基于adams对汽车前悬架的建模与仿真分析.docx
《基于adams对汽车前悬架的建模与仿真分析.docx》由会员分享,可在线阅读,更多相关《基于adams对汽车前悬架的建模与仿真分析.docx(38页珍藏版)》请在冰豆网上搜索。
基于adams对汽车前悬架的建模与仿真分析
基于ADAMS对汽车前悬架的建模与仿真分析
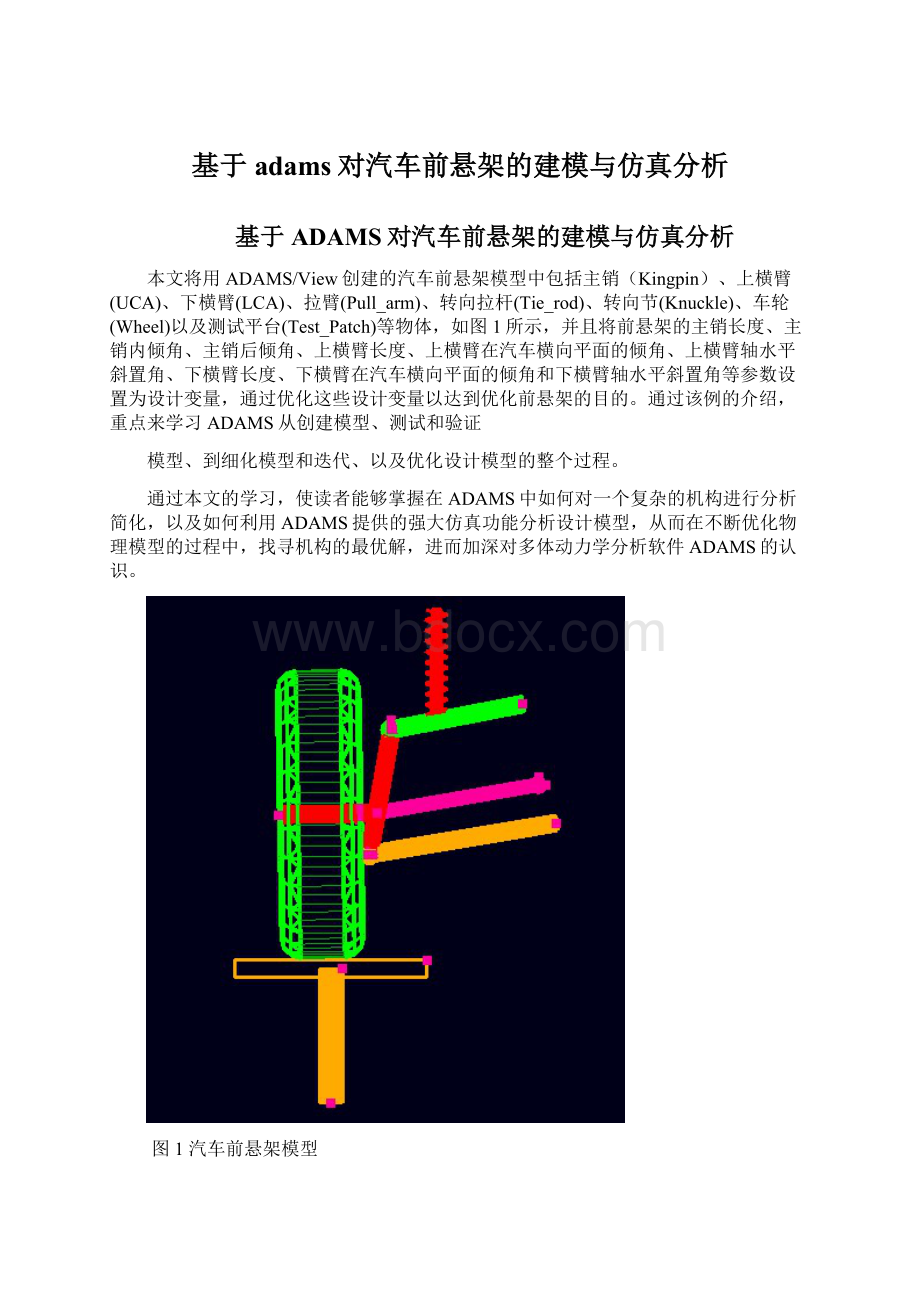
本文将用ADAMS/View创建的汽车前悬架模型中包括主销(Kingpin)、上横臂(UCA)、下横臂(LCA)、拉臂(Pull_arm)、转向拉杆(Tie_rod)、转向节(Knuckle)、车轮(Wheel)以及测试平台(Test_Patch)等物体,如图1所示,并且将前悬架的主销长度、主销内倾角、主销后倾角、上横臂长度、上横臂在汽车横向平面的倾角、上横臂轴水平斜置角、下横臂长度、下横臂在汽车横向平面的倾角和下横臂轴水平斜置角等参数设置为设计变量,通过优化这些设计变量以达到优化前悬架的目的。
通过该例的介绍,重点来学习ADAMS从创建模型、测试和验证
模型、到细化模型和迭代、以及优化设计模型的整个过程。
通过本文的学习,使读者能够掌握在ADAMS中如何对一个复杂的机构进行分析简化,以及如何利用ADAMS提供的强大仿真功能分析设计模型,从而在不断优化物理模型的过程中,找寻机构的最优解,进而加深对多体动力学分析软件ADAMS的认识。
图1汽车前悬架模型
1.1汽车前悬架模型参数
汽车前悬架模型的主销长度为330mm,主销内倾角为10°,主销后倾角为2.5°,上横臂长度350mm,上横臂在汽车横向平面的倾角为11°,上横臂轴水平斜置角为-5°,下横臂长500mm,下横臂在汽车横向平面的倾角为9.5°,下横臂轴水平斜置角为10°,车轮前束角为0.2°。
1.2汽车前悬架模型创建
1.2.1启动并设置工作环境
(1)开启
双击桌面上的ADAMS/View2010的快捷图标,打开ADAMS/View,出现新建图2对话框,在欢迎对话窗口中选择“Createanewmodel”,在模型名称(ModelName)栏中输入:
FRONT_SUSP,此处也可更改文件保存目录,单位制及重力方向等,这里先采用系统默认设置,直接点OK,进入ADAMS2010主界面,如图3所示,图中的浮动条即是ADAMS的主工具箱。
图2创建新文件图图3ADAMS主界面
(2)设置工作环境。
在ADAMS/View的菜单栏中,选择Setting菜单中的Units命令,将模型的长度单位、质量单位、力单位、时间单位、角度单位和频率单位分别设置为毫米、千克、牛顿、秒、度和赫兹。
单位设置如图4所示,然后点OK确定即可。
(3)设置工作网格。
在ADAMS/View的菜单栏中,选择Setting菜单中的WorkingGrid命令,将网格X方向和Y方向的大小分别设置为750和800,将网格的间距设置为50.设置如图5所示,其中Size表示网格的大小,以及Spacing表示网格的间距。
图4设置单位命令图5设置工作网格
1.2.2创建机构杆件
(1)创建设计点
点击ADAMS/View中零件库中的点(Point),选择“AddtoGround”和“Don’tAttach”,如图6所示,它们的名称和位置见表1,可以右键点击创建的点,光标移动到Point选项选择Rename,然后改变创建点名称。
如果创建的设计点位置不够准确,点击PointTable可以用列表编辑器修改它们的坐标位置,如图7所示。
图6创建设计点
表1设计点的位置和名称
设计点
X坐标
Y坐标
Z坐标
LCA_outer
0
0
0
UCA_outer
57.25
324.68
14.39
UCA_inner
399.51
391.21
44.90
LCA_inner
485.65
81.27
-86.82
Tie_rod_outer
-26.95
100
-170.71
Tie_rod_inner
439.55
181.19
-252.50
Knuckle_inner
18.91
107.24
4.75
Knuckle_outer
-235.05
102.81
3.86
图7列表编辑器
(2)创建主销
点击ADAMS/View中零件库中的圆柱体(Cylinder),选择“NewPart”,定义圆柱体的半径(Radius)为20,选择设计点“LCA_outer”和“UCA_outer”,创建主销,如图8所示,并将其重新命名为Kingpin。
图8创建主销
(3)创建上横臂
点击ADAMS/View中零件库中的圆柱体(Cylinder),选择“NewPart”,定义圆柱体的半径(Radius)为20,选择设计点“UCA_outer”和“UCA_inner”,创建上横臂,将其重新命名为UCA。
点击ADAMS/View中零件库中的球体(Sphere),选择“AddtoPart”,定义球体的半径(Radius)为25,选择上横臂为参考物体,球体的位置为设计点“UCA_outer”,如图9所示。
(4)创建下横臂
点击ADAMS/View中零件库中的圆柱体(Cylinder),选择“NewPart”,定义圆柱体的半径(Radius)为20,选择设计点“LCA_outer”和“LCA_inner”,创建下横臂,将其重新命名为LCA。
点击ADAMS/View中零件库中的球体(Sphere),选择“AddtoPart”,定义球体的半径(Radius)为25,选择下横臂为参考物体,球体的位置为设计点“LCA_outer”。
如图10所示。
图9创建上横臂
图10创建下横臂
(5)创建拉臂
点击ADAMS/View中零件库中的圆柱体(Cylinder),选择“NewPart”,定义圆柱体的半径(Radius)为15,选择设计点“Knuckle_inner”和“Tie_rod_outer”,创建拉臂,将其重新命名为Pull_arm。
(6)创建转向拉杆
点击ADAMS/View中零件库中的圆柱体(Cylinder),选择“NewPart”,定义圆柱体的半径(Radius)为15,选择设计点“Tie_rod_inner”和“Tie_rod_outer”,创建转向拉杆,将其重新命名为Tie_rod。
点击ADAMS/View中零件库中的球体(Sphere),选择“AddtoPart”,定义球体的半径(Radius)为20,选择转向拉杆为参考物体,球体的位置为设计点分别为“Tie_rod_outer”和”Tie_rod_inner”。
(7)创建转向节
点击ADAMS/View中零件库中的圆柱体(Cylinder),选择“NewPart”,定义圆柱体的半径(Radius)为20,选择设计点“Knuckle_inner”和“Knuckle_outer”,创建转向节,将其重新命名为Knuckle。
这时创建的前悬架模型如图11所示。
图11创建中的前悬架模型
(8)创建车轮
点击ADAMS/View中零件库中的圆柱体(Cylinder),选择“NewPart”,定义圆柱体的半径(Radius)为375,定义圆柱体的长度(Length)为215。
选择设计点“Knuckle_outer”和“Knuckle_inner”(不能把先后顺序颠倒),创建车轮,将其重新命名为Wheel,如图12所示。
点击ADAMS/View中零件库中的倒圆(Fillet),定义倒圆半径(Radius)为50,选择车轮圆柱体的两条圆边,然后单击鼠标右键,完成倒圆,如图13所示。
图12创建车轮
图13车轮倒圆
(9)创建测试平台
点击ADAMS/View中零件库中的点(Point),选择“AddtoGround”和“Don’tAttach”,创建设计点“POINT_9”,它的位置为(-350,-320,-200)。
单击主工具箱零件库中的,然后在主工具箱的下面出现拉伸体相应的操控栏,如图14所示设置相应的值。
选择设计点“POINT_9”,创建长方体。
点击ADAMS/View中零件库中的圆柱体(Cylinder),选择“AddtoPart”,定义圆柱体的半径(Radius)为30,定义圆柱体的长度(Length)为350,如图15所示,选择长方体为参照物,选择长方体的质心为圆柱体的起始点,垂直向下创建圆柱体,它与长方体组合成测试平台如图16所示,将其重新命名为Test_Patch。
图14设置长方体选项图15设置圆柱体选项
(10)创建弹簧
点击ADAMS/View中零件库中的点(Point),选择“AddtoPart”和“Don’tAttach”,在上横臂(UCA)上,它创建设计点“Spring_lower”的位置为(174.6,347.89,24.85)。
点击ADAMS/View中零件库中的点(Point),选择“AddtoGround”和“Don’tAttach”,创建设计点“Spring_upper”的位置为(174.6,637.89,24.85)。
点击ADAMS/View中力库的弹簧(Spring),设置弹簧的刚度(K)和阻尼(C)分别为129.8和6000,如图17所示,选择设计点Spring_lower和Spring_upper创建弹簧。
图16创建测试平台模型图17创建弹簧模型
1.2.3创建约束
(1)创建球副
点击ADAMS/View中约束库的球副(SphericalJoint),设置球副的选项如图18所示,选择上臂杆(UCA)和主销(Kingpin)为参考物,选择设计点UCA_outer为球副的位置点,创建上横臂和主销之间的约束副。
点击ADAMS/View中约束库的球副(SphericalJoint),设置球副的选项如图18所示,选择下臂杆(LCA)和主销(Kingpin)为参考物,选择设计点LCA_outer为球副的位置点,创建下横臂和主销之间的约束副。
点击ADAMS/View中约束库的球副(SphericalJoint),设置球副的选项如图18所示,选择转向拉杆(Tie_rod)和拉臂(Pull_arm)为参考物,选择设计点Tie_rod_outer为球副的位置点,创建转向拉杆和拉臂之间的约束副。
点击ADAMS/View中约束库的球副(SphericalJoint),设置球副的选项如图19所示,选择设计点Tie_rod_inner为球副的位置点,创建转向拉杆和大地之间的约束副。
(2)创建固定副
点击ADAMS/View中约束库的固定副(FixedJoint),设置固定副选项为“2Bod-1Loc”和“NoemalToGrid”,如图20所示。
选择拉臂(Pull_arm)和主销(Kingpin)为参考物,选择设计点Knuckle_inner为固定副的位置点,创建拉臂和主销之间的约束副。
点击ADAMS/View中约束库的固定副(FixedJoint),设置固定副选项为“2Bod-1Loc”和“NoemalToGrid”,选择转向节(Knuckle)和主销(Kingpin)为参考物,选择设计点Knuckle_inner为固定副的位置点,创建转向节和主销之间的约束副。
点击ADAMS/View中约束库的固定副(FixedJoint),设置固定副选项为“2Bod-1Loc”和“NoemalToGrid”,选择车轮(Wheel)和转向节(Knuckle)为参考物,选择设计点Knuckle_inner为固定副的位置点,创建拉臂和主销之间的约束副。
图18设置球副选项图19设置球副选项图20设置固定副选项
(3)创建旋转副
首先设置视图为前视图,这个视图方向为基准调整旋转副方向。
点击ADAMS/View中约束库的旋转副(RevoluteJoint),设置旋转副的选项为“1Location”和“NormaltoGrid”如图21所示。
选择设计点“UCA_inner”为旋转副的位置点,放置旋转副后直接在菜单栏中的Edit菜单中选择Modify命令,修改刚创建的旋转副。
系统弹出修改旋转副对话窗口(图22),点击改变位置(ChanggePosition)按钮,系统弹出移动目标对话窗,如图23所示。
在角度栏(Rotate)中在Y方向上输入一个-5,将旋转副的方向旋转5°,满足上横臂轴水平斜置-5°的要求。
接着在前视图的条件下,点击ADAMS/View中约束库的旋转副(RevoluteJoint),设置旋转副的选项为“1Location”和“NormaltoGrid”,选择设计点“LCA_inner”为旋转副的位置点,放置旋转副后直接在菜单栏中的Edit菜单中选择Modify命令,修改刚创建的旋转副。
系统弹出修改旋转副对话窗口,点击改变位置(ChanggePosition)按钮,系统弹出移动目标对话窗。
在角度栏(Rotate)中在Y方向上输入一个+10,将旋转副的方向旋转10°,满足下横臂轴水平斜置10°的要求。
图21设置固定副选项图22修改旋转副对话框
图23移动目标对话窗口
(4)创建移动副
单击主工具栏中约束库的图标,设置如图24所示,选择测试平台(Test_Patch)的质心为移动副的位置点,垂直向上创建测试平台和大地之间的约束副。
(5)创建点-面约束副
点击ADAMS/View中约束库的点-面约束副(In-planeJointPrimitive),设置如图25所示,选择车轮(Wheel)和测试平台(Test_Patch)为约束的位置点(选择物体的先后顺序不要颠倒),垂直向上的方向为约束副方向,创建车轮和测试平台之间的约束副。
图24设置移动副选项图25设置点—面约束副选项
这时创建的前悬架模型如图26所示。
图26完整的前悬架模型
1.2.4检验模型
在窗口右下方的上右点鼠标出现,然后单击,出现图27所示对话框。
图27验证模型
1.3测试模型
1.3.1添加驱动
点击ADAMS/View中的驱动库的直线驱动(TranslationalJointMotion)按钮,选择测试平台和大地的移动副约束,创建直线驱动(TRANS_MOTION_1)。
创建直线驱动后,直接在Edit菜单中选择Modify,可以修改直线驱动,在添加驱动对话框中的“Functiom(time)=”栏中,输入驱动的函数表达式:
100*sin(360d*time),如图28所示,它表示车轮的上跳和下跳行程均为100mm。
在ADAMS/View主工具箱中,选择仿真按钮,设置解算参数终止时间为1,工作步长为100.如图29所示,进行仿真。
观察前悬架模型的运动仿真情况。
图28添加驱动对话窗图29仿真设置
1.3.2测量主销内倾角
在主菜单栏中选择Build—Mesure—Function—New,创建测量函数。
在函数编辑器对话窗口里其测量名称(MeasureName)、单位(Unit)和主销内倾角的函数表达式如图30所示。
具体编辑过程如下:
首先:
输入反正切函数“ATAN()”;
然后:
将光标移动到括号内,在函数编辑器的函数选项中选择“Displacement”中的“DisplacementX”,测量两点间X方向的距离,按Assist键,系统弹出助理对话框,在“ToMarker”栏中输入主销设计点“UCA_outer”处的Marker:
.FRONT_SUSP.Kingpin.MARKER17,在“FromMarker”栏中输入主销设计点“LCA_outer”处的Marker:
Kingpin.MARKER1。
如图31所示,系统自动生成两个点在X方向距离表达式。
同样:
测量两点在Y轴方向上的距离时选择“DisplacementY”,其余与X方向都一致即可。
最后:
一切完成后点“OK”,系统生成主销内倾角变化的测量曲线,如图32所示。
图30函数编辑器
图31测量两点在X方向的距离
图32主销内倾角变化曲线
1.3.3测量主销后倾角
其编辑操作同上如图33所示,其中在“ToMarker”栏中输入主销设计点“UCA_outer”处的Marker:
.FRONT_SUSP.Kingpin.MARKER17,在“FromMarker”栏中输入主销设计点“LCA_outer”处的Marker:
Kingpin.MARKER1。
然后系统生成主销后倾角变化测量曲线,其如图34所示。
图33函数编辑器
图34主销后倾角变化曲线
1.3.4测量前轮外倾角
其编辑操作同上如图35所示,其中在“ToMarker”栏中输入转向节在设计点“Knuckle_outer”处的Marker:
.FRONT_SUSP.Knuckle.MARKER10,在“FromMarker”栏中输入转向节在设计点“Knuckle_inner”处的Marker:
Knuckle.MARKER29。
然后系统生成前轮外倾角变化测量曲线,其如图36所示。
图35函数编辑器
图36前轮外倾角变化曲线
图37函数编辑器
1.3.5测量前轮前束角
编辑同上如图37所示,其中在“ToMarker”栏中输入转向节在设计点“Knuckle_outer”
的Marker:
.FRONT_SUSP.Knuckle.MARKER10,在“FromMarker”栏中输入转向节在设计点“Knuckle_inner”处的Marker:
Knuckle.MARKER29。
然后系统生成前轮前束角变化测量曲线,其如图38所示
图38前轮前束角变化曲线
1.3.6测量车轮接地点侧向滑移量
首先在车轮(Wheel)上创建Marker为Wheel.MAR_5,修改其位置为(-150,-270,0);然后在大地上创建Marker为ground.MAR_6,其位置与Wheel.MAR_5相同。
其编辑操作同上如图39所示,其中在“ToMarker”选择Wheel.MAR_5,“FromMarker”选择ground.MAR_6。
然后系统生成车轮接地点侧向滑移测量曲线,其如图40所示。
图39函数编辑器
图40车轮接地点侧向滑移测量曲线
1.3.7测量车轮跳动量
其编辑操作同上如图41所示,其中在“ToMarker”选择Wheel.MAR_5,“FromMarker”选择ground.MAR_6。
然后系统生成车轮跳动量测量曲线,其如图42所示。
图41函数编辑器
图42车轮跳动测量曲线
1.4前悬架特征曲线
在主菜单栏中选择“Review”菜单中的“Postprocessing”命令,系统进入定制曲线窗口。
选择曲线的数据来源为测量值(Measure)。
在IndependentAxis栏中点击Data,选择主销内倾角(Kingpin_Inclination)的测量曲线为定制曲线的X轴,如图43所示,点击“OK”.
选择车轮跳动量(Wheel_Travel)为测量曲线的Y轴,如图44所示,点击AddCurves创建主销内倾角相对车轮跳动量的变化曲线,如图45所示。
图43选择定制曲线的X轴
图44选择定制曲线的Y轴
图45主销内倾角随车轮跳动的变化曲线
在IndependentAxis栏中点击Data,选择主销后倾角(Caster_Angle)的测量曲线为定制曲线的X轴,选择车轮跳动量(Wheel_Travel)为测量曲线的Y轴,选择AddCurves选项中的“OneCurvePerPlot”点击AddCurves创建主销后倾角相对车轮跳动量的变化曲线,如图46所示。
图46主销后倾角随车轮跳动的变化曲线
在IndependentAxis栏中点击Data,选择前轮外束角(Camber_Angle)的测量曲线为定制曲线的X轴,选择车轮跳动量(Wheel_Travel)为测量曲线的Y轴,选择AddCurves选项中的“OneCurvePerPlot”点击AddCurves创建前轮外倾角相对车轮跳动量的变化曲线,如图47所示。
图47前轮外倾角随车轮跳动的变化曲线
在IndependentAxis栏中点击Data,选择前轮前束角(Toe_Angle)的测量曲线为定制曲线的X轴,选择车轮跳动量(Wheel_Travel)为测量曲线的Y轴,选择AddCurves选项中的“OneCurvePerPlot”点击AddCurves创建前轮前束角相对车轮跳动量的变化曲线,如图48所示.
图48前轮前束角随车轮跳动的变化曲线
在IndependentAxis栏中点击Data,选择前轮接地点侧向滑移量(Sideways_Displacement)的测量曲线为定制曲线的X轴,选择车轮跳动量(Wheel_Travel)为测量曲线的Y轴,选择AddCurves选项中的“OneCurvePerPlot”点击AddCurves创建前轮接地点侧向滑移量相对车轮跳动量的变化曲线,如图49所示。
图49前轮接地点侧向滑移量随车轮跳动的变化曲线
1.5保存模型
点击按钮,返回到模块型界面,然后保存前悬架模型。
参考:
毕业论文(设计)工作记录及成绩评定册
题目:
学生姓名:
学号:
专业:
班级:
指导教师:
职称:
助理指导教师:
职称:
年月日
实验中心制
使用说明
一、此册中各项内容为对学生毕业论文(设计)的工作和成绩评定记录,请各环节记录人用黑色或蓝色钢笔(签字笔)认真填写(建议填写前先写出相应草稿,以避免填错),并妥善保存。
二、此册于学院组织对各专业题目审查完成后,各教研室汇编选题指南,经学生自由选题后,由实验中心组织发给学生。
三、学生如实填好本册封面上的各项内容和选题审批表的相应内容,经指导教师和学院领导小组批准后,交指导教师;指导老师填好《毕业论文(设计)任务书》的各项内容,经教研室审核后交学生签名确认其毕业论文(设计)工作任务。
四、学生在指导老师的指导下填好《毕业论文(设计)开题报告》各项内容,由指导教师和教研室审核通过后,确定其开题,并将此册交指导老师保存。
五、指导老师原则上每周至少保证一次对学生的指导,如实按时填好《毕业论文(设计)指导教师工作记录》,并请学生签字确认。
六、中期检查时,指导老师将此册交学生填写前期工作小结,指导教师对其任务完成情况进行评价,学院中期检查领导小组对师生中期工作进行核查,并对未完成者提出整改意见,后将此册交指导老师保存。
七、毕业论文(设计)定稿后,根据学院工作安排,学生把论文(打印件)交指导老师评阅。
指导老师应认真按《毕业论文(设计)指导教师成绩评审表》对学生的论文进行评审并写出评语,然后把论文和此册一同交教研室。
八、教研室将学生的论文和此册分别交两位评阅人评阅后交回教研室保存。
九、学院答辩委员会审核学生答辩资格,确定答辩学生名单,把具有答辩资格学生的论文连同此册交各答辩小组。
十、学生答辩后由答辩小组记录人填好《毕业论文(设计)答辩记录表》中各项内容,然后把学生的论文和此册一同交所在答辩小组,答辩小组对其答辩进行评审并填写评语后交教研室。
十一、学院答辩委员会进行成绩总评定,填好《毕业论文(设计)成绩评定表》中各项内容,然后把论文(印刷版和电子版(另传))和此册等资料装入专用档案袋中,教教研室后由实验中心统一保存。
1.毕业论文(设计)选题审批表
2.毕业论文(设计)任务书
3.毕业论文(设计)
 升级会员
升级会员 