导线网条件平差计算.docx
《导线网条件平差计算.docx》由会员分享,可在线阅读,更多相关《导线网条件平差计算.docx(10页珍藏版)》请在冰豆网上搜索。
导线网条件平差计算
§3-3导线网条件平差计算
2学时
导线网,包括单一附合导线、单一闭合导线和结点导线网,是目前较为常用的控制测量布设方式之一,英观测值有长度观测值和角度观测值。
在本肖中我们主要讨论单一导线的平差计算,先讨论单一附合导线问题。
1.单一附合导线条件平差
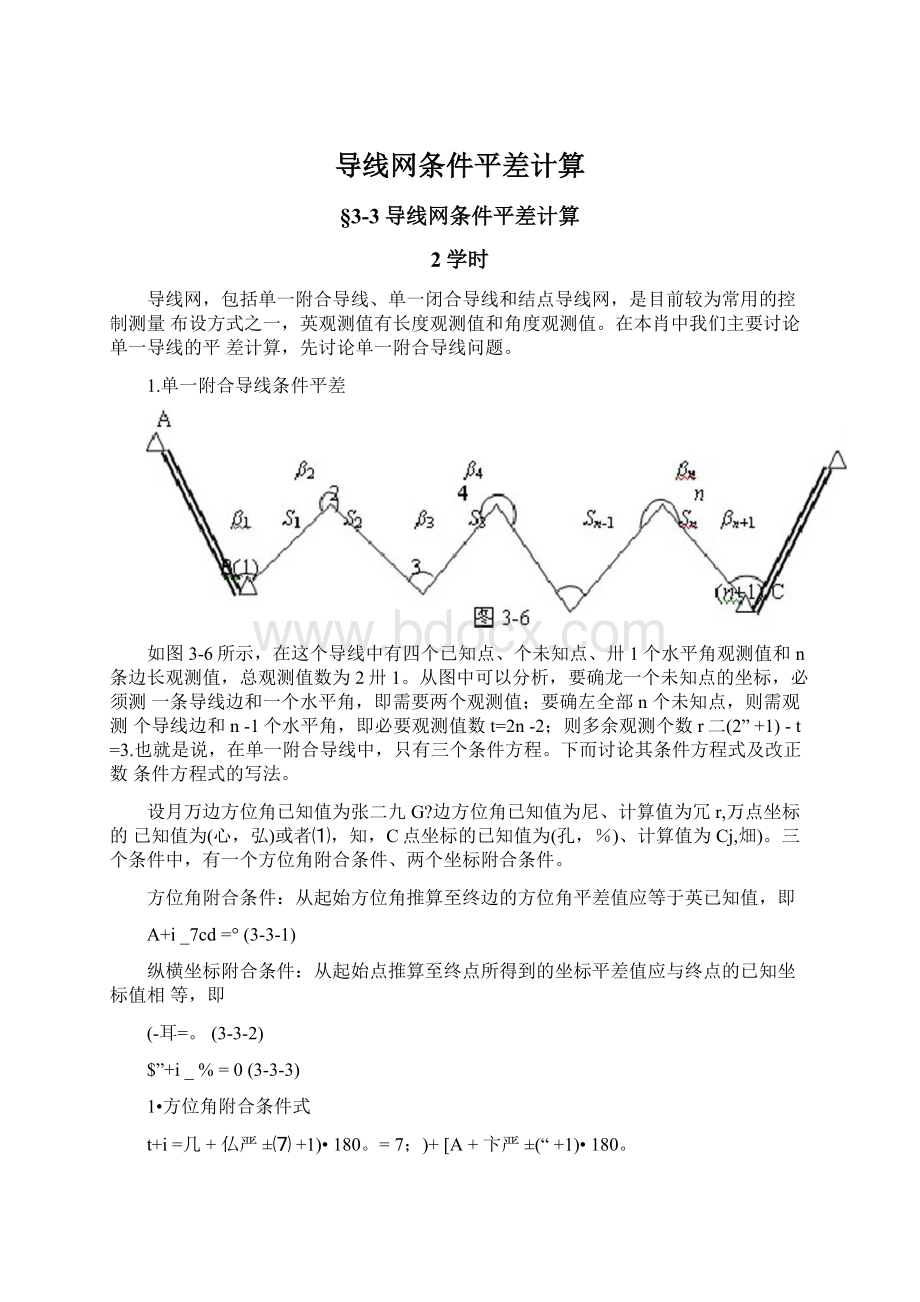
如图3-6所示,在这个导线中有四个已知点、个未知点、卅1个水平角观测值和n条边长观测值,总观测值数为2卅1。
从图中可以分析,要确龙一个未知点的坐标,必须测一条导线边和一个水平角,即需要两个观测值;要确左全部n个未知点,则需观测个导线边和n-1个水平角,即必要观测值数t=2n-2;则多余观测个数r二(2”+1)-t=3.也就是说,在单一附合导线中,只有三个条件方程。
下而讨论其条件方程式及改正数条件方程式的写法。
设月万边方位角已知值为张二九G?
边方位角已知值为尼、计算值为冗r,万点坐标的已知值为(心,弘)或者⑴,知,C点坐标的已知值为(孔,%)、计算值为Cj,畑)。
三个条件中,有一个方位角附合条件、两个坐标附合条件。
方位角附合条件:
从起始方位角推算至终边的方位角平差值应等于英已知值,即
A+i_7cd=°(3-3-1)
纵横坐标附合条件:
从起始点推算至终点所得到的坐标平差值应与终点的已知坐标值相等,即
(-耳=。
(3-3-2)
$”+i_%=0(3-3-3)
1•方位角附合条件式
t+i=几+仏严±⑺+1)•180。
=7;)+[A+卞严±(“+1)•180。
则(3-3-1)式可写为
九厂B=斥+[0+彷]汽±⑺+1)•180°_八。
=0
整理得
[订f=0
其中
吟=一⑺+[Air*±(«+D-180°-rCD)
2.纵坐标附合条件式
终点C坐标平差值表示为
元+】=肴+〔m:
而第,边的坐标增量为
H=S,cosft
式中
&=si+vs,
£=%+两±八180。
=亦[0+7];±八180。
=[乜];+[0訂;+几±八180°
其中久是第,边的近似坐标方位角
刀=[0』+7;±八180°
则(3-3-6)式可表示为
Ax;=(S;+vs.)cos(^J;+T,)
上式按泰勒级数展开,取至一次项,得
AAy
乂=u+cos7;・乜一才[匕H
(3-3-4)
(3-3-5)
(3-3-6)
(3-3-7)
(3-3-8)
其中=Sjcos7;.,为由观测值计算岀的近似坐标增量。
(3-3-8)式代入(3-3-5)式,并按”,合并同类项得
/\yj
fc=耳+Ax,+COS7;-Vs厂];=S+[cos7;•v5,];*-—[(yn-”)%]:
上式代入(3-3-2)式,整理得
[cosT;•];*-+[(儿-X+xn+1-xc=0
上式即为纵坐标条件方程式,也可写为统一形式:
[cos7;--临];一丄[(儿+1-必必]:
一叫=0
P(3-3-9)
叫=一(心+1一无C)(3-3-10)
3.横坐标附合条件式
可以仿照纵坐标条件推导过程(请同学们自己具体推导一下),写出横坐标条件式
(3-3-11)
(3-3-12)
[sinT「vStf;+土[(叫+|_兀心]:
-叫.=0叭=一(儿+i-yc)
为使计算方便,保证精度,在实际运算中,S、扒y常以米为单位,
为单位,则(3-3-9)和(3-3-11)写为
综上所述,单一附合导线的平差计算的基本程序是:
(1)计算各边近似方位角7;和各点的近似坐标增量值5、5
(2)参照(3-3-4)写出方位角条件式,参照(3-3-9)、(3-3-10).(3-3-11).(3-3-12)
或者(3-3-13).(3-3-14)写出纵横坐标条件方程式:
(3)按照条件平差计算的一般程序,汁算最或是值并进行精度评泄。
2.单一闭合导线条件平差
单一闭合导线是单一附合导线的特殊情况,只要将图3-6中的万和GA和。
分别重合,
就可得到图3-7所示的闭合导线。
图中有一个已知点和丁1个待左点,观测了刀个转折角和Ml条导线边。
为了泄向,还观测了一个连接角仇。
不难分析,闭合导线中也只有三个多余观测值,产生三个条件式。
由于没有多余起算数据,因此没有附合条件,只有闭合条件,这一点是与单一附合导线不同的。
1.多边形内角和闭合条件
由于导线网构成了多边形,个转折角的平差值应满足多边形内角和条件
(3-3-15)
仏]笄一(〃一2)・180°=0
写成转折角改正数条件方程形式
(3-3-16)
[少]畀-咋=0
其中
(3-3-17)
^=4A12+,-(«-2)180°
2.坐标增量闭合条件
从万点开始,依次汁算每一条边的纵横坐标增量的平差值,其总和应分别满足如下关系:
(3-3-18)(3-3-19)
参照单一附合导线纵横坐标附合条件推导方法,可以得岀坐标闭合条件的改正数条件方
程式:
(3-3-22)
叭=一仏]一元B)
叫=一(儿+i_%)(3-3-23)
如果S、X、y以米为单位,趴冷、〃以厘米为单位,则(3-3-20)和(3-3-21)两式
可写为:
3.边角权的确定及单位权中误差
导线网中,既有角度又有边长,两者的量纲不同,观测精度一般情况下也不相等。
在依据最小二乘法进行平差时,应合理地确左边角权之间的关系。
为统一确左角度和边长观测值的权,可以采用以下方法。
常数则角度及边长观测值的权为
Ps
一般情况下,可以认为同一导线网中测角精度相等,但是由于导线边长变化较大使得测
边精度不等。
可以取=则有
八_1Ps=—
卩0,6(3-3-26)
式中6>以秒为单位,R无量纲。
在实际计算边长的权时,为使边长观测值的权与角度观测值的权相差不至于过大,应合理选取测边中误差的单位,如果b,的单位取为厘米,则A的量纲为秒'/厘米:
:
而在平差计算中,的单位与改正数刃的单位要一致,均以厘米为单位。
按此方法确左的权,在平差之后还应进行统汁假设检验。
检验通过后才能说明英合理性,
否则,应作修正再进行平差和统讣假设检验。
由于导线网中,既有角度又有边长,单位权中误差应按下式计算:
&=+.'[pw]=+I[”护3勺]+[〃严护戸]
°"Vr1r(3-3-27)
如前所述,由于在计算边角权时,通常取测角中误差作为单位权中误差(即通=血),
所以在按(3-3-27)式算出的单位权中误差的同时,实际上也就计算岀了测角中误差。
测边
中误差可按下式计算:
(3-3-28)
4.例题
A
如图3-8所示,为一四等附合导线•测角中误差°>二±2.5",测边所用测距仪的标
称精度公式二5mm+5ppm•Dw
已知数据和观测值见表3-2。
试按条件平差法对此导线进
行平差,并评肚2号点的点位精度。
表3-2
已知坐标(m)
已知方位角
B(187396.252,29505530.009)
T心=161°44,07.2"
C(184817.605,29509341.482)
Ta,=249°30r27.9"
导线边长观测值(m)
转折角度观测值
$二1474.444
肛二85°30‘21.1"
&=1424.717
仇二254°32r32.2"
S3=1749.322
久二131°04r33.3"
1950.412
仇二272°20z20.2"
肛二244°18‘30.0〃
解:
未知导线点个数n-1=3,导线边数m=4,观测角个数n+1二5
近似计算导线边长.方位角和各导线点坐标,列于表3-2中
表3-3
近似坐标(m)
近似方位角
2(187966.645.29506889.655)
7;=67°14728.3"
3(186847.276,29507771.035)
炉141°47’00.5"
4(186760.011,29509518.179)
人二92°51f33.8"
5(184817.621,29509341.465)
7;=185°1T54.0"
兀二249°30724.0"
(1)组成改正数条件方程及第3点平差后坐标函数式
改正数条件方程闭合差项:
叫="<75一心)二3.9"
叫=一(百一孔)二-1.655=-(y4-yc)=1.7cm
改正数条件方程
%];—W1=0
【sin”•%]:
+2()6;&JX-兀)勺】:
_旳=0
V^+Vflz+Vfiz+VtU+臥-3・9二0
0・3868f-0.7857^2-0.0499^3-0.9959兀:
-1.8479卩如-1.1887^
一0.7614Vg+0.0857+1.6=0
0.9221%+0.6186兀:
:
+0・9988-0・0906%i-1.2502匕n-1.5267卩必
-0.9840",-0・9417*(-1.7=0
‘1111r
A=0.3868-0.7857-0.0499一0.9959-1.8479-1.1887一0.76140.0857
0.92210.61860.9988一0.0906-1.2502-1.5267-0.9840-0.9417©
=[3.9-1.6
1.7r
第3点平差后坐标函数式
AA
xy=Xj+AXj+Ax2=X]+$cos”+s2cos7^
夕3=儿+Ay,+Ay2=儿+5,sinf}+s2sinA
全微分得
dx3=[心7;曲]:
+匚[(儿-兀)〃0」:
P
d)3=[sin£叭]:
+丄[(勺一兀)妙】:
P
&二[0.3868-0.7857001.08650.4273000]r
鸟二[0.92210.618600-0.2662-0.5427000]r
(2)确定边角观测值的权
设单位权中误差&0=&,=±2・5”:
根据提供的标称精度公式%二5迦+5ppm呱计算测边中误差
根据(3-3-26)式,测角观测值的权为Pr二1:
为不使测边观测值的权与测角观测值的权相差过大,在计算测边观测值权时,取测边中
误差和边长改正值的单位均为厘米(cm)。
则可得观测值的权阵为
4.1
4.3
3.3
3
(3)组成法方程,计算联系数、改正数及观测值平差值,得
K=N^W=(AP^Ar)W=[3.2440-1.05993.4951]7>
V=P-|A7A:
=(0.68610.69651.07390.24630.8328-0.83210.61180.04253.2440)r
/A\
'1474.460
s2
1424.731
1749.342
1950.417
85°30'22・4”
\r5/
2543230.7*
131P434.6”
272。
2000.亍
244T8'36・5")
进一步计算各导线点的坐标平差值,得
1(187966.644,29506889.663):
2(186847.270.29507771.048);3(186760.000,29509518.201)
(4)精度评左
1)单位权中误差
vPV
6产土
2)点位中误差
权倒数:
03二氏厂人-冗占屮““厂人".6154
03=.f^P'lfyi-f^ATN-lAP-[fy5=0.2788
点位中误差:
&13=土&()y[Q^=±4・16cm=±&()=土1・8&协
6=±竝+叽±2.46曲
(注:
本资料素材和资料部分来自网络,仅供参考。
请预览后才下载,期待您的好评与关注!
)
 升级会员
升级会员 