mcu50技术说明.docx
《mcu50技术说明.docx》由会员分享,可在线阅读,更多相关《mcu50技术说明.docx(25页珍藏版)》请在冰豆网上搜索。
mcu50技术说明
分布式运动控制器MCU50(MotionControlUnit)技术说明
一、简介
基于CAN总线通讯方式的分布式运动控制器,通过对伺服驱动器的调节,来达到对AGV车体运动的精确控制,理论上最多可以挂接128个CAN节点设备。
由于每辆AGV车载设备的数量有限,实际应用时往往不超过4个。
每个运动控制器,不仅能够控制2个轴的伺服驱动器,还具有16个IO输入口、8个IO输出口、4个AD输入口和2个DA输出口。
而且,在升级版本中,还预留有16位的总线IO读写功能和串口编程功能。
二、技术指标
2.1电源
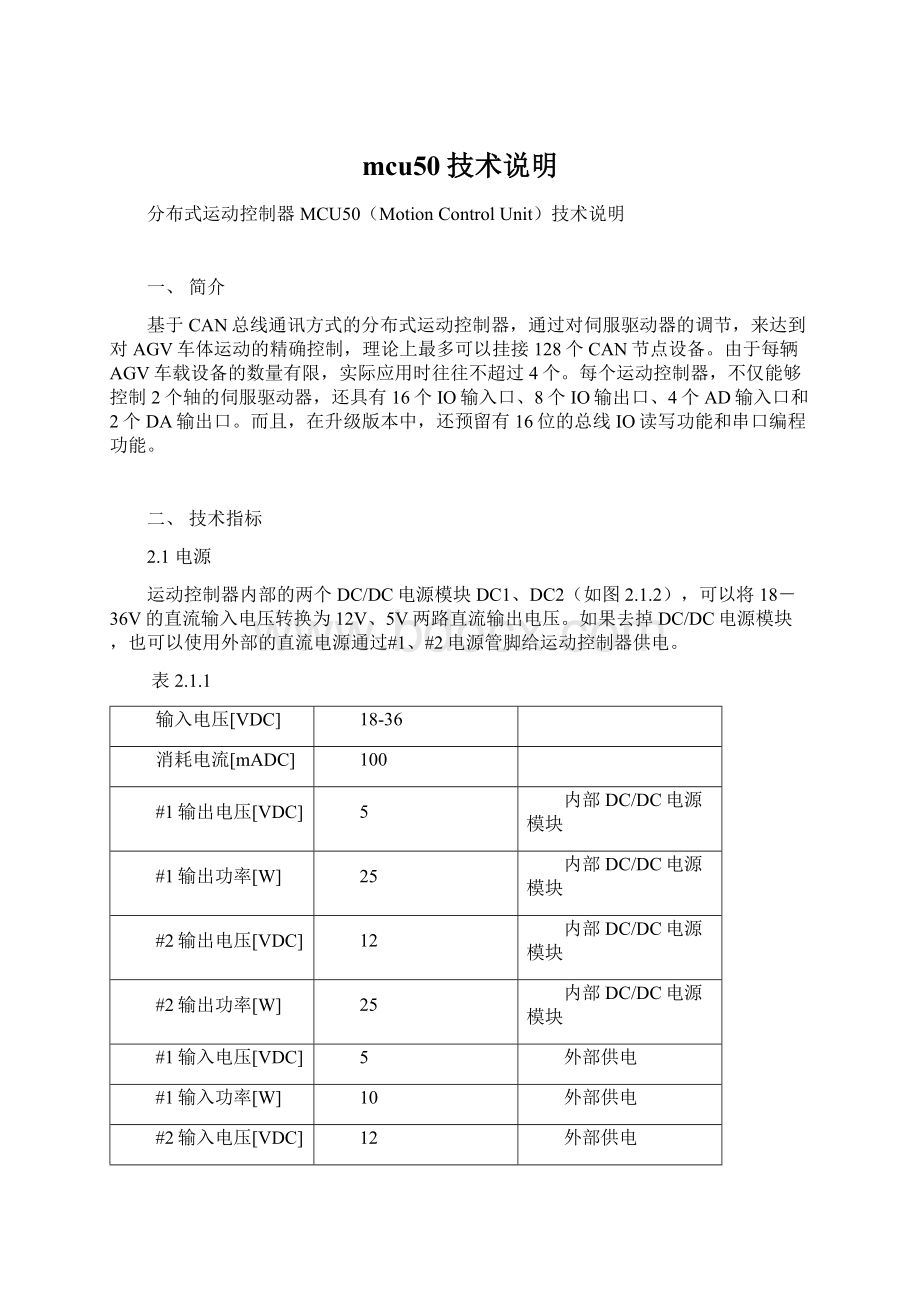
运动控制器内部的两个DC/DC电源模块DC1、DC2(如图2.1.2),可以将18-36V的直流输入电压转换为12V、5V两路直流输出电压。
如果去掉DC/DC电源模块,也可以使用外部的直流电源通过#1、#2电源管脚给运动控制器供电。
表2.1.1
输入电压[VDC]
18-36
消耗电流[mADC]
100
#1输出电压[VDC]
5
内部DC/DC电源模块
#1输出功率[W]
25
内部DC/DC电源模块
#2输出电压[VDC]
12
内部DC/DC电源模块
#2输出功率[W]
25
内部DC/DC电源模块
#1输入电压[VDC]
5
外部供电
#1输入功率[W]
10
外部供电
#2输入电压[VDC]
12
外部供电
#2输入功率[W]
10
外部供电
电源输入管脚
24VH、24VGND
#1电源管脚
VCC、5VGND
#2电源管脚
12V、AGND
图2.1.2
2.2通讯
运动控制器的CAN总线通讯部分与其它部分的电源是隔离的,这样就保证总线上产生的干扰不会影响运动控制器内部的其它电路。
使用时需要在CAN总线的首端和末端分别跨接1个120欧姆的匹配电阻(如图2.2.2),以减少线路上传输信号的反射。
表2.2.1
工作电压[VDC]
5
消耗功率[W]
<1
绝缘强度[VDC]
1500
通讯管脚
CANH、CANL
图2.2.2
2.3伺服驱动器控制
运动控制器的2对PWM脉宽调制管脚用来调节伺服驱动器的输出。
每对PWM管脚通过改变输出脉冲信号的占空比来控制伺服驱动器输出电压的方向和大小。
运动控制器的伺服输出禁止管脚可以禁止或使能伺服驱动器的输出(如图2.3.2)。
伺服驱动器的报警信号可以接入运动控制器的报警IO输入口。
伺服驱动器的正反向禁止信号可以接入运动控制器的普通IO输入口。
表2.3.1
PWM输出高电平[VDC]
12
PWM输出低电平[VDC]
<0.2
PWM频率[KHz]
<10
PWM占空比[%]
0-100
输出禁止高电平[VDC]
5
输出禁止低电平[VDC]
<0.2
#1PWM输出管脚
REFIN1+、REFIN1-
#2PWM输出管脚
REFIN2+、REFIN2-
#1输出禁止管脚
INH1
#2输出禁止管脚
INH2
#1报警输入管脚
FAULT1、FLTG1
#2报警输入管脚
FAULT2、FLTG2
图2.3.2
2.4编码器信号输入
运动控制器根据编码器信号的反馈输入,来进一步调节伺服驱动器的输出。
每个运动控制器可以处理2路差分增量式编码器的输入信号,编码器由5V直流供电。
表2.4
输出电压[VDC]
5
最大消耗电流[mADC]
200
电源输出管脚
VCC、5VGND
#1编码器信号输入管脚
MC1_A、MC1_/A,MC1_B、MC1_/B,MC1_Z、MC1_/Z
#2编码器信号输入管脚
MC2_A、MC2_/A,MC2_B、MC2_/B,MC1_Z、MC1_/Z
2.5模拟信号输入
运动控制器不仅能将4路0-12V的模拟信号转换为10位数字信号,而且提供了精确的2.50V电压基准。
表2.5
模拟信号输入数量
4
模拟信号输入范围[VDC]
0-12
转换精度[bit]
10
最小转换时间[ns]
425
基准电压[VDC]
2.50
基准输出电流[mADC]
20
基准精度[%]
0.2
基准温漂[ppm/℃]
50
模拟信号输入管脚
INA、INB、INC、IND
电压基准输出管脚
2.50V
2.6模拟信号输出
运动控制器提供了2路12位精度的0-10V模拟信号输出功能,模拟信号的输出管脚与伺服输出禁止管脚复用。
表2.6
模拟信号输出数量
2
模拟信号输出范围[VDC]
0-10
转换精度[bit]
12
最小转换时间[us]
1
模拟信号输出管脚
INH1、INH2
2.7IO输入
运动控制器有16个隔离的IO输入口,其中1-4具备单独隔离功能的双端输入管脚,5-16具备公共输入高端的NPN单端输入管脚(如图2.7.2)。
表2.7.1
IO输入数量
16
IO最大输入电压[VDC]
50
IO双端输入通道
1-4
IO单端输入通道
5-16
IO双端输入管脚
UP1、DOWN1,UP2、DOWN2,UP3、DOWN3,UP4、DOWN4
IO公共输入高端管脚
BTY24V
IO单端输入管脚
DOWN5、DOWN6、DOWN7、DOWN8、DOWN9、DOWN10、DOWN11、DOWN12、DOWN13、DOWN14、DOWN15、DOWN16
图2.7.2
2.8IO输出
运动控制器具有8个IO输出口,其中1-7为继电器输出,8为开关管输出(如图2.8.2)。
表2.8.1
IO输出数量
8
继电器输出通道
1-7
开关管输出通道
8
继电器负载电流[ADC]
1
开关管负载电流[ADC]
0.7
开关管输出电压[VDC]
24
继电器输出管脚
JKA1、JKB1,JKA2、JKB2,JKA3、JKB3,JKA4、JKB4,JKA5、JKB5,JKA6、JKB6,JKA7、JKB7
开关管输出管脚
JKA8、24VGND
图2.8.2
继电器输出开关管输出
三、物理指标
3.1物理指标
运动控制器的尺寸、重量等参数如下所示。
表3.1
尺寸[mm]
232×121×43
重量[kg]
1
工作场合
任意
3.2系统指示LED
运动控制器的30个系统指示LED,分别指示8个IO输出状态、16个IO输入状态和电源状态(如图3.2)。
图3.2
3.3安装尺寸
图3.3.1
图3.3.2
图3.3.3
图3.3.4
3.4连接器尺寸
运动控制器选用TYCO的42针、29针防尘连接器,具体型号为1-963224-1和1-963448-2(如图3.4)。
图3.4
四、环境指标
4.1环境说明
表4.1.1温度
工作温度[℃]
-15——+55
存储温度[℃]
-40——+80
表4.1.2相对湿度
工作[%]
<95
存储[%]
<95
表4.1.3防护等级
防护等级
IP51
灰尘
5级
水
1级
4.2机械振动测试
表4.2
振动频率[Hz]
55
振幅[mm]
2.0
轴
X,Y
持续时间[min]
10
4.3高低温测试
表4.3
循环次数
2
高温温度[℃]
80
高温持续时间[hour]
3
低温温度[℃]
-40
低温持续时间[hour]
3
温度变化率[℃/min]
1
五、功能指标
5.1功能概述
运动控制器依靠增量式编码器信号的反馈输入,完成对伺服驱动器的精确控制,从而控制2个电机的运动。
运动控制器主要提供以下功能:
●2路增量式编码器输入
●2对PWM输出
●2个伺服禁止输出
●2个伺服报警输入
●4路模拟信号输入
●2路模拟信号输出
●16路IO输入
●8路IO输出
5.2系统举例
图5.2
5.3管脚说明
图5.3连接器管脚定义
表5.3.1电源
管脚名称
管脚序号
第一功能
第二功能
24VH
2909
电源高输入
24VGND
2928
电源地输入
VCC
2929
#1电源高输出
#1电源高输入
5VGND
2919
#1电源地输出
#1电源地输入
12V
2910
#2电源高输出
#2电源高输入
AGND
2918
#2电源地输出
#2电源地输入
图表5.3.2通讯
管脚名称
管脚序号
第一功能
第二功能
CANH
2914
CAN高总线
CANL
2915
CAN低总线
图表5.3.3伺服驱动器控制和模拟信号输出
管脚名称
管脚序号
第一功能
第二功能
REFIN1+
2916
#1PWM正输出
REFIN1-
2926
#1PWM反输出
REFIN2+
2907
#2PWM正输出
REFIN2-
2917
#2PWM反输出
INH1
2927
#1伺服禁止输出
#1模拟信号高输出
INH2
2908
#2伺服禁止输出
#2模拟信号高输出
FAULT1
2905
#1伺服报警高输入
FLTG1
2906
#1伺服报警低输入
FAULT2
2924
#2伺服报警高输入
FLTG2
2925
#2伺服报警低输入
图表5.3.4编码器信号输入
管脚名称
管脚序号
第一功能
第二功能
MC1_A
4232
#1编码器A正相输入
MC1_/A
4218
#1编码器A反相输入
MC1_B
4216
#1编码器B正相输入
MC1_/B
4217
#1编码器B反相输入
MC1_Z
4230
#1编码器Z正相输入
MC1_/Z
4231
#1编码器Z反相输入
MC2_A
4206
#2编码器A正相输入
MC2_/A
4205
#2编码器A反相输入
MC2_B
4204
#2编码器B正相输入
MC2_/B
4203
#2编码器B反相输入
MC2_Z
4219
#2编码器Z正相输入
MC2_/Z
4233
#2编码器Z反相输入
图表5.3.5模拟信号输入
管脚名称
管脚序号
第一功能
第二功能
INA
4210
#1模拟信号输入
INB
4223
#2模拟信号输入
INC
4237
#3模拟信号输入
IND
4238
#4模拟信号输入
2.50V
4207
电压基准输出
图表5.3.6IO输入
管脚名称
管脚序号
第一功能
第二功能
UP1
4234
#1IO高输入
DOWN1
4220
#1IO低输入
UP2
4235
#2IO高输入
DOWN2
4221
#2IO低输入
UP3
4208
#3IO高输入
DOWN3
4209
#3IO低输入
UP4
4236
#4IO高输入
DOWN4
4222
#4IO低输入
BTY24V
4214
IO公共输入高端
DOWN5
4240
#5IO低输入
DOWN6
4225
#6IO低输入
DOWN7
4228
#7IO低输入
DOWN8
4242
#8IO低输入
DOWN9
4227
#9IO低输入
DOWN10
4241
#10IO低输入
DOWN11
4213
#11IO低输入
DOWN12
4226
#12IO低输入
DOWN13
4212
#13IO低输入
DOWN14
4239
#14IO低输入
DOWN15
4224
#15IO低输入
DOWN16
4211
#16IO低输入
图表5.3.7IO输出
管脚名称
管脚序号
第一功能
第二功能
JKA1
2920
#1继电器输出
JKB1
2911
#1继电器输出
JKA2
2912
#2继电器输出
JKB2
2901
#2继电器输出
JKA3
2921
#3继电器输出
JKB3
2902
#3继电器输出
JKA4
2913
#4继电器输出
JKB4
2903
#4继电器输出
JKA5
2922
#5继电器输出
JKB5
2904
#5继电器输出
JKA6
4215
#6继电器输出
JKB6
4229
#6继电器输出
JKA7
4201
#7继电器输出
JKB7
4202
#7继电器输出
JKA8
2923
#8开关管输出
5.4端口应用举例
每台AGV实际使用的运动控制器MCU50往往不超过4个,对于全方位车轮和差动车轮的AGV,尽量按照以下的例子配置输入输出端口。
图表5.4.1
MCU50-1
位
输出端口
用途
管脚定义
位
输入端口
用途
管脚定义
0
OUT1
ALLOK
2920、2911
0
IN1
磁导航传感器检测
4234、4220
1
OUT2
充电接触器
2912、2901
1
IN2
磁导航传感器检测
4235、4221
2
OUT3
抱闸控制
2921、2902
2
IN3
地标传感器检测
4208、4209
3
OUT4
启动灯控制
2913、2903
3
IN4
伺服上电检测
4236、4222
4
OUT5
停止灯控制
2922、2904
4
IN5
电量表输出检测
4240
5
OUT6
模式灯控制
4215、4229
5
IN6
电量表输出检测
4225
6
OUT7
自动下电控制
4201、4202
6
IN7
电量表输出检测
4228
7
OUT8
蜂鸣器音调
2923
7
IN8
启动开关检测
4242
8
INH1
伺服驱动禁止
2927
8
IN9
停止开关检测
4227
9
INH2
伺服驱动禁止
2908
9
IN10
模式开关检测
4241
10
REFIN1+
伺服驱动控制
2916
10
IN11
急停检测
4213
11
REFIN1-
伺服驱动控制
2926
11
IN12
4226
12
REFIN2+
伺服驱动控制
2907
12
IN13
4212
13
REFIN2-
伺服驱动控制
2917
13
IN14
4239
14
IN15
MCU50_ID
4224
15
IN16
MCU50_ID
4211
16
FAULT1
伺服驱动报错
2905、2906
17
FAULT2
伺服驱动报错
2924、2925
MCU50-2
位
输出端口
用途
管脚定义
位
输入端口
用途
管脚定义
0
OUT1
ALLOK
2920、2911
0
IN1
动态跟踪传感器检测
4234、4220
1
OUT2
2912、2901
1
IN2
急停检测
4235、4221
2
OUT3
抱闸控制
2921、2902
2
IN3
防碰传感器检测
4208、4209
3
OUT4
2913、2903
3
IN4
防碰传感器检测
4236、4222
4
OUT5
2922、2904
4
IN5
4240
5
OUT6
左灯控制
4215、4229
5
IN6
4225
6
OUT7
右灯控制
4201、4202
6
IN7
4228
7
OUT8
蜂鸣器音调
2923
7
IN8
手控盒信号检测
4242
8
INH1
伺服驱动禁止
2927
8
IN9
手控盒信号检测
4227
9
INH2
伺服驱动禁止
2908
9
IN10
手控盒信号检测
4241
10
REFIN1+
伺服驱动控制
2916
10
IN11
手控盒信号检测
4213
11
REFIN1-
伺服驱动控制
2926
11
IN12
手控盒信号检测
4226
12
REFIN2+
伺服驱动控制
2907
12
IN13
前侧保险杠检测
4212
13
REFIN2-
伺服驱动控制
2917
13
IN14
后侧保险杠检测
4239
14
IN15
MCU50_ID
4224
15
IN16
MCU50_ID
4211
16
FAULT1
伺服驱动报错
2905、2906
17
FAULT2
伺服驱动报错
2924、2925
MCU50-3
位
输出端口
用途
管脚定义
位
输入端口
用途
管脚定义
0
OUT1
ALLOK
2920、2911
0
IN1
4234、4220
1
OUT2
2912、2901
1
IN2
4235、4221
2
OUT3
抱闸控制
2921、2902
2
IN3
4208、4209
3
OUT4
2913、2903
3
IN4
4236、4222
4
OUT5
2922、2904
4
IN5
4240
5
OUT6
4215、4229
5
IN6
4225
6
OUT7
4201、4202
6
IN7
4228
7
OUT8
2923
7
IN8
4242
8
INH1
伺服驱动禁止
2927
8
IN9
4227
9
INH2
伺服驱动禁止
2908
9
IN10
4241
10
REFIN1+
伺服驱动控制
2916
10
IN11
4213
11
REFIN1-
伺服驱动控制
2926
11
IN12
4226
12
REFIN2+
伺服驱动控制
2907
12
IN13
4212
13
REFIN2-
伺服驱动控制
2917
13
IN14
4239
14
IN15
MCU50_ID
4224
15
IN16
MCU50_ID
4211
16
FAULT1
伺服驱动报错
2905、2906
17
FAULT2
伺服驱动报错
2924、2925
六、安全性
分布式运动控制器MCU50的一个基本特性是具有安全保护功能——用ALL-OK信号控制运动系统上电。
当运动控制器出现掉电、复位、看门狗超时等危险状况时,ALL-OK信号的输出将切断,保护系统安全。
运动控制器通过看门狗监控内部程序的执行和通讯超时。
另外,当编码器反馈错误时,运动控制器会通过限制舵和驱动伺服的输出来停止AGV的运动。
6.1执行
当各种危险状况出现时,运动控制器将依照以下2种情况之一执行:
●立刻切断ALL-OK信号进入安全状态;
●如果内部程序执行错误,或者工作电压过低,运动控制器将复位并在上电后重新启动。
6.1.1安全状态
运动控制器进入安全状态,将切断ALL-OK信号的输出,并通过CAN总线上传紧急信息和错误代码。
重新启动系统才能退出安全状态。
6.1.2复位和上电状态
从安全的角度考虑,复位和上电状态更象是一种特殊的安全状态。
此时,所有的IO输出包括ALL-OK信号无效,CAN总线尚未工作,对伺服驱动器尚未控制。
6.2设备监控
运动控制器能够安全监控多种重要设备,保证其在安全状况下工作。
6.2.1通讯监控
CAN正常通讯时被监控是否超时,只有收发正常,ALL-OK信号才可能输出。
6.2.2反馈监控
当控制参数被设置后,运动控制器将监控编码器的反馈信号。
主要通过预先设置的运动方向、运动距离与实际的运动方向、运动距离进行比较,当检测到反馈信号与设定值有偏差时,在规定时间内,控制器将校正输出。
否则,2种不同状况将被执行:
●减少输出到最大设定值;
●进入安全状态,紧急停车。
也可能在短暂的时间内将2种不同状况合并执行,首先减少伺服驱动器的输出,然后进入紧急安全状态。
控制器还可以监控以下错误:
●错误的电机运动方向(电机输入线接反,编码器反馈信号与预期相反);
●错误的编码器反馈方向(编码器A相和B相接反,编码器反馈信号与预期相反);
●编码器信号线的短路或者断路(编码器A相、B相、Z相出现同样信号或者无反馈信号);
●编码器与电机轴未连接(打滑情况无法检测);
●电机轴不转(防止过载或者电机被抱死);
控制器处于正常工作状态,监控才能被执行。
6.2.3编码器同步监控
例如舵,使用同步增量编码器时,同步信号被监控。
第一个同步脉冲被检测到之后,再经过同样位置时,下一个同步脉冲应该被检测到。
如果在允许的误差内没有检测到下一个同步脉冲,会被当作出错进入紧急安全状态,切断ALL-OK信号的输出,使运动系统下电,停止AGV的运动。
编码器同步监控也被用来检测分布在编码器信号上的电噪声。
6.2.4短路电流保护
当控制器负载过重,输出电流过大时,控制器电源模块将进入过流保护状态,使控制器上电重新启动。
6.2.5内部看门狗
控制器内部软件程序的执行由硬件看门狗监控,当软件程序跑飞失控时,看门狗输出复位信号,使控制器重新启动。
七、参考目录
VMC500TechnicalSpecification,35000-066A.PDF
VMC20SDIO-TechnicalSpecification,35000-067A.PDF
SafetyPresentation,35000-105.PDF
TMS320LF2407DSPCONTROLLERS,SPRS094F.pdf
 升级会员
升级会员 