技术规范书附件附件二远程电调天线接口要求中国电信基站天线集中采购项目标包2.docx
《技术规范书附件附件二远程电调天线接口要求中国电信基站天线集中采购项目标包2.docx》由会员分享,可在线阅读,更多相关《技术规范书附件附件二远程电调天线接口要求中国电信基站天线集中采购项目标包2.docx(29页珍藏版)》请在冰豆网上搜索。
技术规范书附件附件二远程电调天线接口要求中国电信基站天线集中采购项目标包2
中国电信基站天线(2018年)集中采购项目标包2技术规范书附件4
附件二:
远程电调天线接口要求
1概述
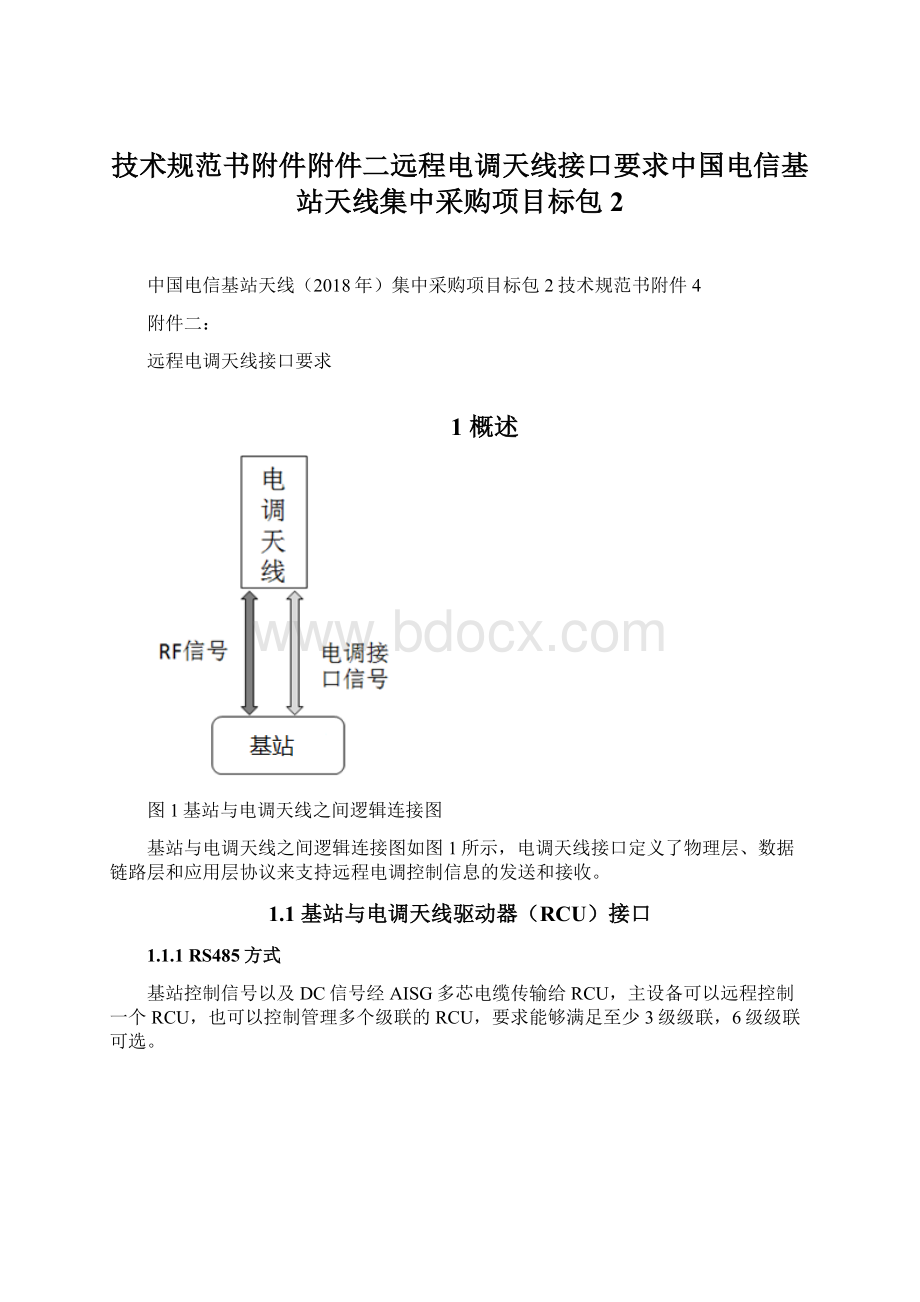
图1基站与电调天线之间逻辑连接图
基站与电调天线之间逻辑连接图如图1所示,电调天线接口定义了物理层、数据链路层和应用层协议来支持远程电调控制信息的发送和接收。
1.1基站与电调天线驱动器(RCU)接口
1.1.1RS485方式
基站控制信号以及DC信号经AISG多芯电缆传输给RCU,主设备可以远程控制一个RCU,也可以控制管理多个级联的RCU,要求能够满足至少3级级联,6级级联可选。
图2RS485连接方式
1.1.2调制解调方式
基站通过外置或内置BT将控制信号调制为频率2.176MHz的OOK信号,与DC信号一起通过RF同轴电缆传输到SBT,由SBT完成OOK信号与RS485信号的互相转换。
图4中的BSmodem为BT,Antennamodem为SBT
图3调制解调方式
图4BT外置的调制解调方式
图5BT内置的调制解调方式
1.1.3支持远程电调的功能要求
要求所有电调天线必须支持远程遥控电调的功能,电调驱动电机(RCU)可采用外置或内置方式(内置RCU必须可插拔),优选内置方式。
同时,针对可插拔方式RCU在出厂前要求完成配置数据加载。
远程遥控电调的控制方式有以下两种:
方式一、图6左侧所示为通过基站网管控制电调的方式,控制信息通过基站网管下发给基站,通过基站射频电缆将控制信号传达给RCU,由RCU完成对电调天线电下倾角的调整。
方式二、图6右侧所示为通过基站网管控制电调的方式,控制信息通过基站网管下发给基站,通过基站电调口将控制信号传达给RCU,由RCU完成对电调天线电下倾角的调整。
以上两种方式中建议优先选用方式二。
针对远程水平方位角控制方式有以下两种(对二维可调类型天线为必选,其他类型天线为可选):
方式一:
图7左侧所示RAS内置在天线内部,通过与RCU控制口级联。
控制信息通过基站网管下发给基站,通过基站射频电缆将控制信息传送给RCU,进行水平方位角调整。
方式二、图7右侧所示RAS内置在天线内部,通过与RCU控制口级联,控制信息通过基站网管下发给基站,进行水平方位角调整。
卖方应承诺能够按照买方要求进行免费的产品更新或升级。
防雷性能要求:
直接接地
图6远程遥控电调的控制方式
图7远程水平方位角的控制方式
2电调天线接口物理层
具体内容参考3GPPTS25.461和AISG2.0,如果发生冲突情况下,以3GPPTS25.461为准。
3电调天线接口数据链路层
数据链路层遵守ClassUNC1,15.1TWA方式的HDLC格式(参照ISO/IEC13239(3rdEdition,2002-07))。
具体内容参考3GPPTS25.462和AISG2.0,如果发生冲突情况下,以3GPPTS25.462为准。
4电调天线接口应用层
具体内容参考3GPPTS25.466和AISG2.0,如果发生冲突情况下,以3GPPTS25.466为准,以下内容是在协议基础上增加的内容。
4.1单天线基本操作命令
4.1.1校准
电调天线在支持角度最小值和最大值分别设置两个卡点,当接收到校准命令,从设备应驱动驱动器在整个角度范围内移动,首先进行两个卡点之间行程的测量,并与配置文件中总行程进行对比(要求配置文件中的总行程与实际天线的总行程误差不大于±5%),如果行程一致,再根据校准前停留的位置停留到相应的位置,且校准时间不应超过4分钟。
如果行程不一样,校准失败,产生未校准告警。
如果校准期间断电或复位,产生未校准告警。
如果校准过程中堵转,产生堵转告警和未校准告警,此时校准响应信息中应包含未校准错误代码(0X0E)和堵转告警代码(0X03)。
本文中提到的堵转告警,都返回(0X03)
如果校准期间发生空转,产生未校准告警
表74校准命令
命令名:
校准
编码:
0x31
发起者:
主设备
命令类
1
下载模式:
不支持
功耗:
高
表75校准命令初始信息参数及格式
序号
长度(字节)
类型
描述
None
0
None
无数据
表76校准命令响应信息参数及格式
序号
长度(字节)
类型
描述
1
1
返回码
OK
表77校准命令返回码
OK
FAIL
注解
格式错误(FormatError)
忙(Busy)
硬件错误(HardwareError)
软件丢失(WorkingSoftwareMissing)
电机堵转(MotorJam)
驱动器堵转(ActuatorJam)
未配置(NotConfigured)
未校准(NotCalibrated)
命令不支持(UnsupportedProcedure)
4.1.2设置角度
如果在调节角度时堵转,产生堵转告警和未交准告警。
如果在从设备调节角度时断电或复位,产生未校准告警。
如果设置角度期间发生空转,产生未校准告警。
表82设置角度命令
命令名:
设置角度
编码:
0x33
发起者:
主设备
命令类别:
1
下载模式:
不支持
功耗:
高
表83设置角度命令初始信息参数及格式
序号
长度(字节)
类型
描述
1
2
有符号整型
角度值
表84设置角度命令响应信息参数及格式
序号
长度(字节)
类型
描述
1
1
返回码
OK
表85设置角度命令返回码
OK
FAIL
注解
格式错误(FormatError)
忙(Busy)
硬件错误(HardwareError)
软件丢失(WorkingSoftwareMissing)
电机堵转(MotorJam)
驱动器堵转(ActuatorJam)
未配置(NotConfigured)
未校准(NotCalibrated)
超出范围(OutOfRange)
命令不支持(UnsupportedProcedure)
4.1.3告警上报
从设备通过这个过程给主设备上报告警状态的变化。
这个过程只有当最新的复位过程执行后,并且执行了告警订阅功能后,才能被执行。
告警上报功能由主设备发送告警订阅命令AlarmSubscribe使能;AlarmSubscribe第一次使能后,上报当前存在的告警。
状态标识=0指告警状态消除。
状态标识=1指告警状态产生。
可上报的告警包括:
传动系统堵转(ActuatorJam),未校准(NotCalibrated),未配置(NotConfigured),硬件故障(HardwareError),传动系统异常(ActuatorInterference),参考附录1。
表90告警上报命令
命令名:
告警上报
编码:
0x07
发起者:
从设备
命令类别:
2
下载模式:
不支持
功耗:
低
表91告警上报命令初始信息参数及格式
序号
长度(字节)
类型
描述
2i–1
1
无符号整型
返回码
2i
1
无符号整型
状态标识i
i=1…N
4.1.4设置设备数据
当接收到设置设备数据命令时,将把消息中的参数填写到数据区域中,可选的配置数据在附录2中列出。
定义天线模块相关信息信息:
频段、波宽、增益、天线型号为只读,当主设备试图将数据写入到只读的区域时,从设备就返回ReadOnly,且忽略要写入的数据。
当主设备试图写入的域为从设备不支持的域,从设备就返回UnknownParameter,且忽略主设备试图写入的数据。
表92设置设备数据命令
命令名:
设置设备数据
编码:
0x0E
发起者:
主设备
命令类别:
1
下载模式:
不支持
功耗:
低
表93设置设备数据命令初始信息参数及格式
序号
长度(字节)
类型
描述
1
1
无符号整型
域号,参见附录2
2
参见附录2
参见附录2
数据
表94设置设备数据命令响应信息参数及格式
序号
长度(字节)
类型
描述
1
1
返回码
OK
表95设置设备数据命令返回码
OK
FAIL
注解
格式错误(FormatError)
忙(Busy)
软件丢失(WorkingSoftwareMissing)
硬件错误(HardwareError)
只读(ReadOnly)
未知参数(UnknownParameter)
4.2多单元天线基本操作命令
4.2.1天线校准
天线在支持角度最小值和最大值分别设置两个卡点,当接收到校准命令,从设备对应的子单元应驱动器在整个角度范围内移动,首先进行两个卡点之间行程的测量,并与配置文件中进行对比,如果行程一样,再根据校准前停留的位置停留到相应的位置,且校准时间不应超过4分钟。
如果校准期间断电,产生未校准告警。
如果校准过程中堵转,产生堵转告警和未校准告警,此时校准响应信息中应包含未校准错误代码和堵转告警代码。
如果校准期间发生空转,产生未校准告警。
表100天线校准命令
命令名:
天线校准
编码:
0x80
发起者:
主设备
命令类别:
1
下载模式:
不支持
功耗:
高
表101天线校准命令初始信息参数及格式
序号
长度(字节)
类型
描述
1
1
无符号整型
天线子单元号
表102天线校准命令响应信息参数及格式
序号
长度(字节)
类型
描述
1
1
无符号整型
天线子单元号
2
1
返回码
OK
表103天线校准命令返回码
OK
FAIL
注解
格式错误(FormatError)
忙(Busy)
硬件错误(HardwareError)
软件丢失(WorkingSoftwareMissing)
电机堵转(MotorJam)
驱动器堵转(ActuatorJam)
未配置(NotConfigured)
未校准(NotCalibrated)
命令不支持(UnsupportedProcedure)
如果主设备指定的子单元号不存在,则从设备返回格式错误。
4.2.2天线设置角度
如果子单元在调节角度时堵转,产生堵转和未校准告警。
如果子单元在从设备调节角度时断电或复位,产生未校准告警。
如果设置角度期间发生空转,产生未校准告警。
表104天线设置角度
命令名:
天线设置角度
编码:
0x81
发起者:
主设备
命令类别:
1
下载模式:
不支持
功耗:
高
表105天线设置角度初始信息参数及格式
序号
长度(字节)
类型
描述
1
1
无符号整型
天线子单元号
2
2
有符号整型
角度值
表106天线设置角度响应信息参数及格式
序号
长度(字节)
类型
描述
1
1
无符号整型
天线子单元号
2
1
返回码
OK
表107天线设置角度响应返回码
OK
FAIL
注解
格式错误(FormatError)
忙(Busy)
硬件错误(HardwareError)
软件丢失(WorkingSoftwareMissing)
电机堵转(MotorJam)
驱动器堵转(ActuatorJam)
未配置(NotConfigured)
未校准(NotCalibrated)
超出范围(OutOfRange)
命令不支持(UnsupportedProcedure)
如果主设备指定的子单元号不存在,则从设备返回格式错误。
4.2.3天线告警上报
多天线从设备使用天线告警上报过程上报天线告警状态改变。
这个过程只有在从设备复位,并且执行了告警订阅过程后才能执行。
多天线设备仅仅针对多天线特殊告警使用这个天线告警上报过程。
针对每一次告警,当且仅当在上次告警后的周期时间内状态发生变化后,才上报告警状态和告警码。
至少一个多天线的特定告警报告后,一个天线告警上报过程将执行。
告警订阅使能之后,第一次天线告警上报程序上报当前激活的告警。
Stateflag=0指告警状态消除。
Stateflag=1指告警状态产生。
表120天线告警上报
命令名:
天线告警上报
编码:
0x85
发起者:
从设备
命令类别:
2
下载模式:
不支持
功耗:
低
表121天线告警上报命令初始信息参数及格式
序号
长度(字节)
类型
描述
1
1
无符号整型
天线子单元号
2i
1
无符号整型
返回码i,见附录1
2i+1
1
无符号整型
状态标识i
i=1…N
4.2.4天线设置设备数据
当接收到设置设备数据命令时,从设备子单元根据初始信息提供的域号保存相应的数据,域号定义参照附录2。
从设备子单元可根据需要,将某些域设计成只读。
要求天线模块相关信息信息:
频段、波宽、增益、天线型号为只读,当主设备试图将数据写入到子单元的这些域时,从设备子单元就返回ReadOnly,且忽略要写入的数据。
当主设备试图写入的域为从设备子单元不支持的或不存在的域,从设备子单元就返回UnknownParameter,且忽略主设备试图写入的数据。
表112天线设置设备数据命令
命令名:
天线设置设备数据
编码:
0x83
发起者:
主设备
命令类别:
1
下载模式:
不支持
功耗:
低
表113天线设置设备数据命令初始信息参数及格式
序号
长度(字节)
类型
描述
1
1
无符号整型
天线子单元号
2
1
无符号整型
附录2
3
附录2
附录2
设置的数据
表114天线设置设备数据命令响应信息参数及格式
序号
长度(字节)
类型
描述
1
1
无符号整型
天线子单元号
2
1
返回码
OK
表115天线设置设备数据命令返回码
OK
FAIL
注解
格式错误(FormatError)
忙(Busy)
硬件错误(HardwareError)
软件丢失(WorkingSoftwareMissing)
只读(ReadOnly)
未知参数(UnknownParameter)
命令不支持(UnsupportedProcedure)
如果主设备指定的子单元不存在,则返回格式错误。
4.3相对水平方位角调整操作命令(对二维可调类型天线为必选,其他类型天线为可选)
为支持远程水平方位角控制,建议优先参考AISG2.0的扩展协议“RemoteAzimuthSteeringExtensiontothecontrolinterfaceforAntennaLineDevices”(RAS),实现远程相对水平方位角控制。
同时,如果设备网管不具备RAS功能,天线设备软件通过将RAS设备虚拟为RET设备实现。
4.3.1基于RAS协议的操作命令
4.3.1.1校准
当接收到校准命令,从设备对应的子单元应驱动器在整个角度范围内移动,首先进行两个卡点之间行程的测量,并与配置文件中进行对比,如果行程一样,再根据校准前停留的位置停留到相应的位置。
校准时间不能超过4分钟。
表100天线校准命令
命令名:
RAS校准
编码:
0x80
发起者:
主设备
命令类别:
1
下载模式:
不支持
功耗:
高
表101天线校准命令初始信息参数及格式
序号
长度(字节)
类型
描述
1
1
无符号整型
天线子单元号
表102天线校准命令响应信息参数及格式
序号
长度(字节)
类型
描述
1
1
无符号整型
天线子单元号
2
1
返回码
OK
4.3.1.2设置角度
该角度的设置指相对水平方位角设置:
1)当相对角度为0时,天线反射板与天线罩背面平行
2)从天线顶部俯瞰,当天线反射板顺时针转动时,为正向转动,角度增加。
当天线反射板逆时针转动时,为负向转动,角度减少。
在支持的角度范围内能够进行角度设置,设置角度的响应时间不能超过2分钟。
表82设置角度命令
命令名:
设置角度
编码:
0x81
发起者:
主设备
命令类别:
1
下载模式:
不支持
功耗:
高
表83设置角度命令初始信息参数及格式
序号
长度(字节)
类型
描述
1
1
无符号整型
子单元号
2
2
有符号整型
角度值
表84设置角度命令响应信息参数及格式
序号
长度(字节)
类型
描述
1
1
无符号整型
子单元号
2
1
返回码
OK
表85设置角度命令返回码
OK
FAIL
注解
格式错误(FormatError)
忙(Busy)
硬件错误(HardwareError)
软件丢失(WorkingSoftwareMissing)
电机堵转(MotorJam)
驱动器堵转(ActuatorJam)
未配置(NotConfigured)
未校准(NotCalibrated)
超出范围(OutOfRange)
4.3.1.3告警上报
参考4.1.3
4.3.2基于RET协议方式
如果设备网管不具备RAS功能,要求天线设备软件上通过将RAS设备虚拟为RET设备,基于RET协议实现:
✓设备安装完成后,在基站设备网管上执行扫描、配置。
扫描到虚拟的RET设备序列号包含RAS标识(在网管上显示到的RET序列号后三位为RAS),以便后台网管人员能够清楚识别是RET设备还是RAS设备。
✓基站设备网管上执行校准、角度设置时,如果是对虚拟RET设备执行,天线设备软件上能够识别是针对RAS设备,并进行远程方位角调整相关操作。
5机械性能要求
一般结构要求:
电调结构应牢固可靠,便于安装、使用和运输。
6稳定性要求
电调的使用寿命不低于10年,在使用寿命期间,保持产品性能满足技术指标要求。
7电调天线电机驱动模块环境条件要求
在以下环境条件中,保持产品性能满足技术指标要求。
7.1电机驱动模块可靠性要求
内置、外置电机驱动模块应保证其MTBF(平均故障间隔时间)不低于50000小时。
7.2电机驱动模块的防水、防尘和温度要求
在天线安装之后除漏水孔外,应满足IEC60529规定的IP65防尘和防水密封性要求。
应满足在-40℃~+60℃的室外环境正常使用。
7.3电机驱动模块的端口防雷要求
电机驱动模块的AISG端口,应满足YD5098规定的冲击电流8/20us,10KA防护等级要求。
7.4电机驱动模块的电磁兼容性要求
表138电机驱动模块(RCU)应满足如下电磁兼容性要求
项目
测试条件及判据
参考标准
RE
30M~1G,距离10米
ClassB
GB9254
EN55022
CE
0.15-30MHz,
ClassB
GB9254
EN55022
RS
80-2700MHz,10V/m,3m
ClassA
GB/T17626.3
EN300386/EN301489-1
CS
0.15-80MHz,
ClassA
GB/T17626.6
EN300386/EN301489-1
ESD
接触放电±8KV,空气放电±15KV
ClassB
GB/T17626.2
EN300386/EN301489-1
SURGE
1.2/50us,差模±1KV,共模±2KV
正负各5次,1次/分钟
ClassB
GB/T17626.5
EN300386/EN301489-1
EFT
共模耦合+/-2KV,2minutes
ClassB
GB/T17626.4
EN300386/EN301489-1
备注:
ClassA:
设备性能不容许变化,或者变化在产品规格书规定的范围内。
ClassB:
设备在测试过程中,性能降低容许超过产品规格书要求的范围,但干扰消除后,设备能恢复正常,不允许出现复位和任何方式的人工干预。
8附录
8.1附录1
从设备返回码及说明
码
名称
说明
告警
Download模式
0x00
成功
正常返回
×
0x02
马达堵转
电动机不能移动
0x03
驱动器堵转
电动机可以移动,但调节器不能移动
×
0x05
系统忙
系统忙于处理之前的命令,对当前命令不响应
0x06
校验错误
数据校验错误
0x0B
失败
非正常响应,请求未被成功执行
×
0x0E
未校准
设备为进行校准或校准失效
×
0x0F
未配置
无法找到调节器预置数据
×
0x11
硬件故障
包含各种硬件故障
×
×
0x13
超出范围
给定的参数超出了范围
×
0x19
未知消息码
接收到的消息码未定义
×
0x1D
数据只读
使用不合法的设备参数
×
0x1E
未知参数
该处理不支持某些参数
×
0x21
软件缺失
工作在Download模式返回。
×
0x22
文件内容错误
下载的文件格式或大小错误
×
0x24
格式错误
消息标识的子天线非法或数据长度与标识的不一致或消息处理不一致
×
0x25
命令不支持
该类设备不支持该种操作
0x26
无效流程序列
软件下载流程错误
0x27
驱动器异常
RET不能控制调节器运行。
×
注0x代表十六进制。
8.2附录2
8.2.1附录2.1
对于RET类型的SET/GET设备数据的附加段的格式说明
子命令码
长度(字节)
类型
描述
0x01
15
ASCII
天线模式号
0x02
17
ASCII
天线序列号
0x03
2
16-bitunsigned
天线工作频段,参见附表2-1
0x08
2
16-bitunsigned
天线工作频段,参见附表2-2
0x09
2
16-bitunsigned
天线工作频段,参见附表2-3
0x04
8
4*16-bitunsigned
工作频段的波束宽度
0x05
4
4*8-bitunsigned
工作频段增益
0x06
2
16-bitunsigned
最大支持倾角
 升级会员
升级会员 