带状态观测器的控制系统综合设计与仿真毕业设计.docx
《带状态观测器的控制系统综合设计与仿真毕业设计.docx》由会员分享,可在线阅读,更多相关《带状态观测器的控制系统综合设计与仿真毕业设计.docx(26页珍藏版)》请在冰豆网上搜索。
带状态观测器的控制系统综合设计与仿真毕业设计
课程设计任务书
题目名称(包括主要技术参数)及要求
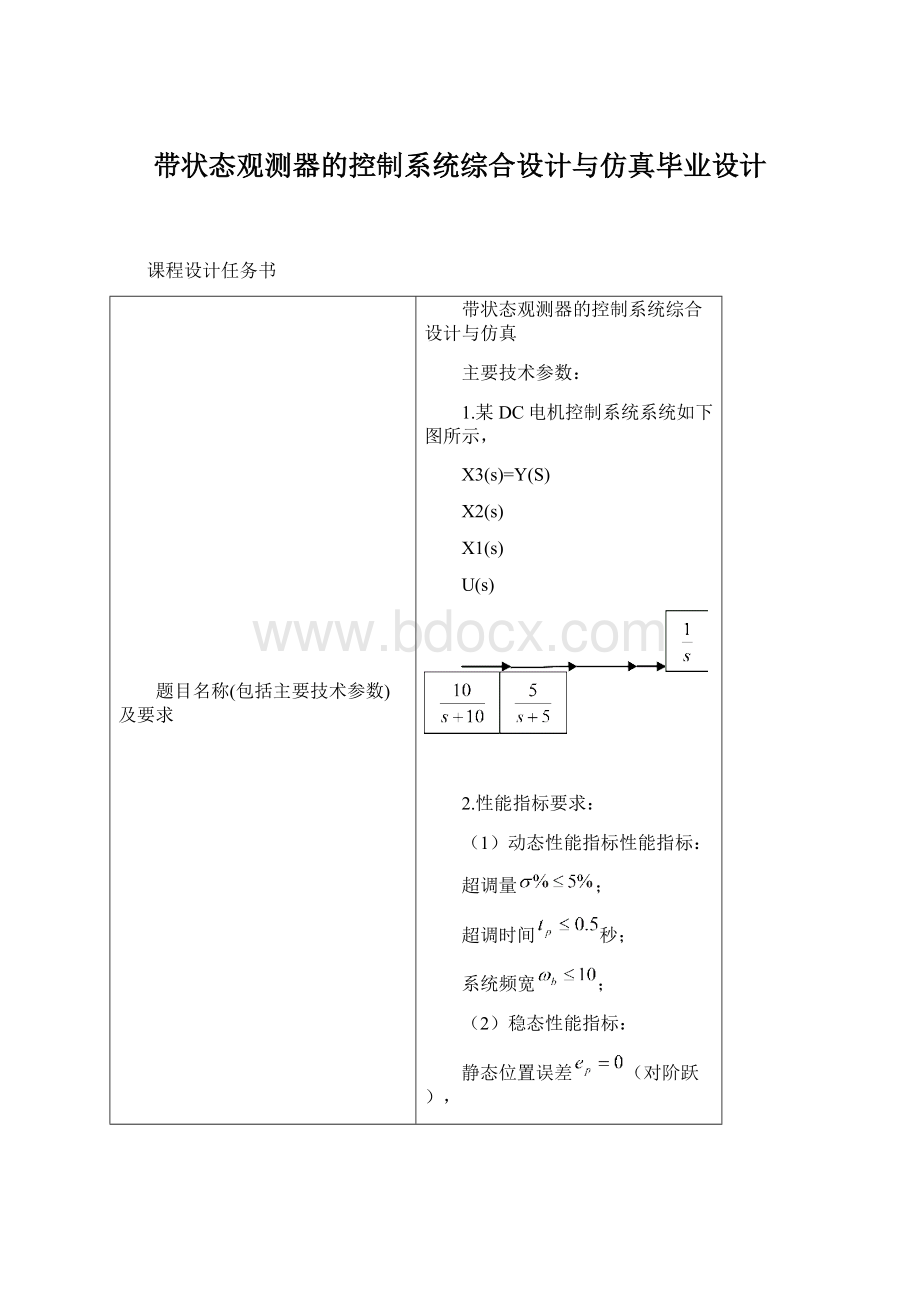
带状态观测器的控制系统综合设计与仿真
主要技术参数:
1.某DC电机控制系统系统如下图所示,
X3(s)=Y(S)
X2(s)
X1(s)
U(s)
2.性能指标要求:
(1)动态性能指标性能指标:
超调量;
超调时间秒;
系统频宽;
(2)稳态性能指标:
静态位置误差(对阶跃),
静态速度误差(对速度);
完成资料:
1、设计说明书一份(约20页);
2、系统仿真结果图。
设计内容及工作量
1.按图中选定的状态变量建立系统的状态空间数学模型
2.对原系统在simulink下进行仿真分析,对所得的性能指标与要求的性能指标进行比较
3.根据要求的性能指标确定系统综合的一组期望极点
4.假定系统状态均不可测,通过设计系统的全维状态观测器进行系统状态重构
5.通过状态反馈法对系统进行极点配置,使系统满足要求的动态性能指标
6.合理增加比例增益,使系统满足要求的稳态性能指标
7.在simulink下对经综合后的系统进行仿真分析,验证是否达到要求的性能指标的要求
主要参考资料
1、《现代控制理论》课本
2、《自动控制原理》课本
3、《Matlab教程》课本
带状态观测器的控制系统综合设计与仿真
一、按选定的状态变量建立系统的的状态空间描述
1、选定的状态变量建立系统的状态空间数学模型
由任务书给定要求可以写出如下关系式
由上方程可得
即
拉式反变换为
输出由图可知为
则传递函数的状态空间描述可写为
2、使用Matlab得到状态空间描述
在Matlab中输入如下语句也得到状态空间描述
k=50;z=[];p=[-5-100];
sys=zpk(z,p,k);
G1=ss(sys)
可以得到状态变量的空间数学模型
G1=
二、对原系统仿真并比较性能指标
原受控系统仿真图如下:
图1原受控系统仿真图
原受控系统的阶跃响应如下图:
图2原受控系统的阶跃响应曲线
很显然,原系统是不稳定的。
三、根据性能指标确定系统一组期望极点
由于原系统为三阶系统,应该有三组期望极点,为了计算的方便引入两个共轭的主导极点S1、S2和一个远极点S3。
由系统要求的性能指标:
超调量,超调时间秒,系统频宽。
可以计算求得着三个期望极点,具体过程如下。
由二阶系统的各项性能指标公式
式中,和为此二阶系统的阻尼比和自振频率。
可以求得:
由,可得,从而有,于是选。
由得
由和已选的得,与的结果比较。
可以确定=9.8。
这样,便定出了主导极点
远极点的实部应为主极点的实部的5倍以上,故选取S3=100
四、通过状态反馈法对系统进行极点配置
1、引入状态负反馈K
已知能空性判别矩阵
则
由上式知,原系统是完全能控的。
受控系统的特征多项式为:
受控系统期望的特征多项式为:
于是矩阵为:
非奇异变换矩阵为:
非奇异变换矩阵为:
于是状态反馈矩阵为:
2、验证状态负反馈系统的稳定性
在原来的开环系统中加入状态反馈可以改变系统的动态性能,状态反馈环节的添加如下图3所示
图3加入状态反馈的系统结构图
根据示波器显示观察的图像图4所示
图4加状态负反馈系统输出波形
显然看出系统的动态指标不能达到要求,因此还应该调整系统的放大倍数K1来达到稳态性能要求。
3、使用Matlab程序求矩阵K
A=[-500;10-100;010];b=[5;0;0];c=[001];
pc=[-6.93+6.93i,-6.93-6.93i,-100];
K=acker(A,b,pc)
运行结果为
K=
19.77208.8690192.0996
五、合理增加比例增益,使系统满足稳态指标
将原有闭环传递函数乘以比例增益K1,对应的闭环传递函数为
所以由要求的跟踪阶跃信号的误差,有
所以
对上面的初步结果,再用对跟踪速度信号的误差要求来验证,即
显然满足的要求,故。
1、放大系数改变后系统动态性校验
状态反馈改变放大倍数后的仿真图如图5所示
图5放大倍数改变后的状态反馈图
示波器的显示图像如图6所示
图6闭环系统的阶跃响应曲线
图6的局部放大图以及超调量、超调时间、峰值大小如图7所示
图7闭环系统阶跃响应曲线局部放大图
由仿真图得:
,,均满足要求。
六、设计全维观测器
当系统的状态完全能控时,可以通过状态的线性反馈实现极点的任意配置,但是当系统变量的物理意义有时很不明确,不是都能用物理方法测量的,给状态反馈的实现造成困难。
为此,人们就提出了所谓的状态观测器或状态重构问题,创造一个新系统,以原系统的输入和输出为输入,输出就是对原系统状态的估计。
1、判断观测器的能观性:
根据给定的受控系统,可以写出能观性判定矩阵
只需判断其是否满秩
即
所以系统完全能观,又因之前以求得系统是完全能控的,所以系统即完全能控、又完全能观测。
因此,系统的极点可以任意配置。
2、计算观测器的反馈矩阵L
该设计中系统的极点为:
取观测器极点,是观测器的收敛速度是被控系统收敛速度的3倍。
如果仅仅对闭环极点乘以3,则阻尼比和最大超量不变,而系统上升时间和稳定时间将缩小到原来的。
因此,选择
假设全维观测器反馈矩阵为:
期望的特征多项式可以写为:
实际的特征多项式求解:
闭环观测器的特征多项式为:
可以列出等式:
解得:
3、得到观测器的状态方程
因此观测器状态方程为:
可以写为另一种形式
4、对所得到的状态方程进行仿真验证
由上面计算得出的带观测器状态反馈的闭环系统方框图如下
图8带观测器状态反馈的闭环系统方框图
5、用Matlab求解矩阵L
同样可以采用Matlab求得所需要的L矩阵:
>>A=[-500;10-100;010];
>>b=[5;0;0];
>>C=[001]
>>r0=rank(obsv(A,C))
>>A1=A';b1=C';C1=b';
>>P=[-360-20.79-20.79];
>>K=acker(A1,b1,P);
>>L=K'
r0=3
L=1.0e+03*
8.8510
9.5523
0.3866
七、在simulink下对经综合后的系统进行仿真分析
在simulink环境下对控制系统进行仿真分析得到图9如下
图9带观测器状态反馈的闭环系统阶跃响应曲线
检验系统的跟随性能如下图加入示波器
各个部分的响应曲线如下图所示
图10各状态阶跃响应曲线
其中实线代表原系统,叉号代表加观测器后的曲线,观测器的各状态的阶跃信号与原状态反馈系统的信号完全相同,可见观测器的跟随性能很好。
八、课程设计心得体会
通过此次课程设计让我有机会将现代控制理论、自动控制原理以及Matlab的相关知识结合起来解决一个具体的问题,让我对这些科目有了更加深入的认识。
现代控制理论是一门工程理论性强的课程,在学习这门课程时,深感概念抽象,不易掌握。
学完之后,从工程实际抽象出一个控制论方面的课题很难,如何用现代控制论的基本原理去解决生产实际问题则更困难。
线性系统理论是建立在线性空间的基础上的,它大量使用矩阵论中深奥的内容,比如线性变换、子空间等,是分析中最常用的核心的内容,要深入理解,才能体会其物理意义,因此有良好的线性代数基础也显得尤为重要。
此次课程设计看似简单,其实不然。
想要得到要求的数据必须合理的估计好每一个细小的数据,在最初在拿到课题的时候心想这么简单的题目,几天就能解决了,谁知真正设计起来后才知道并没有想象中的简单,每次再参数的选择时都会碰到相应的问题,有些数据明明满足计算出来的理论要求,可是最终仿真分析时,不是超调量不合适就是峰值时间不能满足要求,这就需要耐心的调试和更改,虽然这个过程很枯燥麻烦,但最终还是得到了我想要的结果。
对此我还是很满意的。
此次课程设计的难点我认为在系统期望极点的选择上。
因为如果极点都无法满足要求那么后面的所有计算都不可能正确。
如果直接按照三阶系统设计,没个参数的确定过程将会很复杂。
然而如果巧妙的运用了主导极点和远极点的相关知识来先构造一个二阶系统则各个参数计算过程都变得简单了。
在课程设计过程中我同样体会到了Matlab在现代控制理论计算中的强大功能,无论是状态空间描述、K矩阵的确定、L矩阵的确定、系统的仿真、超调量超调时间的计算等几乎所有的问题的可以用Matlab语言实现。
在完成了整个课程设计后,我不由的感叹要学好一门课程并不是仅仅停留在会解题上,而是要学会设计、分析、仿真来解决问题。
如何应用现代控制论的基本原理去解决生产实际问题则更困难。
最后感谢老师和同学在课程设计的过程中给予我的指导和帮助。
9、参考书目
1、《自动控制原理》主编:
李素玲胡建出版社:
西安电子科技大学出版社
2、《现代控制理论》主编:
谢克明李国勇出版社:
清华大学出版社
3、《MODERNCONTROLTHEORY》主编:
胡健刘丽娜出版社:
国防工业出版社
4、《MATLAB7辅助控制系统设计与仿真》主编:
飞思科技产品研发中心出版社:
电子工业出版社
《控制系统设计与仿真》主编:
赵文峰出版社:
西安电子科技大学出版社
毕业设计(论文)原创性声明和使用授权说明
原创性声明
本人郑重承诺:
所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:
日 期:
指导教师签名:
日 期:
使用授权说明
本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:
按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:
日 期:
学位论文原创性声明
本人郑重声明:
所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:
日期:
年月日
学位论文版权使用授权书
本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权 大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:
日期:
年月日
导师签名:
日期:
年月日
指导教师评阅书
指导教师评价:
一、撰写(设计)过程
1、学生在论文(设计)过程中的治学态度
 升级会员
升级会员 