探月卫星同波束VLBI差分相位时延闭合计算与分析.docx
《探月卫星同波束VLBI差分相位时延闭合计算与分析.docx》由会员分享,可在线阅读,更多相关《探月卫星同波束VLBI差分相位时延闭合计算与分析.docx(15页珍藏版)》请在冰豆网上搜索。
探月卫星同波束VLBI差分相位时延闭合计算与分析
探月卫星同波束VLBI差分相位时延闭合计算与分析
探月卫星同波束VLBI差分相位时延闭合计
算与分析
第28卷第4期
2010年12月
天文学进展
PROGRESSINASTR0N0MY
Vl01.28.
Dec..
NO.4
2010
文章编号:
1000—8349(2010)04—415—09
探月卫星同波束VLBI差分相位时
延闭合计算与分析
陈明1,2,刘庆会
(1.中国科学院上海天文台,上海200030;2.中国科学院研究生院,北京100049)摘要:
针对同波束干涉测量中差分相位时延模型验证,解算结果周跳检测与校正问题进行分析.
给出了相位闭合和差分相位时延闭合计算原理与方法,并以SELENE任务中解算的差分相位时延
数据为算例进行分析,差分相位时延闭合计算结果小于几皮秒.验证了差分相位时延基于同一波前
的模型,可用于对差分相位时延中周跳问题进行检测,可对数据波动情况进行监视,为数据后处理
提供依据.在实际应用中,该方法可随着数据处理过程的推进同步进行,因此,十分有利于同波束
干涉测量方法的实时实施,并应用于卫星导航.
关键词:
月球探测;同波束干涉测量;差分相位时延闭合
中图分类号:
P184.5文献标识码:
A
1背景介绍
月球重力场的测定是研究月球内部结构及其演化的重要依据.俄罗斯与美国均发射过多
颗卫星进行月球重力场的测定与研究,并取得丰硕成果.但在月球重力场的测定上仍有两方面
的问题需要解决:
一是缺少月球重力场背面的测量信息;二是月球侧面重力场模型精度不高,
这主要是因为传统的多普勒和距离测量对与视线垂直方向不敏感所致.日本SELENE探月卫
星的科学目标之一就是采用新的测量方式获取更精确的重力场模型.SELENE卫星于2007
年9月14日发射升空,该卫星由1个三轴稳定的主卫星和2个自由飞行自旋稳定的小卫星组
收稿日期:
2010—01-09;修回日期:
2010.04.22
基金项且:
国家自然科学基金资助项目(11043004,11703048);上海市浦江人才计划资助项目(10PJ1411700);
上海市空间导航与定位技术重点实验室开放课题(Y054262001);中国科学院百人计划
416天文学进展28卷
成.2个小卫星分别被称为Rstar和Vstar[,主卫星在100km高度的近圆极轨上运行,2
个小卫星由主卫星释放后分别进入100kin~2400kin和100kin~800km高的极月椭圆轨道
运行.当主卫星进入月球背面以后,Rstar在主卫星和地面站间起到中继作用,实现对月球背
面的四程多普勒测量,该测量可对月球背面重力场模型进行改善f2j.在Rstar和Vstar间进
行差分VLBI测量,可提高作为数据中继的Rstar的位置确定精度;差分VLBI测量
也有利于
改善月球边缘重力场模型精度.
Rstar和Vstar分别发送3个s波段载波(2212MHz,2218MHz,2287MHz)和1个x波段载波(8456MHz).在Rstar和Vstar间获得4个载波频点的差分相关相位,采用同波
束干涉测量技术(SBI)获取高精度相对角位置测量信息[引.在SBI测量中,地面接收天线在
同一个主波束内同时接收到Rstar和Vstar信号,经差分处理后,来自大气,电离层和接收机
的误差基本消除[,差分相位时延(DPD)测量精度可达几皮秒.在多频点同波束观测中,
各基线整周模糊度通过不同频点间的差分相关相位直接导出,并受严格条件约束【引.在x波
段可获得更高测量精度,但x波段SBI观测要求角距小于0.1.(天线直径为20m时),观测
机会不足其观测弧段的6%,这对于确定月球重力场模型是远远不够的.2008年3月以后,
VLBI观测方式更改为天线直接对准Rstar和Vstar夹角中线,对S波段分离角约束增大为不
超过0.56o.
2SBI测量方法
SELENE的VLBI观测网由4个位于日本,口径为20m的天线网(VERA)和4个国际
站组成,4个国际站分别位于中国上海(25m),中国乌鲁木齐(25in),澳大利亚Hobart(26
m)和德国~Vettzell(20in).基线长度从796km至12247km.VERA承担了VLBI观测的主要任务,从2007年11月至2009年2月它参与了大约1600h的观测,包括对Rstar,
Vstar,主卫星和射电源的观测,2009年2月以后用于观测Vstar和主卫星.4个国际
站分
别于2008年1月,5—7月,2009年2月参与了对Rstar和Vstar的共约200h的观测[引.
从2007年l1月至2008年2月,SBI跟踪采取天线对准Rstar和Vstar夹角中线,同
时跟踪两个目标的方式,跟踪条件为夹角小于0.1.,这是兼顾S波段和x波段.若夹角大于
0.1.采取交替跟踪Rstar或Vstar的方式,若Rstar和Vstar夹角小于0.3.,则s波段SBI跟
踪可以实现.2008年3月至12月,SBI跟踪条件改为夹角小于0.56.,这是为了更好地获得
S波段的跟踪数据,该方式下约69%跟踪弧度可获取SBI观测数据,当然在夹角小于0.1.时
仍可获得x波段跟踪数据.0.56.夹角的选取是综合考虑了天线相位特性,指向特性及前期
在此之前的SBI观测中,当天线对准Rstar或Vstar时,在夹角小数据处理情况[引,
于0.3.
条件下一般可解出整周模糊数.在2008年共179d的VLBI观测中,S波段SBI观测弧长约
为476h,平均每天观测弧长为2.66h.当Rstar和Vstar的轨道面朝向地球时,1d的跟踪
弧长可超出5h,而这正好有利于反映出月球侧面重力场特性.
多频点SBI(MFSBI)数据处理计算方法可参见文献[3]和【7],这里不再详述.在MFSBI
4期陈明,等:
探月卫星同波束VLBI差分相位时延闭合计算与分析4171.5
1
罂
蜷
嚣
罂0.
5
肇
冁
O
Ishlgaki(2008-05-24T17:
00)
a':
一C
等1'.=30o
J
tar
r
lF-PCIIF-PC鑫l上J厶,I蕾一l{i上i』IlLlLjlj1.
O2o406o8o100频率/kHz
'.S
1
馨
蜷
靛
窭0,5
馨
辖
嚣
O
频率/kHz
Sh宣?
haj(2008-05-24T17:
00)
eRF4,CaI
=141.E=23o
tBr.
IF-PCal
btarIFilF-PCaif}lL.…....."..1..."O2O
1.5
1
肇
蜷
.;譬
罂0
.5
O
dki(2008-05-24T17:
00)
RI,Calb
270A=149a.VI龌{
lF—PCalIF中CBl
iJlkI.0Lkt?
I.LJ一.i1O2O408o80100
频率/kHz
dRF—'CaI
160'.五l置38
Rsta~
lF中CIt曩rFCaIIi
l
;j{
j』址I^tw.jL【I1.{i血
.S
1
馨
蜷
兹
0.5
频率/kHz
Urumql(2008-05.251"00:
00)
fRF腑l8tar=209o.'8.IF-PCaltarIF
}
f
}'
}
l……ILL-'.一.…l…...
g'同:
一CaI
A=310.F=68o
tar.
,JItarJF一,C.1
{i
IF-PCa1I.一,….—.i-频率/kHz
1.5
1
孽
蜷
韶
罂0,5
2040808o100
频率/kHz
Wetlzell(2008-0~25T00:
00)
h;,c曩l'1
V0tar
A=139..E=7o
Bstar
F中C8IF-PCa
.L.?
'?
.?
d—L
O2o406080100
频率/kHz
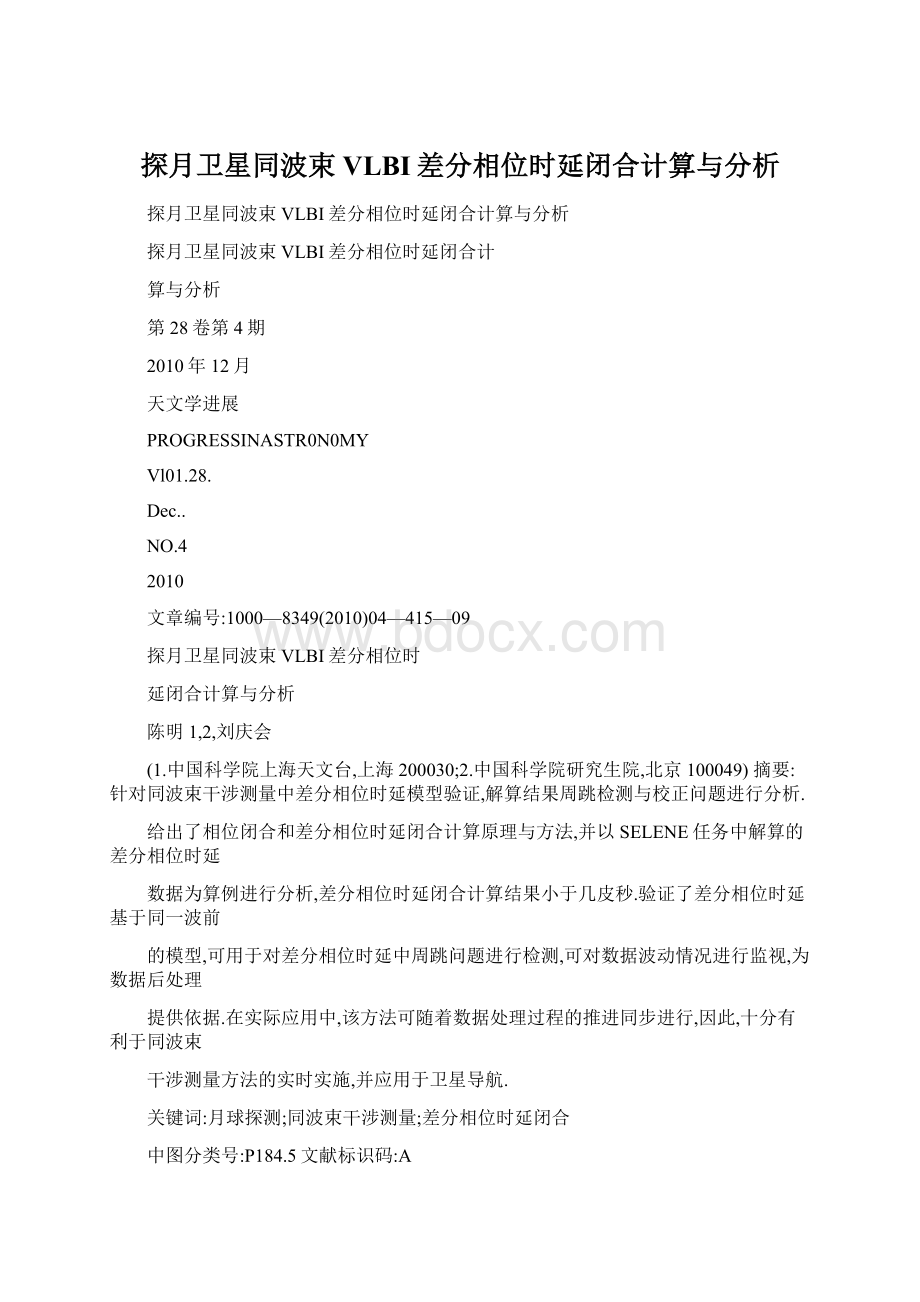
图1SELENE中SBI观测站信号频谱相对振幅关系图
a,b,C,d为VERA4个站的信号频谱;e,f为中国的上海站,乌鲁木齐站信号频谱g为澳大利亚的Hobart站信号频谱;h为德国的Wettzell站信号频谱
418天文学进展28卷
解算条件严格满足的情况下可以正确求解相位时延.一般相位时延的解算基于同一波前的假
设,即相位时延是由于同一波前相位到达不同测站的时间差引起的,该条件可以通过对解算
结果的相位闭合计算来验证.在实际测量中,由于观测系统中各种因素和大气导致的相位抖
动及电离层扰动产生的影响[引,使相位出现较大的波动,一般需要先经过积分处理后才可以
正确解算出相位时延.在实际解算中也存在模糊度不能正确解算的情况,即解算结果中含有周
跳,这主要由以下两方面原因造成:
在观测中为获取尽可能长的SBI观测弧长,常允许Rstar
和Vstar有较大的角距离,而大的角距直接导致两个卫星信号传播路径的大气波
动和电离层
抖动存在较大的差异,两者差分后仍存在较大的残余量;同样为了增加观测弧长,跟踪中将天
线对准Rstar和Vstar的中线,因此导致信噪比降低,不利于信号的检出.此外,VERA系统本身存在较大的装置噪声,导致有些噪声谱线比Rstar/Vstar的信号谱
线还强,由于Doppler效应,导致有时信号和噪声无法分离.图1给出了1组信号频谱相对
振幅关系图.为便于进行信噪比的比较,图中各信号振幅统一相对于Rstar信号振幅.图中可
见,上海,乌鲁木齐,Hobart和Wettzell4站噪声较少,而VERA4站无线电干扰较多.这是
因为上海,乌鲁木齐,Hobart及Wettzell4站采用喇叭口型馈源,波束宽度较窄,馈源舱内
其他装置产生的干扰不易进入接收机;VERA系统4个站馈源不是喇叭口型,是由螺旋天线
阵组成,螺旋天线波束很宽,且VERA天线馈源舱内有很多电子装置,如K波段,Q波段
的接收机和其他电器装置,致使其干扰较多.图l给出的是角距较小时的信号频谱情况,随
着RStar和VStar间角距的增大,接收信号强度将进一步降低.上述原因导致相位有时存在
较大波动和不连续.若波动超出了解算要求的条件,则会产生周跳.目前作者正在进行这方面
的研究工作,以期在误差较大时仍能有效地解算出差分相位时延.时延闭合常用来作为计算结果的检测【,但关于高精度相位时延闭合的讨论很少.下面将首
先给出相位时延闭合计算原理分析,然后给出差分相位时延闭合计算原理分析,并以SELENE
中的差分相位时延数据为例进行具体的计算分析,最后给出结论.3相位时延闭合计算原理及算例分析
相位时延闭合计算基本依据为同一波前传输原理,即相位时延为同一波前到达两个测
站的时间差.设有3个地面站A,B,C,来自同一信号源信号的同一波前到达各站的时刻分别记为tA,tB,tc,则各基线的时延定义为:
基线AB,TAB=tB—tn,对于基线AB,A为参考站,B为从属站(以下与此相同);基线AC,TAC:
tc—tA;基线BC,丁BG=tc—tB.显然有,TAB=一丁BA,TAC=一亿A,TBC=一丁CB.数据时标一般定义在基
站数据时刻,因而TAB,TBA对应的数据时标分别为,tB.则同一波前相位时延闭合计算式为:
TABc=TAB+713c+TCA:
0.在数据相关处理过程中,一般在同一时刻得到多
条基线的相位时延值,而不是不同基线的同一波前的相位时延值因此这里分为两种情况
进行相位时延闭合计算分析:
一是考虑同一时刻相位时延闭合,二是修正数据至同一波前
相位时延闭合.
4期陈明,等:
探月卫星同波束VLBI差分相位时延闭合计算与分析4193.1相位时延闭合计算
由3条基线同一时刻的3个相位时延数据,直接进行相位时延闭合计算.设同一数据时刻
为t,相位时延量分别为TAB,TAC,TBC,则相位时延闭合计算为:
TABC=TAB—TAC+TBC.
修正上式中的时延数据,使它们对应到同一波前.由于基线AB,基线AC对应同一参考
站,故TAB,TAC是同一波前信号引起的时延;而该波前到达B站的时刻tB由时延TAB确
定为:
tB=tn+TAB,于是可将BC基线的时延TBc插值到同一波前的B时刻得到相应的
时延,.线性插值实现方式如下:
若TAB>0,贝0c=TBC+TAB[TBC(凡+1)一TBC]/[tA(n+1)一tA];若TAB<0,则c=TBC+丁AB[丁Bc一丁Bc(他一1)]A—tA(n一1)].式中:
礼一1为前一时刻点数值,n+1为后一时刻点数值.新的相位时延闭合计算公式为:
Bc=TAB—TAC+c.若相位时延闭合计算结果为0或近于0,则称基线间的相位时延闭
合.由上述计算结果可以判断3站组成的3条基线相位时延是否闭合及闭合程度.对于多站(3站以上)构成的多基线情况,可以推知:
若多站中的任意3站相位时延闭合,则多站任意组合的相位时延仍然闭合;否则,若多站相位时延不闭合,则至少有1组3
站相位时延不闭合.如对于A,B,C,D这4站,则有TABCD=TAD+TBC+TCD+TDA=
(TAB+TBC+TCA)+(TAC+TCD+TDA)若任意3站相位时延闭合,上式右端为0(或近于
0),则TABCD=0(或近于0),这说明该4站相位时延闭合.这样,多站相位时延闭合分析
可完全转化为3站相位时延闭合分析.故应用中仅需对任意3站相位时延闭合情况进行
分析即可.
3.2算例分析
以2008年5月20日Rstar预报时延为例,计算分析相位时延闭合情况.时延数据为
ISGK(Ishigaki),IRIK(Iriki),MZSW(Mizusawa)3站组成的3条基线相应的数据.分别进
行同一时刻相位时延闭合计算与将相位修正到同一波前的相位时延闭合计算,结果如图
2所示.
0.
j匠
划
理
.0.
?
,
血
压
划
鲁
器
图2闭合相位计算实例
420天文学进展28卷
由图2可见,同一时刻相位时延闭合计算结果为lns,修正至同一波前的相位时延闭合计算结果为1—2ps.这表明依据同一波前计算的相位时延闭合计算结果精度更高.同
一
时刻相位时延闭合计算结果约为1ns,这主要是由于相位时延波前没有对齐引起的,
考虑到时延测量精度已接近这一水平,因此对相位时延数据进行相位修正至同一波前是
必要的.修正后相位时延闭合计算结果最大可达几皮秒,这主要是计算误差和采用的线
性修正模型引入误差造成的.这一结果同时验证了预报时延使用的模型为同一波前相位
到达各站时间差.
4差分相位时延闭合计算原理及算例分析
4.1差分相位时延闭合计算原理分析
设tA时刻,差分相位时延为?
7_黯V.基线分别为AB,Ac,Bc,则3条基线的差分相位
时延闭合.事实上,由差分相位时延定义可知,对基线AB,AC,BC,差分相位时延分别为,
?
?
V=(嗜一喽)一
(一),?
V:
(一喽),
(一),?
V:
(嗤一嗤)一
(一)
若时延对应同一波前,则差分相位时延闭合计算为?
RB-cV:
?
V,?
V+?
琵V=0,即差分相位时延闭合.否则,若时延对应同一时标,则须将数据修正至同一波前后再进行差分
相位时延闭合计算.修正方法与相位时延波前修正类似.但由于Rstar和Vstar为两个独立的
飞行器,严格来说对同一波前的修正应分开进行.但Rstar和Vstar位置十分接近,其时延量
也很接近,故其时延量可近似认为一致.差分相位时延线性修正与相位时延线性修正的差分
相等,即(?
嚣V)=()一().而相位时延线性修正已在上文论述.修正后的差分相位时延闭合计算公式为?
『ARB-cV=(?
彘V一?
彘V+?
彘V)+(?
V).差分相位时延闭
合计算可依此公式计算.
4.2算例分析
以2008年5月22日ISGK,MZSW,IRIK3站组成的3条基线测量数据为例,差分相位时延闭合计算结果如图3所示.图中可见修正后的差分相位时延闭合计算结果显着减小,
其均值基本为零.
l
履
茁
氇
罂
VERAISGK-VERAMZSW-VERAIRIK
8
划
翟
坦
HOBART-vERAMZSW.vERAIRIK
【}
一一一一一一一一,:
;i_—
:
量刚刻
图3差分相位时延闭合计算图4存在周跳差分相位时延闭合计算4期陈明,等:
探月卫星同波束VLBI差分相位时延闭合计算与分析421计算同一天HOBART,MZSW,IRIK3测站组成的3条基线的差分相位闭合计算结果如图4所示.图中可见,修正至同一波前的差分相位时延闭合计算结果波动显着减小,
但数据并不近于零,而是接近于另外1个约13cm的常数,该值十分接近于s波段的一个
波长,这说明差分相位时延数据中存在周跳,幅度大小为1周.该周跳在差分相位时延
比较图3与图4可知,该周跳发生在与闭合计算时引入并被保留在计算结果中.
HOBART
站有关的1条基线中,因而基本可以判定周跳与HOBART站的数据有关.下面的例子将
说明如何确定发生周跳的基线,以及如何根据差分相位时延闭合计算结果对发生周跳的
数据进行修正.对于2008—10—16T13:
30—14:
00的数据进行差分相位时延闭合计算,结果如
图5所示.
I,
蚕
葛
2008—10-16丁
VERAlSGK-VEPAlRI^,EfOGSW
I
星
I
疑
刨
蕾
*
图5ISGK—IRIK—OGSW-MZSW4站中任意3站组合差分相位时延闭合计算4站中任意3站组合差分相位时延闭合计算结果如图5所示,其中不含基线ISGK—
OGSW的组合差分相位时延闭合,而含有基线ISGK.OGSW的组合差分相位时延闭合
计算结果存在周跳,因而可以确定基线ISGK—OGSW数据中存在一个正向周跳.将基线
ISGK—OGSW差分相位时延数据校正后重新进行差分相位时延闭合计算,结果如图6所
示,可见校正后的差分相位时延闭合.
对于较长观测弧段的差分相位时延闭合计算结果表明,不同时段数据质量存在差异,
有时可达数毫米.抖动较大的差分相位时延闭合计算结果表明,差分相位时延数据本身
抖动较大,这主要是因为角距较大时,大气和电离层的相位变化在SBI中还有一些影响
所致.
422天文学进展28卷
VERAISGK-VERAIRIK-VERAOGSWVERAISGK-VERAMZSVv-VERAOQSW
5结论
图6修正ISGK—OGSW基线数据中周跳后的差分相位时延闭合计算分析表明,差分相位时延闭合计算方法正确,经修正至同一波前的差分相位时延闭合
计算结果闭合程度显着好于同一时刻差分相位时延闭合效果,这说明实测数据处
理结果
与用于差分相位时延闭合计算使用的同一波前的模型有较好的吻合,该方法可以
实现对
相位时延同一波前模型的验证.差分相位时延闭合计算结果可以用于SBI差分相
位时延
计算中的周跳监测与校正.差分相位时延闭合计算结果还可以用于差分相位时延
数据质
量的评定,那些相位抖动较大的差分相位时延数据,其差分相位时延闭合计算结果
也呈
现出较大的抖动.差分相位时延闭合计算的这些功能对于SBI处理结果的评估,校
正与
选用有着重要的意义.本文给出的差分相位时延闭合计算结果精度在1mm精度水
平,
这对于模型的验证,周跳的监测与校正,数据质量的监视来说是足够的.若要求更
高的精
度,则需要具体分析导致11Tim量级偏差存在的原因,如数据本身变化范围,基线长
度,
同一波前差分相位时延修正方法等.
参考文献:
『l111wataT,TakahashiM,NamikiN,eta1.JournaloftheGeodeticSocietyofJapan,2001,4
7:
558
f2]NamikiN,1wataT,MatsumotoK,eta1.Science,2009,323:
900『3]3KonoY,HanadaH,PingJ,eta1.EarthPlanetsSpace,2003,55:
581『4]4LiuQ,MatsumotoK,KikuchiF,eta1.IEICEJB,2006,J89B—B:
602
f51LiuQ,KikuchiF,MatsumotoK,GoossensS,etal,RadioScience,2010,45:
RS2004
f61LiuQ,KikuchiF,WsurutaS,eta1.IEEETrans,AntennaandPropa.,2007,55:
1466
f71KikuchiF,LiuQ,HanadaH,eta1.RadioScience,2009,44:
1f81郑为民,张秀忠,舒逢春.天文学进展,2005,23:
272
4期陈明,等:
探月卫星同波束VLBI差分相位时延闭合计算与分析423
CalculationandAnalysisofSameBeamVLBIDifferentialPhase
DelayClosureofLunarSatellite
CHENMing,一.LIUQing—hui
(j.ShanghaiAstronomicalObservatory,ChineseAcademyofSciences,Shanghai200030,China;2?
Graduate
SchoolofChineseAcademyofSciences,Beijing100049,China)
Abstract:
Thepaperfocusesonverifyingthedifferentialphasedelaymodel,detectingandcorrectingthecycleambiguityexistinginthedifferentialphasedelaydataofsame—
beamVLBI.
Weconfirmthemethodsofcalculatingthephasedelayclosureandthedifferentialphasedelayclosurewiththesamewavefront.Weusethemethodtoanalyzethedifferentialphasedelaydata
ofthesame—
beamVLBIfromSELENEproject.Theresultofthedifferentialphasedelayclosureislessthanseveralpicoseconds.Themethodinthearticlecanbeusedtoverifythesamewavefrontdifferentialphasedelaymodal,todetectandcorrectthecycleambiguityexistinginthedifferentialphasedelaydata.Itcanalsobeusedtomonitorthefluctua
 升级会员
升级会员 