包装自动线控制课程设计说明书.docx
《包装自动线控制课程设计说明书.docx》由会员分享,可在线阅读,更多相关《包装自动线控制课程设计说明书.docx(17页珍藏版)》请在冰豆网上搜索。
包装自动线控制课程设计说明书
包装自动线控制
1、课题说明
1.1课题简介
1.1.1包装自动线结构
包装自动线是依据包装工作过程要求而设计制造的一种高效率自动化设备,具有计数,移动功能。
题中包装生产线由输送待包装产品的输送带,产品计数装置,产品分离与推送装置组成。
包装自动生产线的输送带采用电动机驱动,分离产品的挡板机构和退出产品的推送机构采用气动系统驱动,由电气控制系统实现工作自动循环的控制,是典型的机电或机液〔气〕一体化的自动化工作设备。
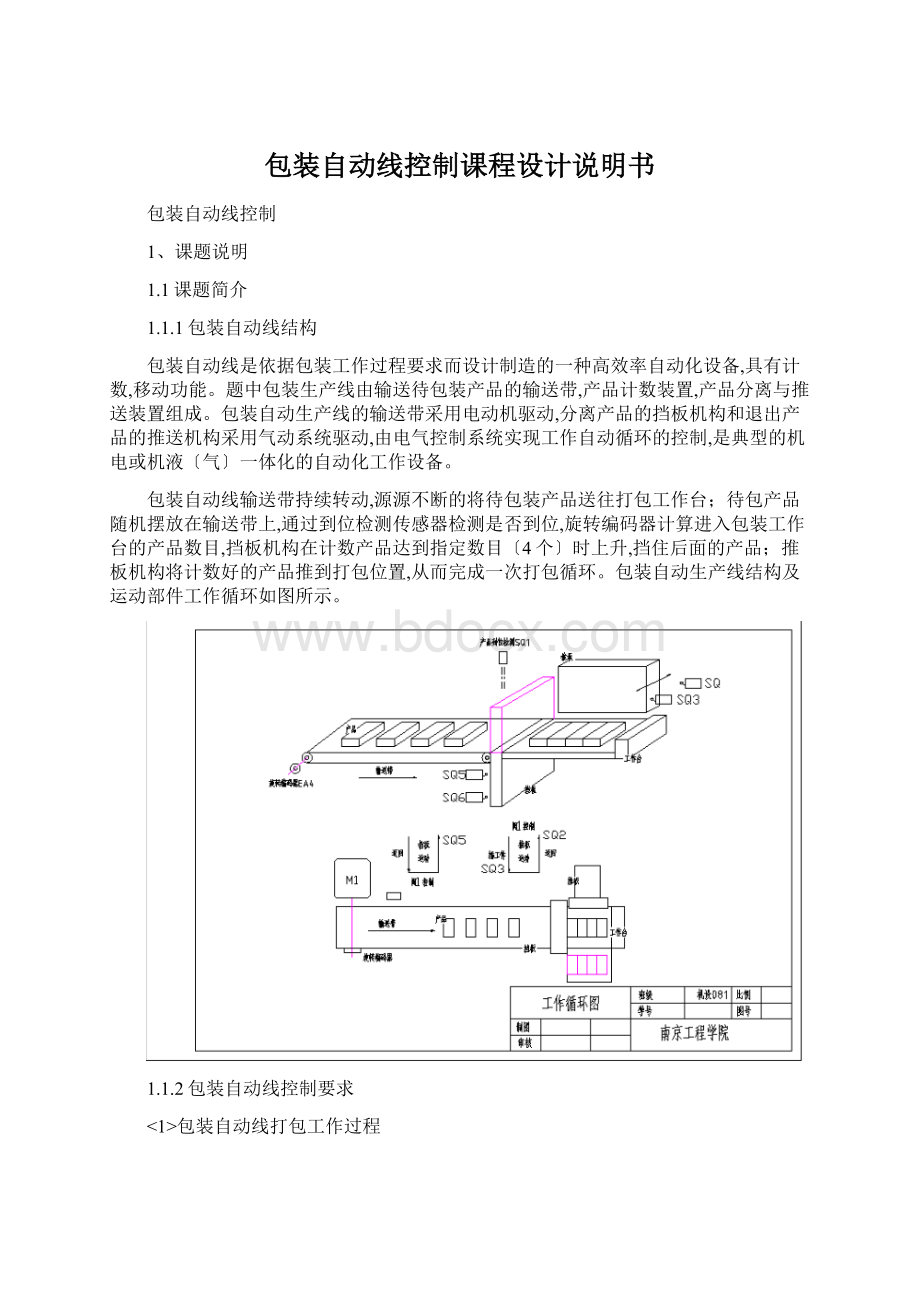
包装自动线输送带持续转动,源源不断的将待包装产品送往打包工作台;待包产品随机摆放在输送带上,通过到位检测传感器检测是否到位,旋转编码器计算进入包装工作台的产品数目,挡板机构在计数产品达到指定数目〔4个〕时上升,挡住后面的产品;推板机构将计数好的产品推到打包位置,从而完成一次打包循环。
包装自动生产线结构及运动部件工作循环如图所示。
1.1.2包装自动线控制要求
<1>包装自动线打包工作过程
包装自动线打包工作时,由于人工不断将待包装产品放置在输送带上,包装自动完成计数,分离和送出,其工作过程如图所示。
(1)包装自动线的控制要求
包装自动线的控制要求,是必须能满足自动线所有的工作要求。
包装自动线的工作要求包含三个方面,工作方式要求,工作过程要求,安全稳定要求。
〔2〕包装自动线工作方式要求
为保证包装自动线能够处于正常工作,要求具备二种工作方式;
输送带能够点动向前调整;挡板,推板能够分别调整;
整机全自动工作循环
〔3〕包装自动线工作过程要求
包装自动线工作过程是自动线在正常包装时整机全自动循环的工作过程,其过程需要满足如下工作要求:
按下启动按钮,输送带启动,输送带包装产品;
挡板与推板在原位,待包装产品到达检测位置,检测传感器信号出发计数;
到达计给定数值后,挡板上升2秒后,推板前移推出工件;
推板退回,到达原位后,挡板下降;
按下停止按钮,生产系统停止。
〔4〕包装自动线控制系统元件配置与工作要求
包装自动线输送带电机为2.2KW,挡板机构与推板机构由气压系统驱动,供气站气泵电动机为2KW,挡板和推板动作方向通过电磁阀控制。
自动循环工作时,所有工步切换由行程开关控制。
电器元件工作关系如表所示
电器元件工作关系表
〔5〕包装自动线安全稳定工作要求
具有运动部件间安全工作的联锁功能;
具有位置保护功能〔如限位,越位,相对位置保护〕
电气控制系统具有短路,电动机过载等保护功能;
具有应急操作功能
具有照明,指示灯辅助功能。
1.2课程设计的目的
《机电传动控制》课程设计为该课程的实践环节,在本课程设计的过程中,通过课程设计实践环节巩固和加强<机电传动控制>课程所学习的知识,掌握课程知识实际应用的能力。
使学生能够运用机电传动控制的原理和分析问题,解决问题的方法,并能综合已学知识,进行简单控制系统设计,PLC控制程序设计,增强编程软件使用的能力。
2、课题任务分析
2.1设备机构组成分析:
依据包装自动线控制系统设计任务书分析可知:
包装自动生产线由输送待包装产品的输送带,产品计数装置,产品分离与推送装置组成。
包装自动生产线的输送带采用电动机驱动,分离产品的挡板机构和退出产品的推送机构采用气动系统驱动,由电气控制系统实现工作自动循环的控制。
设备工作过程分析:
包装自动线输送带持续转动,源源不断的将待包装产品送往打包工作台;待包产品随机摆放在输送带上,通过到位检测传感器检测是否到位,旋转编码器计算进入包装工作台的产品数目,挡板机构在计数产品达到指定数目〔4个〕时上升,挡住后面的产品;推板机构将计数好的产品推到打包位置,从而完成一次打包循环。
3、控制方案设计
3.1任务分析
3.1.1控制要求分析
(1)包装自动线能够处于正常工作,要求具备二种工作方式,即:
输送带能够点动向前调整;挡板,推板能够分别调整
整机全自动工作循环
(2)包装自动线工作过程是自动线在正常包装时整机全自动循环的工作过程,其过程需要满足的工作要求有:
按下启动按钮,输送带启动,输送带包装产品;
挡板与推板在原位,待包装产品到达检测位置,检测传感器信号出发计数;
到达计给定数值后,挡板上升2秒后,推板前移推出工件;
推板退回,到达原位后,挡板下降;
按下停止按钮,生产系统停止。
3.1.2控制方案
由设备条件和控制要求分析结果可以确定控制方案如下:
(1)输送带电机启动和气泵启动采用开关量控制
〔2〕基于设备自动工作的要求,选择PLC为主要控制器件构成控制系统由于控制对象为单机设备,控制系统属于小型系统,因此选用三菱公司型号为FX2N的PLC产品;
由于工作要求确定,控制系统可运行在2种模式下,即全自动工作循环和手动调整工作;
(1)2台电动机均为直接启动控制,单方向转动。
电动机无制动控制;
(2)电动机驱动电路三相电源供电,线电压380V
〔3〕PLC主机工作电源为交流电源,电压220v,交流接触器线圈使用交流电源,电压为220v;电磁阀的电磁铁使用24v直流电源,主令控制电器及行程开关等使用24v直流电源。
(4)控制系统具有短路和过载保护功能;
〔5〕使用信号灯显示机床工作状态。
3.2设计主电路
包装自动线电气控制主要由两部分组成,即电动机驱动系统〔主电路〕和由PLC设备构成的控制部分,系统电路图如图所示。
3.2.1主电路图
3.2.2电器元件明细表
符号
名称及用途
符号
名称及用途
M1
输送带电动机
SB1
总停按钮
M2
气泵电动机
SB2
启动按钮
KM1
输送带接触器
SB3
输送带点动按钮
KM2
气压系统接触器
SB4
挡板上升点动
KM3
检测器接触器
SB5
推板前移点动
KM4
挡板上升自锁接触器
SB6
推板后移点动
KM5
推板后移自锁接触器
SB7
挡板下移点动
KM6
挡板下降自锁接触器
SB8
停止自动循环按钮
KM7
推板前移自锁接触器
SB9
恢复自动循环按钮
QF
PLC电源开关
SA1
自动/手动选择开关
QS
电源隔离开关
SQ1
产品到位检测
FU1、FU2、FU3
FU4、FU5、FU6
短路保护熔断器
SQ2、SQ3
推板前、后移极位开关
SQ5、SQ6
挡板上升、下降极位开关
HL1
气压系统指示灯
FR1、FR2
电机过载保护热继电器
HL2
输送带电机指示灯
YV1、YV2、
挡板移动电磁阀电磁铁
HL3
自动运行指示灯
YV3、YV4
推板移动电磁阀电磁铁
VC
整流器
HL4
手动指示灯
TC
变压器
PLC选型设计
本系统选用三菱公司型号为FX2N的PLC产品。
3.2.3I/O分配表
电器元件信号与plc连接的通道分配表
输入
输出
元件
通道地址
说明
元件
通道地址
说明
SB1
X001
总停按钮
HL1
Y002
气压系统指示器
SB2
X002
启动按钮
HL2
Y004
输送带电机指示灯
SB3
X003
输送带点动按钮
HL3
Y005
自动运行指示灯
SB4
X004
挡板上升点动
HL4
Y006
手动指示灯
SB5
X005
推板前移点动
YV1
Y007
控制挡板上升电磁铁
SB6
X006
推板后移点动
YV2
Y011
控制挡板下降电磁铁
SB7
X007
挡板下移点动
YV3
Y010
控制推板前移电磁铁
SB8
X100
停止自动循环按钮
YV4
Y011
控制推板后移电磁铁
SB9
X101
恢复自动循环按钮
KM1
Y003
输送带接触器
SA1
X010
自动/手动选择开关
KM2
Y001
气压系统接触器
SQ1
X020
产品到位检测
KM3
Y013
检测器接触器
SQ2
X021
推板后移极位开关
KM4
Y012
挡板上升自锁接触器
SQ3
X022
推板前移极位开关
KM5
Y014
推板后移自锁接触器
SQ5
X023
挡板上升极位开关
KM6
Y015
挡板下降自锁接触器
SQ6
X024
挡板下降极位开关
KM7
Y016
推板前移自锁接触器
3.2.4I/O端子接线图
4、控制流程分析
4.1流程图
由于控制系选择三菱系列PLC,该产品具有顺序控制的特殊用法,即步进控制。
步进控制采用状态转换的方式简化控制条件,使得控制程序设计简洁方便,包装自动控系统工作过程为典型顺序控制,因此采用步进控制,其控制流程设计采用与控制流程图功能一致的状态转移图描述。
流程图如下所示:
4.2梯形图
根据上述过程的分析设计,编写梯形图如图:
4.3指令表
由梯形图得指令表如下图:
5、设计小结
机电传动控制被普遍应用于现代化的各种机械,学习机电传动控制有着十分重要的现实意义。
作为学习机械设计的大学生,了解并学习机电传动控制以及PLC是非常必须的。
而机电传动控制课程设计无疑是进一步巩固我们所学机电传动控制知识的非常有效的途径。
通过本次课程设计使我对设计PLC控制电路有了初步的了解,通过自己对课题的分析以及与同学的讨论研究和参考各种相关书籍,使我对PLC控制系统的工作方式和基本组成有了清晰具体的了解。
通过课程设计,理论联系实际,使我对以前课堂所学机电传动控制的有了系统的整理和巩固。
同时,本次课程设计也是一次对我自己设计能力的锻炼和考验,使我受益匪浅。
当然,在设计过程中遇到问题是不可避免的。
我们所设计的课题要求对每一个产品都准确计数,但是现实中可能会出现两个产品连在一起的情况,这样就有可能把两个产品误计成一个,这是不被允许的,所以,我们必须解决这个问题,后查询相关书籍,参考相关的项目我们发现用旋转编码器与产品到位检测组合使用可以解决这个问题。
然后在对编写的梯形图进行调试的时候,自动工步S0与手动工步S30会不断闪烁,但是编写梯形图并转换的时候能正常转换,既没有逻辑问题,我百思不得其解,不知道问题在什么地方。
另外,也不知道该如何编写梯形图,可以使得自动工步与手动工步可以正常选择和切换。
编写完程序,对于如何选择PLC型号又出现了新的问题,通过查询相关书籍并参照类似的系统,最终根据我们的课题系统为小型系统并且需要手动和自动控制等,最终我们选择FX2N型号的PLC。
参考文献
[1]海心、华主编.机电传动控制.高等教育出版.20XX
[2]周军,海心.电器控制及PLC.:
机械工业,2001,6
[3]海心马银忠树青主编.西门子PLC开发入门与典型实例.人民邮电.20XX1月
[4]宋伯生.PLC编程实用指南.:
机械工业,2007,2
[5]志新,宗学军.电器与PLC控制技术.:
大学,中国林业2006,8
[6]付家才,PLC实验与实践.:
高等教育,2006,5
[7]胡健.西门子S7-300PLC应用教程.:
机械工业.2007,3
[8]汪小澄,袁立宏,世荣.可编程序控制器运动控制技术.:
机
械工业,2006,1
[9]洪志育.例说PLC.:
人民邮电,2006,6
 升级会员
升级会员 