锁相环Simulink仿真模型.docx
《锁相环Simulink仿真模型.docx》由会员分享,可在线阅读,更多相关《锁相环Simulink仿真模型.docx(3页珍藏版)》请在冰豆网上搜索。
锁相环Simulink仿真模型
锁相环学习总结
通过这段的学习,我对锁相环的一些基本概念、结构构成、工作原理、主要参数以及simulink搭建仿真模型有了较清晰的把握与理解,同时,在仿真中也出现了一些实际问题,下面我将对这段学习中对锁相环的认识和理解、设计思路以及中间所遇到的问题作一下总结:
1.概述
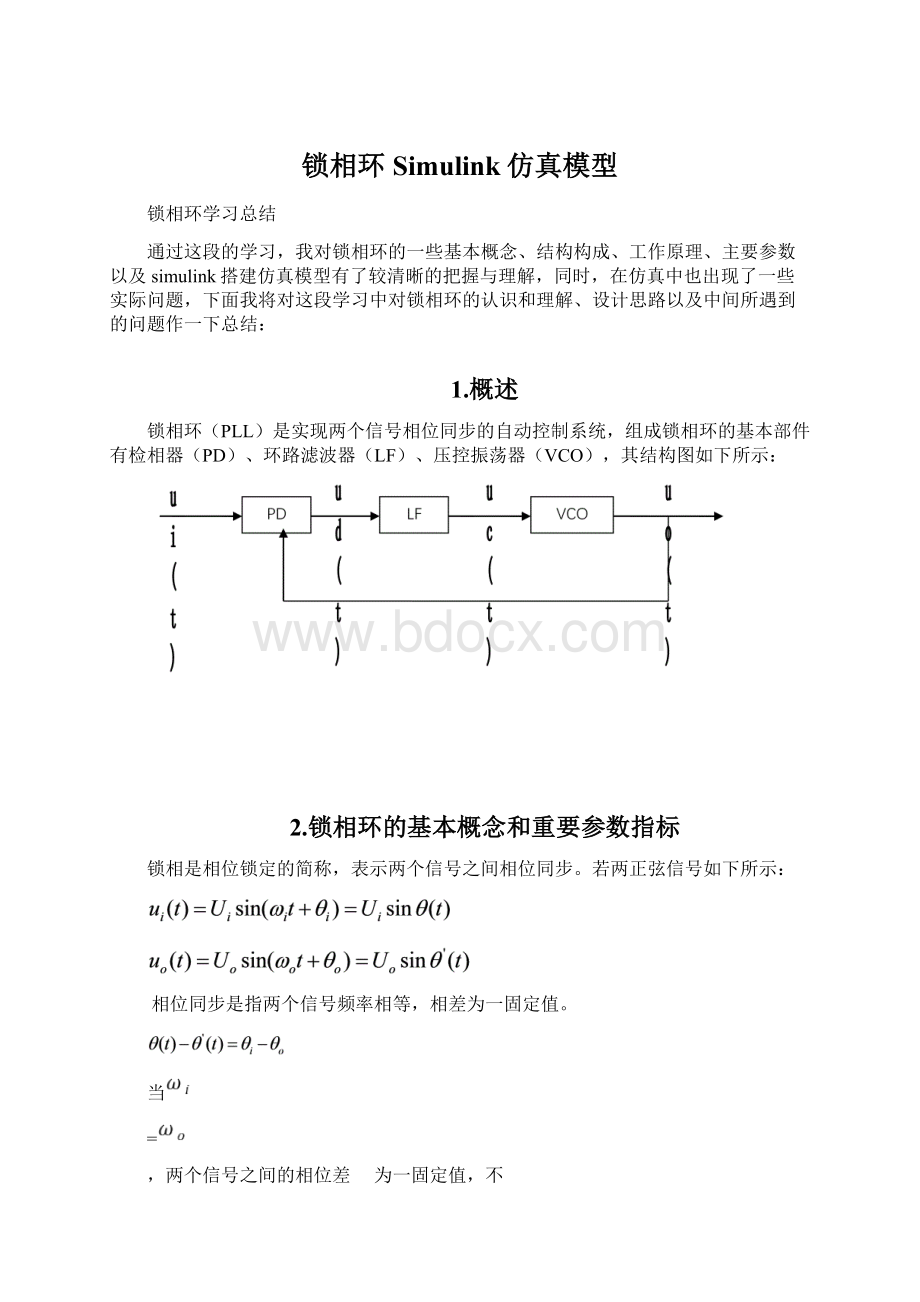
锁相环(PLL)是实现两个信号相位同步的自动控制系统,组成锁相环的基本部件有检相器(PD)、环路滤波器(LF)、压控振荡器(VCO),其结构图如下所示:
2.锁相环的基本概念和重要参数指标
锁相是相位锁定的简称,表示两个信号之间相位同步。
若两正弦信号如下所示:
相位同步是指两个信号频率相等,相差为一固定值。
当
=
,两个信号之间的相位差为一固定值,不
随时间变化而变化,称两信号相位同步。
当
≠
,两个信号的相位差,不论
是否等于
,只要时间有变化,那么相位差就会随时间变化而变化,称此时两信号不同步。
若这两个信号分别为锁相环的输入和输出,则此时环路出于失锁状态。
当环路工作时,且输入与输出信号频差在捕获带范围之内,通过环路的反馈控制,输出信号的瞬时角频率
便由
向
方向变化,总会有一个时刻使得
=
,相位差等于0或一个非常小的常数,那么此时称为相位锁定,环路处于锁定状态。
若达到锁定状态后,输入信号频率变化,通过环路控制,输出信号也继续变化
并向输入信号频率靠近,相位差保持在一个固定的常数之内,则称环路此时为跟踪状态。
锁定状态可以认为是静态的相位同步,而跟踪状态则为动态的相位同步。
环路从失锁进入到锁定状态称为捕获状态。
其他几个环路工作时的重要概念:
快捕带:
能使环路快捕入锁的最大频差称为环路的快捕带,记为
,两倍的快捕带为快捕范围。
捕获带:
能使环路进入锁定的最大固有频差,用
表示,两倍的捕获带为捕获范围。
同步带:
环路在所定条件下,可缓慢增加固有频差,直到环路失锁,把能够维持环路锁定的最大固有频差成为同步带,用
,2
为同步范围。
 升级会员
升级会员 