁场修正。
✓8.[0xf8]停止磁场修正模式
罗盘完成转动后,执行。
✓9.[0xf7]保存磁场修正结果
将磁场修正记录保存,磁场修正完成。
1.4.7使用说明
用户在使用中要减少外界干扰磁场,以提高测量精度。
外界干扰磁场主要由铁磁性物质产生,交变电流也是产生干扰的因素。
拆卸传感器,将破坏出厂标定,降低传感器精度。
1.5红外传感器模块
1.5.1介绍
此款红外传感器模块,又称热释电红外传感器,是基于红外线技术的自动控制模块,采用德国LHI778探头设计,灵敏度高,可靠性强,超低电压工作模式,能检测人或动物发射的红外线而输出电信号的传感器,广泛地应用于各类自动感应设备。
1.5.2实物图片
1.5.3电气参数
直流电压4.5-20V
50uA~65uA
输出电平
高3.3V/低0V
触发方式
L不可重复触发/H重复触发(跳线设置)
感应角度
110°
(小于120度锥角,7米以内)
延时时间
可调(5秒~10分钟)
感应距离
可调(3米~7米)
-15~+70度
32*24mm,螺丝孔距28mm,螺丝孔径2mm,感应透镜尺寸:
23mm(默认)
1.5.4外接示意图和典型应用
可通过串口COM4获得数据(即OUT位的高3.3V或低电平0V),串口参数:
“4800,N,8,1”,大约每隔200ms自动发送一次数据(即每秒5帧数据),数据格式如下:
超声1值
可以通过判断第6字节(每个字节8位)最低位是“0”或“1”来知道红外传感器输出的是低电平还是高电平;
程序示例:
If((0xS4&
0x01)==0x01)
则输出高电平
else
输出低电平
1.5.5感应范围
1.5.6外形与调节
✓调节距离电位器顺时针旋转,感应距离增大(约7m),反之,感应距离减小(约3m);
✓调节延时电位器顺时针旋转,感应延时加长(约300s),反之,感应延时缩短(约5s);
1.5.7使用说明:
✓全自动感应:
当有人进入其感应范围则输入高电平,人离开感应范围则自动延时关闭高电平。
输出低电平。
✓光敏控制(可选):
模块预留有位置,可设置光敏控制,白天或光线强时不感应。
光敏控制为可选功能,出厂时未安装光敏电阻。
✓两种触发方式:
L不可重复,H可重复。
可跳线选择,默认为H。
A.不可重复触发方式:
即感应输出高电平后,延时时间一结束,输出将自动从高电平变为低电平。
B.可重复触发方式:
即感应输出高电平后,在延时时间段内,如果有人体在其感应范围内活动,其输出将一直保持高电平,直到人离开后才延时将高电平变为低电平(感应模块检测到人体的每一次活动后会自动顺延一个延时时间段,并且以最后一次活动的时间为延时时间的起始点)。
✓具有感应封锁时间(默认设置:
0.2秒):
感应模块在每一次感应输出后(高电平变为低电平),可以紧跟着设置一个封锁时间,在此时间段内感应器不接收任何感应信号。
此功能可以实现(感应输出时间和封锁时间)两者的间隔工作,可应用于间隔探测产品;
同时此功能可有效抑制负载切换过程中产生的各种干扰。
✓输出高电平信号:
可方便与各类电路实现对接。
✓感应模块通电后有一分钟左右的初始化时间,在此期间模块会间隔地输出0-3次,一分钟后进入待机状态。
✓可以感应人体或动物发出的红外光线,感应区尽量避免正对着发热电器和物体以及容易被风吹动的杂物和衣物。
应尽量避免灯光等干扰源近距离直射模块表面的透镜,以免引进干扰信号产生误动作;
使用环境尽量避免流动的风,风也会对感应器造成干扰。
✓感应模块采用双元探头,探头的窗口为长方形,双元(A元B元)位于较长方向的两端,当人体从左到右或从右到左走过时,红外光谱到达双元的时间、距离有差值,差值越大,感应越灵敏,当人体从正面走向探头或从上到下或从下到上方向走过时,双元检测不到红外光谱距离的变化,无差值,因此感应不灵敏或不工作;
所以安装感应器时应使探头双元的方向与人体活动最多的方向尽量相平行,保证人体经过时先后被探头双元所感应。
为了增加感应角度范围,本模块采用圆形透镜,也使得探头四面都感应,但左右两侧仍然比上下两个方向感应范围大、灵敏度强,安装时仍须尽量按以上要求。
1.6无线音视频传输模块
1.6.1介绍
无线音视频传输模块包括SKY-TX24200无线影音发射模块和SKY-RX2188无线影音接收模块。
TX24200与RX2188配对使用空旷距离可以达到2公里。
TX24200是工作在2400-2480MHzISM频段内的FM音视频发射模块。
TX24200以及2188是工作在2400-2480MHzISM频段内的FM音视频接收解调模块。
模块采用单芯片设计,该芯片集成了VCO、PLL、宽带FM视频解调、FM伴音解调,使模块体积小功耗低灵敏度高等特点;
采取贴片或是插件封装形式,方便用户的安装要求。
本模块的应用只需简单连接电源,单/双音频线,视频线,接上天线就可接收音乐、图像信号。
1.6.2实物图片
SKY-TX24200无线影音发射模块
SKY-RX2188无线影音接收模块
1.6.3特性参数
模块
特性
SKY-242002.4G200mw无线影音发射模块
✓2.4G宽带FM音视频同步发射
✓小体积:
28×
27×
7mm
✓大功率:
5V200MW
✓内置频率锁相环高稳定性
✓低杂波泄漏
✓直接输出音频、视频信号
✓八频道发射
✓用户方便使用
SKY-RX2188(2.4G)无线影音接收模块
✓2.4G宽带FM接收
36×
24×
4.5mm
✓低功耗:
3.3V110mA
✓高接收灵敏度:
-90dBm
✓低杂波泄漏:
符合CE,FCC要求
✓八频道接收
✓贴片安装,方便用户使用
1.6.4使用方法
(1)SKY-TX24200无线音视频发射模块(实际履带机器人采用CH5频道)
引脚定义及频段控制图
电气参数
电气
参数
单位
调制方式
FM宽频调制
视频格式
NTSC/PAL
最小值
典型值
最大值
输出阻抗
-
50
Ohm
输出功率
22
23
24
dBm
CH1
2414
MHz
CH2
2432
CH3
2450
CH4
2468
CH5
2370
CH6
2390
CH7
2490
CH8
2510
3.6
5.0
5.5
V
工作电流
200
250
mA
-10
+85
oC
视频带宽
8.0
10
 升级会员
升级会员 