整理现代控制实验5.docx
《整理现代控制实验5.docx》由会员分享,可在线阅读,更多相关《整理现代控制实验5.docx(14页珍藏版)》请在冰豆网上搜索。
整理现代控制实验5
现代控制理论实验报告
专业:
自动化班级:
自动F1207姓名:
吴育敬
学号:
201223911313完成日期:
2014.12.17成绩评定:
1、实验题目
状态反馈控制器设计
2、实验目的
1.掌握状态反馈和输出反馈的概念及性质。
2.掌握利用状态反馈进行极点配置的方法。
学会用MATLAB求解状态反馈矩阵。
3.掌握状态观测器的设计方法。
学会用MATLAB设计状态观测器。
4.熟悉分离定理,学会设计带有状态观测器的状态反馈系统。
3、实验过程及结果
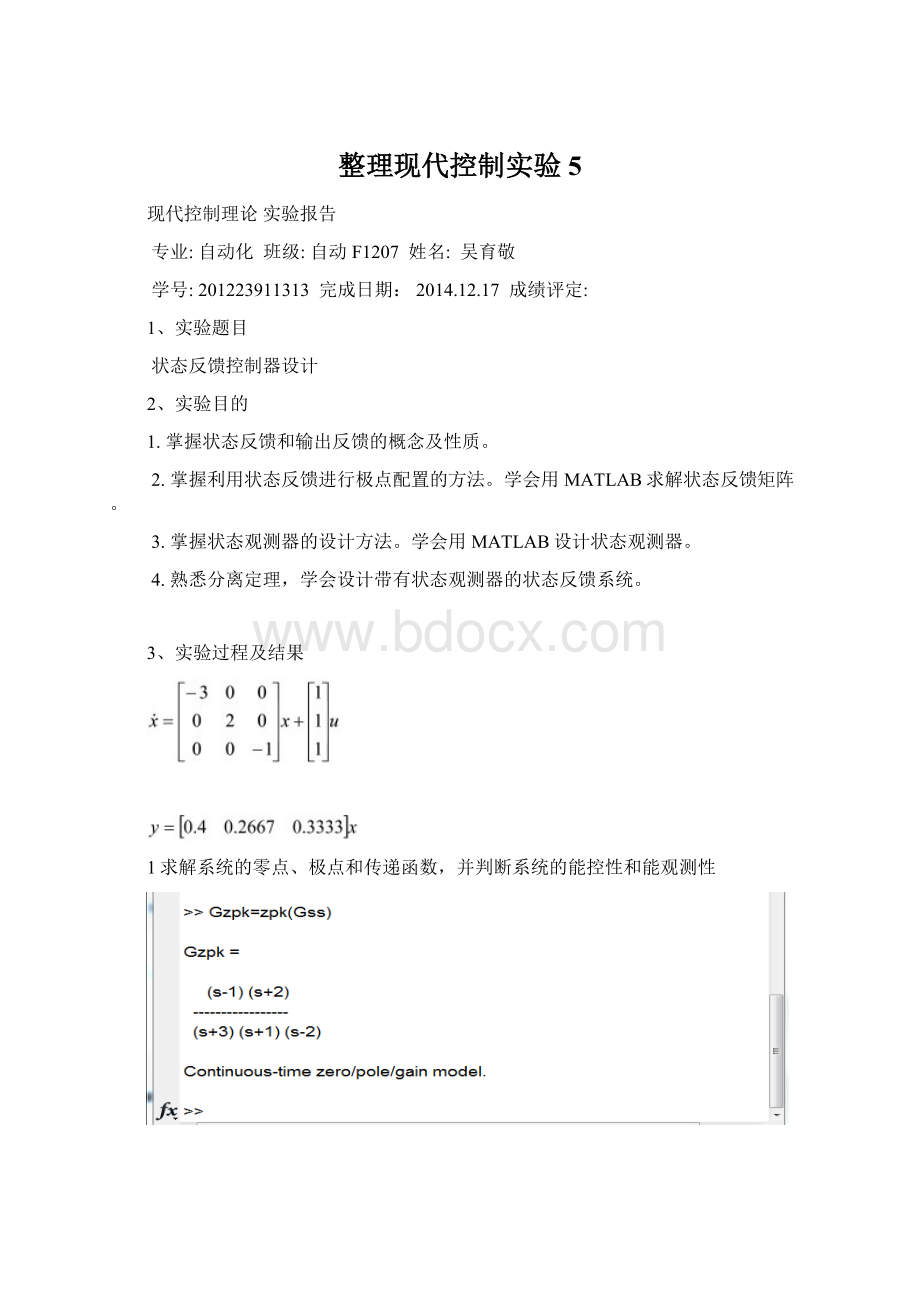
1求解系统的零点、极点和传递函数,并判断系统的能控性和能观测性
所以系统是能控能观
2分别选取K=[030],K=[132],K=[016/3–1/3]为状态反馈矩阵,求解闭环系统的零点、极点和传递函数,判断闭环系统的能控性和能观测性。
它们是否发生改变?
为什么?
K=[030]
其状态空间模型
其零极点模型
其传递函数模型
能控性
能观性
引入状态反馈后系统能观性能控性没变能观性也没变
K=[132]
状态空间模型
ZPK模型
能控性
K=[016/3–1/3]
状态空间模型
Zpk模型
传递函数模型
任选三个输出反馈矩阵,求解闭环系统的零点、极点和传递函数,并判断系统的能控性和能观测性。
它们是否发生改变?
为什么?
选择G=【123】
状态空间模型
ZPK模型
Tf模型
能控能观
2.
求解系统的极点。
绘制系统的单位阶跃响应曲线,并确定系统的超调量和上升时间。
建立状态空间
建立ZPK模型
建立TF模型
单位阶跃响应曲线
求解状态反馈矩阵K,使闭环系统的极点为和。
求解状态反馈系统的传递函数。
绘制该闭环系统的单位阶跃响应曲线,并确定系统的超调量和上升时间。
与原系统比较,性能是否改善?
[例题-2006年真题]下列关于建设项目环境影响评价实行分类管理的表述,正确的是( )阶跃响应曲线
设计一个全维观测器,使观测器的极点为-5,-5,-5。
仿真状态观测器观测到的状态
3.划分评价单元
A.环境影响报告表
1.依法评价原则;
(5)建设项目对环境影响的经济损益分析。
(1)报送审批综合性规划草案和专项规划中的指导性规划草案时,将环境影响篇章或者说明一并报送。
(6)列出选定的评价方法,并作简单介绍。
目前,获得人们的偏好、支付意愿或接受赔偿的意愿的途径主要有以下三类:
①从直接受到影响的物品的相关市场信息中获得;②从其他事物中所蕴含的有关信息间接获得;③通过直接调查个人的支付意愿或接受赔偿的意愿获得。
1)直接使用价值。
直接使用价值(DUV)是由环境资源对目前的生产或消费的直接贡献来决定的。
(二)规划环境影响评价的技术依据和基本内容
 升级会员
升级会员 