自动控制原理习题doc.docx
《自动控制原理习题doc.docx》由会员分享,可在线阅读,更多相关《自动控制原理习题doc.docx(32页珍藏版)》请在冰豆网上搜索。
自动控制原理习题doc
《自动控制原理》习题
习题1
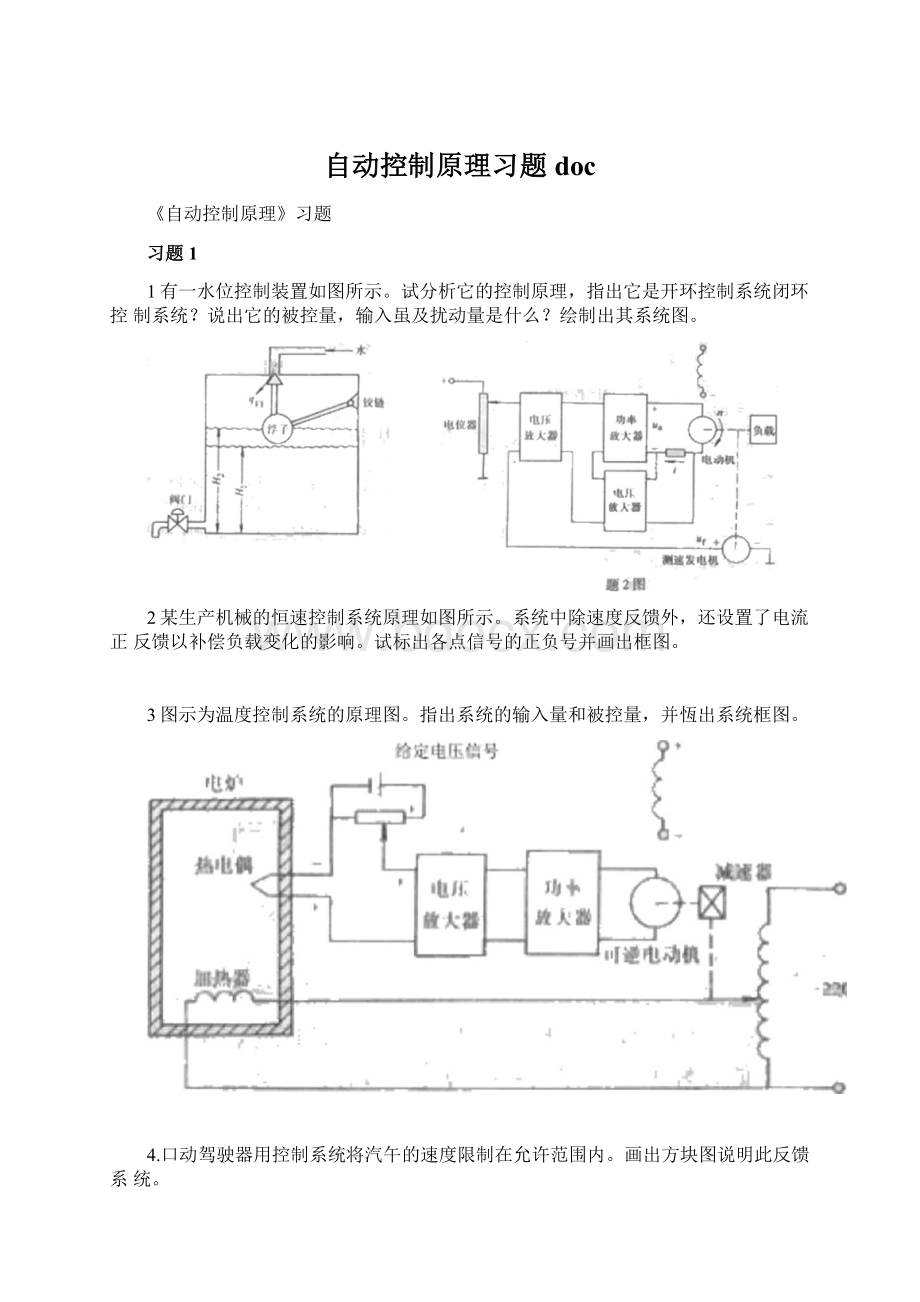
1有一水位控制装置如图所示。
试分析它的控制原理,指出它是开环控制系统闭环控制系统?
说出它的被控量,输入虽及扰动量是什么?
绘制出其系统图。
2某生产机械的恒速控制系统原理如图所示。
系统中除速度反馈外,还设置了电流正反馈以补偿负载变化的影响。
试标出各点信号的正负号并画出框图。
3图示为温度控制系统的原理图。
指出系统的输入量和被控量,并恆出系统框图。
4.口动驾驶器用控制系统将汽午的速度限制在允许范围内。
画出方块图说明此反馈系统。
5.双输入控制系统的一个常见例子是由冷热两个阀门的家用沐浴器。
目标是同时控制水温和流最,旳出此闭环系统的方块图,你愿总让别人给你开环控制的沐浴器吗?
6.开环控制系统和闭环控制系统各冇什么优缺点?
7.反馈控制系统的动态特性有哪几种类型?
生产过程希望的动态过程特性是什么?
习题2
1试分別写出图示各无源网络的传递函数DQWQ。
2求图示各机械运动系统的传递函数。
习题2图
3试分别写出图屮各有源网络的传递函数仏(s)/
习题3图
4交流伺服电动机的原理线路和转矩一转速特性曲线如图所示。
图中,u为控制电压.T
为电动机的输出转矩。
N为电动机的转矩。
由图可T与n、u呈非线性。
设在某平衡状态附
近用增量化表示的转矩与转速、控制电压关系方程为
陽、九为与平衡状态有关的值,对由转矩一转速特性曲线求得。
设折合到电动机的总转动惯虽为丿,粘滞摩擦系数为/,略去其他负载力矩,试写出交流伺服电动机的方程式并求输入为妬,输出为转角〃和转速为n时交流伺服电动机的传递函数
4何城(巧
习题4图
5图示一个转速控制系统,输入量是电压V,输出量是负载的转速0画出系统的结构图,并写出其输入输出间的数学表达式。
6已知一系统由如下方程组组成,试绘制系统框图,求出闭环传递函数。
七S)■4何召何-q®玛何】
竝S)・O»何益何
7系统的微分方程组如下:
曲@)■兀©■心的0)・":
丫>
其中Ko,K|,心T均为正常数。
试建立系统结构图,并求传递函数C(5)//?
(5),C(Q/M($)及C(s)/N2(s).
8试简化图中各系统结构图,并求传递函数C(s)/R(s)o
9试用梅逊公式求解习题8图所示系统的传递函数CCy)//?
(5)o
10考虑习题10图所示的结构图,试求出C($)/RG)。
习题10图
11已知系统结构图如习题11图所示,试写出系统在输入R©反扰动N(Q同时作用下输出C($)的表达式。
12已知系统结构如习题12图所示,试将其转换成信号流图,并求出C(s)/R(s).
(a)(b)
习题12图
13系统的信号流图如习题13图所示,试求C(5)//?
(.y)o
(b)
习题13图
14习题14图是一个模拟调节器的电路示意图。
(a)写出输入妬与输出%之间的微分方程;
(b)建立该调节器的结构图;
(c)求闭环传递函数Uc(s)/Ur(s)0
15某弹簧的力■位移特性曲线如习题17图所示。
在仅存在小扰动的情况下,当工作点分别为
旳二1.2、0、2.5时,试计算弹赞在工作点附近的弹,性系数。
40
30
20
10
0
-10
-20
-30
习题15图
16试求习题16图所示结构图的传递函数C(Q//?
(s)。
习题16图
17已知系统结构图如习题17图所示,求传递函数GG)/R心),C2(s)/Ri($),G(s)/R2(s),C2(s)/R2(s)o
习题17图
18放人器可能存在死区,其工作特性曲线如习题18图所示。
在近似线性工作区,可以用3次两数y=来近似描述放人器的输入■输出特性。
当工作点为^=0.6时,试选择a的合适取值,并确定放大器的线性近似模型。
习题3
1一单位反馈系统的开环传递函数为
求①系统的单位阶跃响应及动态性能指标。
%,t「tp②输入量为单位脉冲函数时系统的输出响应。
2设控制系统闭环传递函数为
%)■_———T
试在S平面上绘出满足卜•述要求的系统特征方程式根可能位于的区域。
(a)1>J$O.7O7,血22
(b)0.5M$>0,4*M2
(c)0.707莎>0.5,gW2
3—单位反馈系统的开环传递函数为
Gk(s)二3』/s(s+2&3n)
已知系统的r(t)=l(l),误差时间函数为
e(t)二1・4严-0・4"
求系统的阻尼比J|'|然振荡角耗率an、系统的闭环传递函数及系统的温态课差。
4已知二阶系统的闭环传递函数为
CW
确定在下述参数时的闭环极点,并求系统的单位阶跃响应曲线和和应的性能指标。
(a)$=2,5;
(b)Q1.2,©=5;
(c)当了$1.5时,说明是否可忽略距离原点较远的极点及理由。
5单位反馈系统的开环传递函数为
(a)求系统在单位阶跃输入信号r(r)=l(r)作用下的谋差函数久力
(b)是否可以用拉普拉斯变换的终值定理求系统的稳态误差,为什么?
6单位反馈系统的开环传递函数为
^"(s+lXfc^a+ico
(a)当K=1时,求系统在r(r)=l(/)作用下的稳态误差;
(b)当应)=1⑴吋,为使稳态误差%=0.6,试确定K值。
7已知单位反馈系统闭环传递函数为
W"<*+l-25r5+&ls2+2.61+10
(a)在单位斜坡输入时,确定使稳态误差为零的参数仇、切应满足的条件;
(b)在(a)求得的参数加、山下,求单位抛物线输入时,系统的稳态误差。
8系统结构图如习题8图所示。
(a)当r(t)=/,n(t)=t时,试求系统总稳态误差;
(b)当r{t)=l(r),n(t)=0时,试求巧八tpo
9设单位反馈控制系统的开坏传递函数为
试求当输入信号/■(/)=1+2什『2时,系统的稳态误差。
10有闭环系统的特征方程式如下,试用劳斯判据判定系统的稳定性,并说明特征根在复平面上的分布。
S3+20s2+4s+50=0
S4+2s3+6s2+8=0
S6+3s5+9s4+18s:
+22s2+12s+l2=0
11某控制系统如图3-47所示。
其屮控制器采用增益为倚的比例控制器,即GO二心,试确定使系统稳定的K“值范围。
习题11图
12某控制系统的开坏传递两数为
5■亦皿1)
试确定能使闭环系统稳定的参数K、卩的取值范围。
13已知某系统的结构与参数如习题13图所示。
(a)当输入/?
(s)=l/s,N(s)=0时,试求系统的瞬态响应;
(b)当输入/?
(s)=0,7V(s)=A/a•时,试分析干扰变化对系统的影响。
习题13图
14已知某系统的结构图如习题14图所示,其中系统的时间常数为严10秒和护50秒,
K=3。
试求/?
($)从1/s变化到2/s,且N(s)=\/s吋系统的瞬态响应,并求系统此吋的稳态误差细,其中E(s)=R(s)-C(s)0
习题14图
15已知系统结构图如习题15图所示。
(a)求K=3,r(0=t时的稳态误差;
(b)如果欲使%W0.01,试问是否可以通过改变K值达到,为什么?
16系统的结构图如习题16图所示,其中^=r-c,K、门、丁2均大于零。
(a)当0=1时系统是几型的?
(b)如果z、&)为单位阶跃函数,试选择0使系统的稳态谋差为零。
习题16图
17系统结构图如习题17图所示,其中€=「c,K】、卩均大于零。
(a)当K2=O时系统是几型的?
(b)如果厂⑴为单位斜坡函数,试选择©使系统的稳态谋差为零。
18设单位反馈系统的开坏传递函数为
*)■
fKf/3^lXr/6^O
若要求闭环特征方程根的实部均小于,试问K应在什么范围取值?
如果要求实部均小于-2,情况又如何?
19某系统的闭环传递函数为
试分析零点・3和极点・8对系统瞬态性能(如超调量、调整时间等)的影响。
20某闭环系统的结构图如习题20图所示,其中7■分别0,0.05,0.1和0.5o
(a)分别计算系统的单位阶跃响应,并画出相应的响应曲线。
在此棊础上,求出系统的超调量、上升时间和调整时间;
(b)讨论厂对系统响应的影响,并比较开环零点-1/2■与闭环极点的位置关系。
习题20图
21某闭环系统的结构图如习题21图所示,其屮7■分别0,0.5,2和50
(a)分别计算系统的单位阶跃响应,并画出相应的响应1111线。
在此基础上,求出系统的超调量、上升时间和调整时间;
(b)讨论丁对系统响应的影响,并比较开环极点与闭环极点的位置关系。
习题21图
22某闭环系统的结构图如习题22图所示,其控制器的零点可变。
(a)分別计算d=0和aH0吋系统对阶跃输入的稳态误差;
(b)画出6/=0,10和100这3中情况下系统对阶跃干扰的响应曲线,并在比较的基础上,从。
的3个取值屮选择最佳值。
23电枢控制直流电动机的结构图如习题23图所示。
(a)试计算系统对斜坡输入r(r)=t的稳态误差,其中K加=10,^=0.05,K为待定参数。
如果要求稳态谋差等于1,试确定K的取值;
(b)画出系统在0勺<20秒时间段的单位阶跃响应曲线和单位斜坡响应曲线,试问这两种响应曲线都可以接受吗?
24试选择K]和K2的值,使图3・64所示系统阶跃响应的峰值时间为0.5秒,超调最可以忽略不计(即0.5%<超调量<2.0%)o
习题24图
25控制系统的结构图如习题25图所示。
(a)确定该闭环系统的2阶近似模型;
(b)应用2阶近似模型,选择增益K的取值,使系统对阶跃输入的超调最小于15%,稳态误差小于0.12o
习题25图
26设单位反馈系统的开环传递函数分别为
1Gk(s)二K(s+l)/s(sT)(s+5)
2Gk(s)=K/s(s-l)(s+5)
试确定分别使闭环系统稳定的开环增益的取值范围。
习题4
设开环系统的零、极点在S平面上的分布图如下图所示,试绘制相应的根轨迹草图。
题1图
2已知系统的特征方程为
(1)
⑵++-0
试绘制以疋■为参数的根轨迹图。
3设单位反馈系统的开环传递函数
(1)试绘制系统根轨迹大致图形,并分析系统的稳定性。
(2)若增加一个零点z=-l,试问根轨迹图有何变化,对系统稳定性有何影响。
4已知单位负反馈系统的开环传递函数
试用根轨迹法来确定使闭坏主导极点的阻尼比X0.5和口然角频率5=2时的瓦取值。
5设负反馈系统的开环传递函数为
K
s(0.Ofe+5(0-02s+D
(1)作出系统准确的根轨迹;
⑵确定使系统临界稳定的开环增益礼;
⑶确定少系统临界阻尼比相应的开环增益-F-o
6单位负反馈系统的开环传递函数为
%)
^+iax«+20)
试绘制系统的根轨迹图,并确定产生纯虚根士J】时的z值和K•值。
7设控制系统的开环传递函数如下,试画出参数b从零变到无穷吋的根轨迹图。
%)
8设控制系统的开环传递函数为
试画岀系统分别为正反馈和负反馈时的根轨迹图,并分析它们的稳定性。
9已知正反馈系统的开环传递函数为
10非最小相位系统的特征方程为
c”w环-iXsf丈3十4)・0
试绘制该系统的根轨迹图。
11已知非最小和位负反馈系统的开环传递函数为
试绘制该系统的根轨迹图。
12反馈系统的开环传递函数为
试川根轨迹法确定系统无超调响应时的开环增益-:
lo
13设负反馈控制系统的开环传递函数为
GW再O)
证明系统的根轨迹含有圆弧的分支。
14如习题14图所示控制系统
(1)画出系统的根轨迹图;
(2)求系统输出c(t)无振荡分量时的闭环传递函数。
C®
习题14图
15设负反馈系统的开环传递函数为
(<-1-2)
试绘制系统根轨迹的大致图形。
若系统
(1)增加一个Z二5的零点;
(2)增加一个z二2.5的零点;
(3)增加一个z=・0.5的零点。
试绘制增加零点后系统的根轨迹,并分析增加开环零点后根轨迹的变化规律和对系统性能的影响。
16已知负反馈系统的传递函数为
G(・)・°■
如1)
(1)利用Matlab有关函数作出0⑵讨论a值变化对系统动态性能及稳定性的影响(017设单位反馈系统的开环传递函数
若要求系统的增益为D=90,试求a为何值才能满足闭环系统最大超调量%118%的要求?
习题5
1若系统单位阶跃响应
y(Z)=l-1.8e4f+0.8e'9tt>=0
试求系统频率特性。
2已知单位反馈系统的开环传递函数如卜-,试绘制具开环频率特性的极坐标图。
%)
(1)
%)
(2)
%)
(3)
(4)
20
(7)
(8)
(9)
(10)
3已知某系统的开环传递函数为
K«*i)
应用奈氏判据判断闭环系统的稳定性。
4设系统的开环传递函数为
试画出下面两利惴况下系统的极处标图
(1)51>^>o,Z>盂>6(2^>Z>o.7[>7;>a
5设一反馈控制系统的特征方程为
宀如+(2*r+3)tf+10-0
应用奈氏判据确定使闭环系统稳定的K的数值,再用劳斯判据检验得到的结果。
6绘出下列传递函数的幅相特性
%)
+2*4*0.8«*D
7设系统的开环对数幅频特性的分段直线近似表示如图所示(设为最小线性相位系统)。
试写出系统的开环传递函数。
-40dB/dec
8设系统的开环幅和频率特性如图所示。
试判断闭环系统的稳定性。
图屮,P表示系统开环极点在右半s平血上的数目。
若闭环不稳定,试计算在右半s平血的闭环极点数。
.250况卄50)
.250
/(”妙
250
250
兀#对・15)
10已知系统开坏传递函数分别为
(DO(«)-
6
0(0.25^4-l((0.06tf*D
.7X0-&+0
ffa(0.025ff*IXp.006ff^O
试绘制伯德图,求相位裕量,并判断闭环系统的稳定性。
11设单位反馈系统的开环传递函数为
%)
当输入信号r(t)=5sin2ir时,求系统的稳态误差。
12单位反馈系统的开环传递函数为
%)■:
«(0.087«*0
试用频域和时域关系求系统的超调量§%及调节时间h
13设一单位反馈控制系统的开环传递函数
(1)确定使系统的谐振峰值脸=1.4的K值。
(2)确定使系统的幅值裕度GM=20db的K值。
(3)确定使系统的相角裕量厂5)=60时的值。
习题6
1单位反馈系统的的开环频率特性为
25
jafjm+9(0.・[)
为使系统具有45*5的相角裕度,试确定:
(1)串联相位超前•校疋装置;
(2)串联相位滞示校正装置;(3)串联相位滞后一超前校正装置。
2设单位反馈系统的开环传递函数为
CO.Ofe*i)
为使系统具有如卜性能指标:
加速度课差系数瓦谐振峰值MyMLM谐振频率叫■W。
试川期望对数频率法确定校止装置的形式和特性。
3设单位反馈系统的开环传递函数为
设计一•校正装置,使静态速度谋差系数瓦°旳,并使闭环主导极点位于s=-2±j23o
4设单位反馈系统的开环传递函数为
K
5(5+3)(5+9)
(1)如果要求系统在单位阶跃输入作用卜-的超调量b・2mb,试确定K值。
(2)根据所确定的K值,求出系统在单位阶跃输入下的调节时间厂,以及静态速度谋羌系数。
⑶设计-串联校正装置,使系统2盘必减少两倍以上。
5已知单位反馈系统开环传递函数为
设计校正网络,使赛八処八抄应H耳。
6由实验测得单位反馈二阶系统的单位阶跃响应如习题6图所示
要求:
(1)绘制系统的方框图,并标出参数值;
(2)系统单位阶跃响应的超调量,峰值时间•=05^设计适当的校止环节并应出校正后系统的方框图。
7设原系统的开环传递函数为
要求校正后系统的相角裕度尸・6亍,幅值裕度K旷6分贝。
(1)试求串联超前校正装迸;
(2)试求串联滞示校正装置
(3)比较以上两种校正方式的特点,得出何结论。
8设控制系统的开环频率特性为
要使系统的相角裕度卩・35\系统的加速度误差系数Ka=10,试用频率法设计申联超
询校正装置。
9反馈控制系统的开坏传递函数为
采用串联超前校正,使系统的相角裕度^>45*,在单位斜坡输入下的稳态课差为ess=0.1,系统的剪切频率小于7.5弧度/秒。
10设单位反馈控制系统的开环传递函数为
%)
若使系统的相角裕度r"45°,速度谋差系数K、,二8,试设计串联滞后校正装迸。
11系统如习题11图所示,其屮R:
R?
和C组成校正网络。
要求校正后系统的稳态谋差为ess=0.01,相角裕度r^60度,试确定K,R:
R?
和C的参数。
12反馈系统的结构图如习题12图所示,为保证系统有45度的相角裕度,求电容c为多少?
习题12S
13已知单位反馈控制系统的开环传递函数为
试设计串联校正环节,使系统的相角裕度尸2,剪切频率耳‘Prodis。
14某单位反馈系统开环传递函数为
%)
现要求胚・门叫・20样210,试确定串联校正装置。
15设控制系统的开环传递函数为
%)
要求校正后系统的相对谐振峰值Mr=1.4,谐振频率叫试设计串联校正环节。
16设控制系统的开环传递函数为
若使闭环系统的谐振峰值Mr=1.25,谐振频率叫■沏系统的速度误差系数
K八375秒-i,试设计滞示■超前校正装置。
17控制系统的开环传递函数为
要使系统的相和裕度尸》40*,单位斜坡输入时系统的稳态误差试用频率法设计串联滞后•超前校正网络。
18设I型系统的开环传递函数为
9(0.0150*1)
试川希望特性法确定使系统达到I、•列性能指标的校正装登:
(1)稳态速度误差系统总=150秒-1;
(2)超调量(3)调节时间耳40-5#\
19控制系统如习题19图所示。
6
1+0.25?
?
%)
引入反馈校正叭■
1+2*,试确定校正示系统的相角裕度。
习题19a
20最小相位系统校正丽、后的开环对数幅频特性如习题20图所示曲线1,11.
(1)画出串联校正装置的对数幅频特性;
(2)写出串联校正装置的传递函数。
习题7
1试求日"的Z变换。
2已知
o试求Z(z)o
4已知
5根据下列G(s)求取相应的脉冲传递函数G(z)o
0)OW・
K«(ff+a)
G)OW
l-卢Kg0(ff+<0
6试分析图示离散系统的输出表达式Y(z)o
7离散系统如图所示(T=ls)o求1)当K=8时分析系统的稳定性。
2)当系统临界稳定吋K的取值。
题7图
8系统结构图如图所示,其中£=10,71=0.2s,输入函数r(t)=1(C+f+0.5斤求系统的稳态误差。
9系统结构图如图所示。
求当Ts=ls时和E=0.5s时,系统的临界K值。
10离散系统下,图中o(tf),试确定使系统稳定时,《的取值范围,并确定采
样周期7:
对系统稳定性的影响(Q0)。
11系统结构图如图所示,图中Q(Q・匚一,。
试绘制GG5)的
«sfy*1)
对数频率特性(伯徳图),并求出相角稳定裕度等于45度时斤的取值。
习题8
1判断下图所对应的系统是否稳定;T/N(A)与G(j\v)的相交点是否为稳定的自持震荡点。
2非线性系统如图所示。
试用描述函数法,确定线性部分的传递函数如下列情况时,系统是否产牛•自持震荡,若产生自持震荡,求自持震荡的频率及振幅。
图中,G(s)有两种情况:
20
*0.0(«+3)
3非线性系统如图所示。
试用描述函数法,分析K=10时,系统的稳定性,并求K的临界值。
图屮
4非线性系统如图所示。
试确定自原的振幅和频率。
图中,<Jg)
5非线性系统如图所示。
设沪1,23用描述函数法分析系统的稳定性,为了使系统稳定,继
2
电器的参数a、b应如何调整。
图中,O@)・=
s(p.5s+1Xs+D
6非线性系统如图所示。
用描述函数法确定自震荡的频率和振幅。
图中,
%)
7非线性控制系统如图所示。
试用描述函数法分析系统的稳定性。
图屮
8非线性系统如图所示,试用描述函数法讨论系统发住日持震荡时,参数KI、K2、M、T1、
T2应满足的条件。
图中,
%)
题8图
 升级会员
升级会员 