基于BP神经网络整定的PID控制资料下载.pdf
《基于BP神经网络整定的PID控制资料下载.pdf》由会员分享,可在线阅读,更多相关《基于BP神经网络整定的PID控制资料下载.pdf(2页珍藏版)》请在冰豆网上搜索。
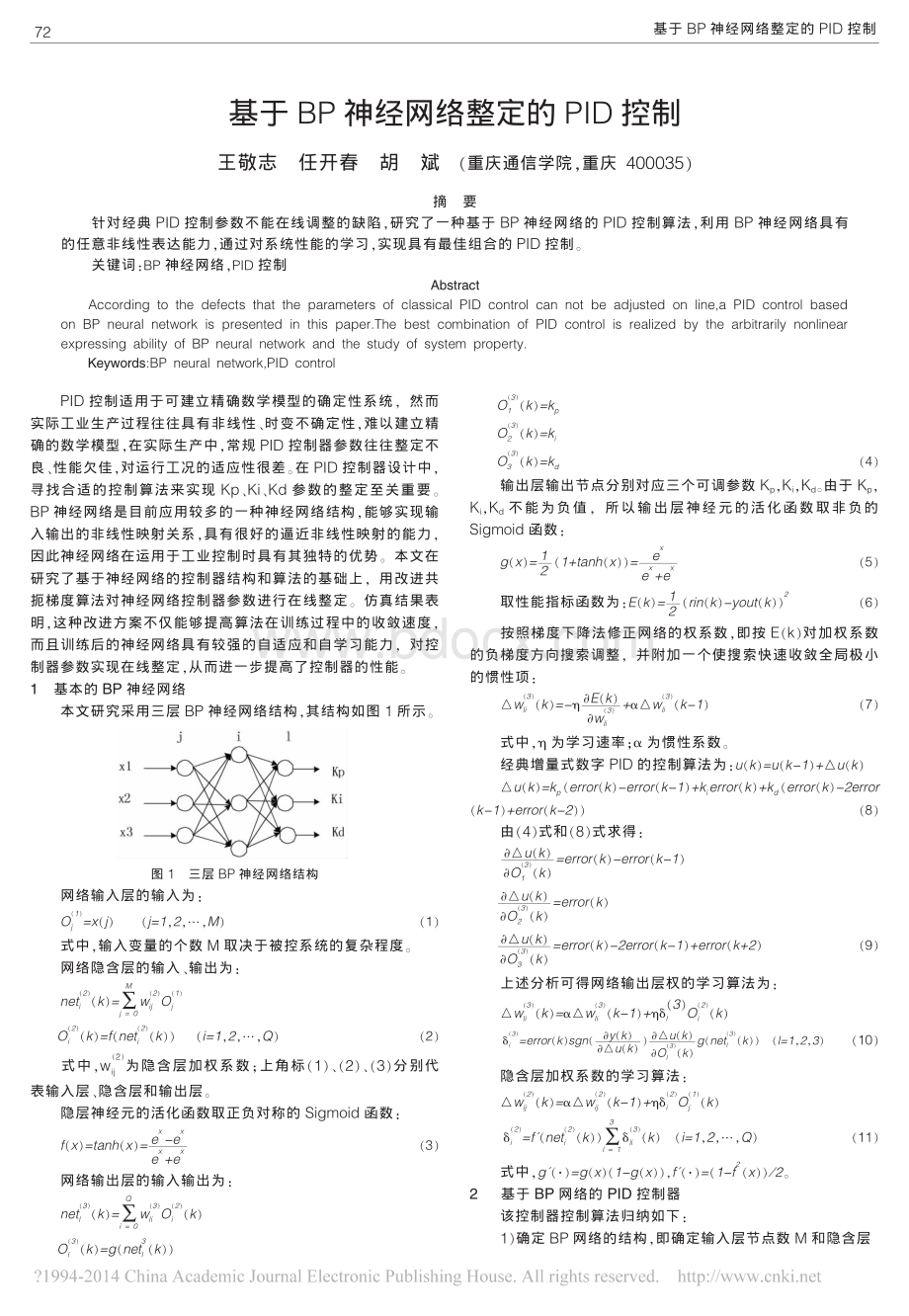
图1三层BP神经网络结构网络输入层的输入为:
O
(1)jx(j)(j1,2,M)
(1)式中,输入变量的个数M取决于被控系统的复杂程度。
网络隐含层的输入、输出为:
net
(2)i(k)Mj0w
(2)ijO
(1)jO
(2)i(k)f(net
(2)i(k)(i1,2,Q)
(2)式中,w
(2)ij为隐含层加权系数;
上角标
(1)、
(2)、(3)分别代表输入层、隐含层和输出层。
隐层神经元的活化函数取正负对称的Sigmoid函数:
f(x)tanh(x)exexexex(3)网络输出层的输入输出为:
net(3)l(k)Qi0w(3)liO
(2)i(k)O(3)l(k)g(net3l(k)O(3)1(k)kpO(3)2(k)kiO(3)3(k)kd(4)输出层输出节点分别对应三个可调参数Kp,Ki,Kd。
由于Kp,Ki,Kd不能为负值,所以输出层神经元的活化函数取非负的Sigmoid函数:
g(x)12(1tanh(x)exexex(5)取性能指标函数为:
E(k)12(rin(k)yout(k)2(6)按照梯度下降法修正网络的权系数,即按E(k)对加权系数的负梯度方向搜索调整,并附加一个使搜索快速收敛全局极小的惯性项:
w(3)li(k)鄣E(k)鄣w(3)liw(3)li(k1)(7)式中,为学习速率;
为惯性系数。
经典增量式数字PID的控制算法为:
u(k)u(k1)u(k)u(k)kp(error(k)error(k1)kierror(k)kd(error(k)2error(k1)error(k2)(8)由(4)式和(8)式求得:
鄣u(k)鄣O(3)1(k)error(k)error(k1)鄣u(k)鄣O(3)2(k)error(k)鄣u(k)鄣O(3)3(k)error(k)2error(k1)error(k2)(9)上述分析可得网络输出层权的学习算法为:
w(3)li(k)w(3)li(k1)(3)lO
(2)i(k)(3)ierror(k)sgn(鄣y(k)鄣u(k)鄣u(k)鄣O(3)l(k)g(net(3)l(k)(l1,2,3)(10)隐含层加权系数的学习算法:
w
(2)ij(k)w
(2)ij(k1)
(2)iO
(1)j(k)
(2)if(net
(2)i(k)3l1(3)li(k)(i1,2,Q)(11)式中,g()g(x)(1g(x),f()(1f2(x)2。
2基于BP网络的PID控制器该控制器控制算法归纳如下:
1)确定BP网络的结构,即确定输入层节点数M和隐含层基于BP神经网络整定的PID控制王敬志任开春胡斌(重庆通信学院,重庆400035)摘要针对经典PID控制参数不能在线调整的缺陷,研究了一种基于BP神经网络的PID控制算法,利用BP神经网络具有的任意非线性表达能力,通过对系统性能的学习,实现具有最佳组合的PID控制。
关键词:
BP神经网络,PID控制AbstractAccordingtothedefectsthattheparametersofclassicalPIDcontrolcannotbeadjustedonline,aPIDcontrolbasedonBPneuralnetworkispresentedinthispaperThebestcombinationofPIDcontrolisrealizedbythearbitrarilynonlinearexpressingabilityofBPneuralnetworkandthestudyofsystempropertyKeywords:
BPneuralnetwork,PIDcontrol基于BP神经网络整定的PID控制72工业控制计算机2011年第24卷第3期(上接第93页)后与单片机的P1口相连,组成测量电路。
4软件系统设计系统利用89S52单片机片内丰富的资源来实现软件系统设计。
程序采用模块化的设计方法,分为系统初始化模块、数据采集模块、数据处理模块等。
主程序流程图如图2。
数据采集完成时,主程序调用数据处理模块计算速度,计算公式为:
n60fm14pfm2km1m2。
5结束语本文提出了一种数字式速度传感器设计方案,该方案结构简单,安装方便,有较高的精度,适于速度数据的测量和采集。
参考文献1何佳宁,刘强高精度圆感应同步角度测量系统J电子测试,2008(10)2王伯雄测试技术基础M北京:
清华大学出版社,20033费伟中,沈建新,周勇增量式光电编码器计数与接口电路的设计J微特电机,2007,35
(1):
1718收稿日期:
2010113节点数Q,并给出各层加权系数的初值w
(1)ij(0)和w
(2)li(0),选定学习速率和惯性系数,此时k1;
2)采样得到rin(k)和yout(k),计算该时刻误差error(k)rin(k)yout(k);
3)计算神经网络NN各层神经元的输入、输出,NN输出层的输出即为PID控制器的三个可调参数Kp,Ki,Kd;
4)根据(8)式计算PID控制器的输出u(k);
5)进行神经网络学习,在线调整加权系数w
(1)ij(k)和w
(2)li(k),实现PID控制参数的自适应调整;
6、置kk1,返回到1。
3仿真实验设被控对象为非线性离散系统,其近似数学模型为:
yout(k)a(k)yout(k1)1yout2(k1)u(k1)式中,系数a(k)是慢时变的,a(k)12(108e01k)。
神经网络的结构选择453,学习速率028和惯性系数004,加权系数初始值取区间05,05上的随机数。
输入信号为rin(k)10。
图3阶跃跟踪曲线比较仿真图像中,
(1)为基于BP神经网络的PID控制,
(2)为经典PID控制。
仿真结果表明,本文算法在不增加算法复杂性的前提下提高了收敛速度,无需建立被控对象精确的数学模型,对控制参数实现在线整定,能够很好地近似非线性对象。
4结束语将改进的BP算法应用于PID控制中,实现PID控制参数的在线调整和优化,具有较强的适应性和鲁棒性,且该算法与改进前的PID控制相比较,效果更加明显。
参考文献1耿小庆,和金生,于宝庆几种改进BP算法及其在应用中的比较分析J计算机工程与应用,2007,43(33):
2432452海金,叶世伟神经网络原理M北京:
机械工业出版社,2004:
122683孙小权,钱少明基于BP神经网络的料筒温度PID控制器J机电工程,2008,25(5):
18204YoshihiroOhnishi,TalikKGravelAnewtypeneuralnetworkPIDcontrolfornonlinearplantscontrolIEEETransonNeuralNetworks,2003;
11(4):
4955065夏玮,李朝辉MATLAB控制系统仿真与实例详解M北京:
人民邮电出版社,2008收稿日期:
20101019图4误差曲线比较图5控制器的输入曲线比较图2基于BP网络的PID控制器结构!
73
 升级会员
升级会员 