工业机器人专业实训室建设方案.docx
《工业机器人专业实训室建设方案.docx》由会员分享,可在线阅读,更多相关《工业机器人专业实训室建设方案.docx(19页珍藏版)》请在冰豆网上搜索。
工业机器人专业实训室建设方案
工业机器人技术专业实训室建设方案
该工业机器人实训体系建设方案是根据目前工业机器人建设的最新要求,吸收国内外同类建设方案优点,充分考虑学校区域工业机器人发展特点和区域人才培养的需求,并结合工业机器人教学的特点精心构建而成。
该建设方案集成多种实验实训系统,提供了众多实验例程与典型应用,便于学生、老师熟悉和掌握工业机器人的实际应用。
为符合学校物工业机人专业的建设目标和要求,实训室方案的丰富建设经验与优势、以及专业的定制化服务能力,根据学校的需求,特此设计提出了一个以院校专业学科建设为宗旨的工业机器人应用实训室综合解决方案,方案包含工业机器人的基础实训室建设和工业机器人典型应用实训室建设。
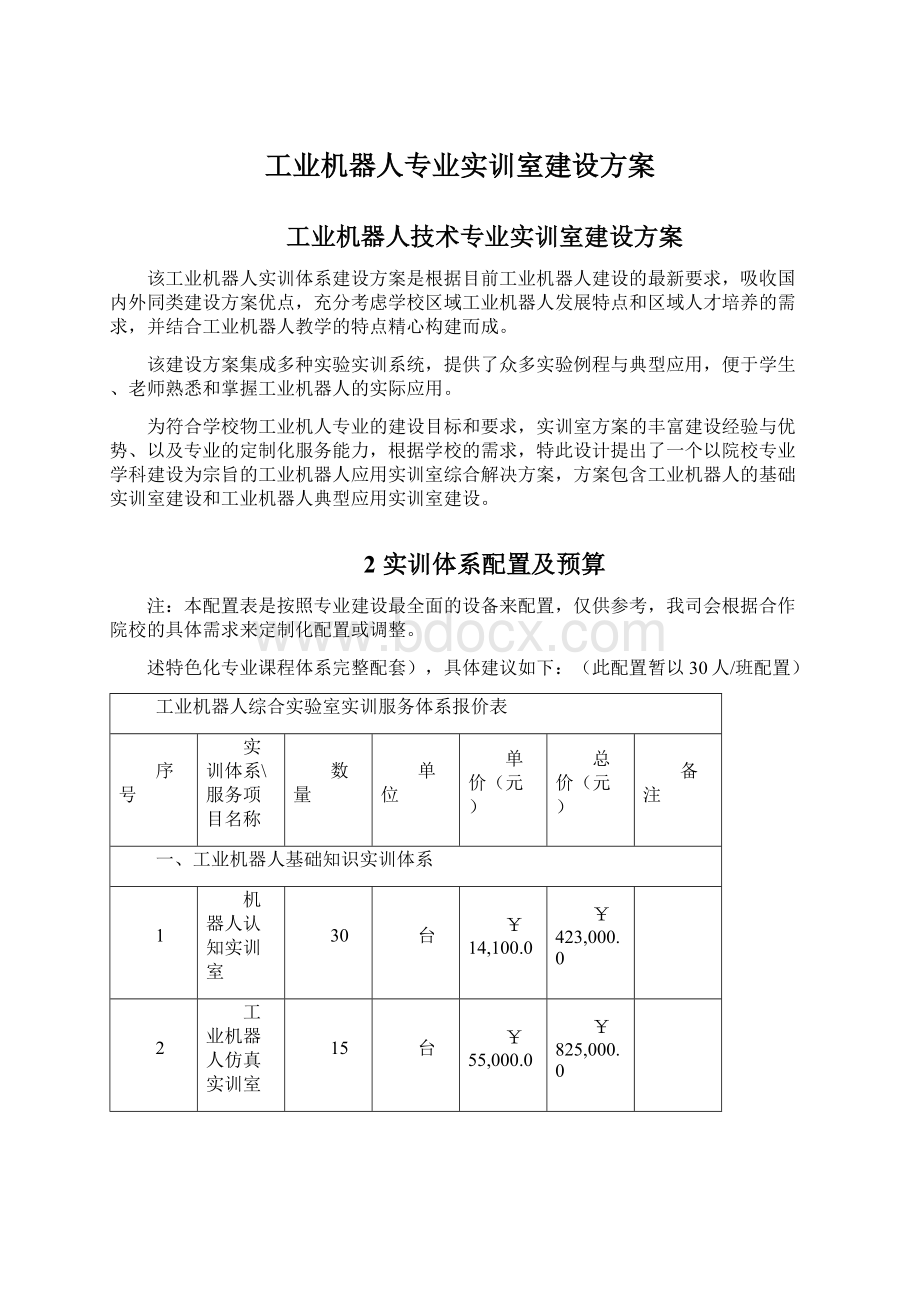
2实训体系配置及预算
注:
本配置表是按照专业建设最全面的设备来配置,仅供参考,我司会根据合作院校的具体需求来定制化配置或调整。
述特色化专业课程体系完整配套),具体建议如下:
(此配置暂以30人/班配置)
工业机器人综合实验室实训服务体系报价表
序号
实训体系\服务项目名称
数量
单位
单价(元)
总价(元)
备注
一、工业机器人基础知识实训体系
1
机器人认知实训室
30
台
¥14,100.0
¥423,000.0
2
工业机器人仿真实训室
15
台
¥55,000.0
¥825,000.0
3
工业机器人编程与调试实训室
5
台
¥275,000.0
¥1,375,000.0
二、工业机器人工程应用技术实训体系
4
工业机器人装配应用工作站
2
台
¥328,000.0
¥656,000.0
5
工业机器人焊接应用工作站
2
台
¥314,000.0
¥628,000.0
6
工业机器人分拣应用工作站
2
台
¥442,000.0
¥884,000.0
7
工业机器人搬运应用工作站
2
台
¥276,000.0
¥552,000.0
8
工业机器人机床上下料工作站
2
台
¥321,000.0
¥642,000.0
合计金额
¥5,985,000.0
注:
本表方案是按照专业建设最全面的设备来配置,仅供参考。
我司会根据具体的需求来定制化配置。
3工业机器人实训室详细设计方案
3.2工业机器人多功能实训室
实训目标
通过多功能实训室建设能够满足工业机器人编程、系统调试、以及机电设备的安装与调试实训教学。
通过实训使学生掌握工业机器人应用的以下技能:
1)熟悉工业机器人应用系统的基本组成;
2)熟练掌握工业机器人编程与调试的能力;
3)熟练掌握工业机器人示教器的使用方法与技巧;
4)熟练掌握工业机器人示教器的编程与示教功能;
5)掌握工业机器人离线编程的基本能力;
6)掌握工业机器人安全使用规范;
7)掌握工业机器人码垛应用的编程与调试方法;
8)掌握工业机器人轨迹规划的编程与调试方法;
9)掌握工业机器人TCP定点的编程与调试方法;
10)掌握工业机器人固定位置排序的的编程与调试方法。
实训项目
1)工业机器人的基本认识实训;
2)ABB机器人控制器结构认识;
3)ABB控制器IO接线实训;
4)FlexPendant主要组成实训;
5)ABB示教器基本操作实训;
6)ABB示教器运动操作实训;
7)ABB机器人的IO通信及应用;
8)ABB机器人的程序数据设置实训;
9)实训外设的安装与调试;
10)机器人基本运动指令实训;
11)平面矩形描图编程与示教实训;
12)平面圆形描图编程与示教实训;
13)固定位置搬运编程与示教;
14)平面矩阵码垛编程与示教;
15)码垛编程与示教。
实训效果
通过系统的实训课程训练,使学生掌握工业机器人应用系统的组成、编程、调试以及机电设备的安装方面的知识与技能。
为后续的机器人的典型应用与综合应用打下坚实的基础。
建议配置
按照工业机器人实训教学的特点,实训室按照理实一体化形式进行建设,实训室内部设实践操作区、工具集中管理区、理论学习讨论区。
便于开展理实一体化教学。
实训室效果图如下。
表1主要设备配置清单
ABB机器人本体
ABBIRB120
12
台
ABB机器人控制器
IRC5紧凑型控制器
12
台
实训台架
一体式/模块化
12
台
机器人夹具
快速换装夹具,顶尖夹头,搬运训练夹头,轨迹规划夹头
12
套
坐标标定模块
12
套
TCP标定模块
12
套
轨迹规划模块
12
套
码垛模块
12
套
气泵
根据集中供气或单独供气进行具体配置
//
台
低压电器
带漏保空气开关,熔断器,三插电源线
12
套
工具柜
铁皮,定制
2
个
PC机
戴尔/联想品牌机
12
台
电脑桌
定制
12
台
桌子
六角桌/长桌
/
/
凳子
小方凳
25
个
实训室文化建设
1
套
注:
(1)为了保证教学效果,建议采用小班化进行教学,保证每两个学生有一个实训工位;
(2)根据学校具体情况与需求,可对实训室配置进行增减。
3.2.1工业机器人多功能实训台
(1)产品介绍
工业机器人多功能教学工作站具有结构紧凑,训练多种机器人应用功能的特点。
主要包括:
ABB机器人IRB120,操作面板模块,码垛模块,几何轨迹规划模块,TCP标定模块,TCP工件标定模块,物料排序模块等。
并且在该实训模块的基础上,可以拓展PLC控制模块、送料模块、传送带模块、物料检测模块等。
通过该工作站能够学习机器人的基本操作(机器人编程、TCP标定、示教轨迹编程、机器人IO信号控制等),机器人码垛,分拣排序以及学习PLC、气动元件、传感器、电动传送带等常用机电一体化基础知识和设备的应用。
系统说明:
1)实训装置为模块化开放式设计结构,不仅可作为独立的系统单独使用,也可以作为子系统与其它类似设备组合,构成自动化生产线系统,具有功能的可扩展性等优点;
2)各种气动元件、电气元件以及机械运动执行机构的工作过程及运行状态具有直观性;
3)实训装置具有手动和自动控制功能,通过手动可以检测气缸、气爪等主要器件工作性能是否正常进行检测;
4)五个模块由易到难,循序渐进,使学习者迅速的掌握ABB机器人基本操作及使用技巧。
设备3D效果图
(2)系统组成
表1系统配置清单
序号
设备名称
品牌型号
数量
单位
工业机器人
IRB120-3/0.58
1
台
机器人控制器控制器
ABBIRC5紧凑型控制器
1
台
机器人本体到控制器之间的电缆长度7米
ABB
1
块
示教盘附带10米电缆,具中文操作界面
ABB
1
个
DeviceNet总线
ABB
1
根
数字式直流24V16进/16出,输入、输出信号板
ABB(附10米的电缆)
1
个
机器人基本控制软件,5.0版操作系统
ABB
1
套
机器人资料(DVD版)
ABB
1
套
机器人夹具(含顶针夹头、搬运训练夹头、写字训练夹头)
定制
1
套
机器人底座
定制
1
块
机器人实训工作台
L*W*H=1500mm*1200mm*1400mm(含机器人高度)
1
台
TCP标定模块
定制
1
套
TCP多形状工件标定模块
定制
1
套
轨迹规划模块
定制
1
套
码垛搬运模块
定制
1
套
工件分拣排序模块
定制
1
套
配套资源
教学视频、实训指导书、教学PPT、教学教案
1
套
(3)主要技术参数
机器人本体
Ø型号IRB120-3/0.6
Ø工业机器人工作半径:
580mm
Ø有效载荷:
3kg
Ø位置重复精度:
0.1mm
Ø轴数:
6
Ø机械手重量:
25Kg
Ø机器人底座尺寸:
180×180mm
Ø机器人高度:
700mm
Ø电源电压200-600V50/60Hz
Ø变压器额定功率:
3.0kVA
机器人的无限制工作范围
位置
手腕中心处
角度
X
Z
轴2
轴3
A
302mm
630mm
0°
0°
B
0mm
870mm
0°
-77°
C
169mm
300mm
0°
+70°
D
580mm
270mm
+90°
-77°
E
545mm
91mm
+110°
-77°
F
-440mm
-50mm
-110°
-110°
G
-67mm
445mm
-110°
+70°
H
-580mm
270mm
-90°
-77°
J
-545mm
91mm
-110°
-77°
机器人转到半径图
机器人型号
位置A
位置B
位置C
IRB120-3/0.6
R121
R580
R169.4
控制器参数
Ø
型号:
IRC5C紧凑型控制器
Ø控制柜尺寸:
258×450×565mm(H×W×D)
Ø控制柜重量:
27.5kg
Ø电气连接:
单相220/230V,50-60Hz
Ø防护等级:
IP20
Ø环境温度:
0-45℃
Ø相对湿度:
最高95%
实训台架
Ø材质:
铝合金型材
Ø尺寸:
L*W*H=1500mm*1200mm*1400mm(含机器人高度)
Ø重量:
100kg
实训台3D效果图
3.4工业机器人仿真实训室
实训目标
通过仿真实训室建设主要目标是在有硬件实训室的基础上,通过虚拟仿真技术对硬件实训设备不足的一个补充;另一方面通过虚拟仿真技术,解决机器人教学难点、学生入门学习难的问题。
虚拟仿真实训室能够满足工业机器人编程、系统建模、机器人组成、机器人拆装、机器人维护的理论知识的实际操作。
通过虚拟仿真实训使学生掌握工业机器人的以下知识与技能:
1)掌握工业机器人系统组成;
2)掌握工业机器人拆装步骤;
3)掌握工业机器人工作站系统组成;
4)掌握工业机器人基本编程方法;
5)掌握工业机器人系统建模的基本方法;
6)掌握工业机器人示教编程的基本操作与方法;
7)掌握工业机器人日常维修项目。
实训项目
工业机器人仿真实训室能够开展以下实训项目:
1)工业机器人认识实训;
2)工业机器人系统组成认识实训;
3)工业机器人本体拆装操作实训;
4)工业机器人调试的基本方法实训;
5)工业机器人离线编程实训;
6)工业机器人建模实训;
7)工业机器人示教器操作实训;
8)工业机器人IO配置实训;
9)工业机器人日常维护实训;
10)工业机器人故障排除实训。
实训效果
通过虚拟仿真实训体系的训练,使学生能够掌握机器人系统的基本组成,机器人的基本操作,机器人本体拆装、机器人日常维护保养、机器人编程调试以及机器人系统建模的基本知识与技能。
培养学生机器人安全操作的基本规范和技能,为真实的设备操作打下基础,减低学习难度,提高教学效果,保障学生人身和设备安全。
建议配置
表1仿真实训室配置清单
序号
设备名称
品牌型号
数量
单位
机器人应用仿真系统
HX-FZ-RB01
50
套
RobotStudio
ABB
50
套
资料柜
铁皮,定制
2
个
PC机
戴尔/联想品牌机
50
台
电脑桌
定制
50
台
凳子
小方凳
50
个
教学资源
教学视频、实训指导书、PPT、教案
1
套
实训室文化建设
1
套
3.4.1工业机器人系统仿真工作站
(1)产品介绍
本系统由深圳市华兴鼎盛科技有限公司根据keba机器人控制系统专门为中、高等职业院校机器人教学而设计,该系统实现了真实的示教器与虚拟仿真系统的完美结合。
适合中高等职业院校的机器人编程、操作与系统仿真理实一体化教学。
能够解决机器人的现场编程、机器人操作和系统仿真的实训与理论学习。
工业机器人系统仿真由机器人控制器、示教器以及PC端仿真软件组成。
仿真系统实物图(以具体实物为准)
(2)系统组成
工业机器人仿真实训系统保护工业机器人控制器、操作系统、虚拟仿真软件、电源保护、示教器、总线通讯模块、钢制控制箱等组成。
是真实工业机器人控制系统完整的一部分,控制系统具有模块化拓展功能,可根据需要进行设备的拓展。
序号
设备名称
品牌型号
数量
单位
工业机器人仿真控制器
FZ-RB01
1
台
工业机器示教器
T55
1
台
CF卡(256M)
1
块
3D仿真系统软件
1
套
电气控制柜
定制
1
根
PC电脑
戴尔/联想
1
台
教学资源
教学视频、实训指导书、教学PPT、教案
1
套
(3)主要技术参数
控制柜参数
Ø尺寸:
L*W*H=300*200*400mm
Ø材质:
铁质控制柜,厚度≥1.0mm
Ø电气参数:
AC220V1.0A
Ø电源保护:
漏电保护、短路保护
Ø电源指示灯(HL1)、系统运行指示灯(HL2)
Ø系统电源开关(QS)
控制器参数
Ø控制器规格
⏹CPUIntelATOMZ5101.1GHz1MB缓存
⏹内存:
512MB
Ø电气参数
⏹DC24V5.5A
⏹最大功耗:
75W
Ø物理尺寸
⏹尺寸:
(宽x高x深:
135毫米x120毫米x100毫米
⏹重量:
大约910克
Ø通讯接口:
⏹CF:
×1
⏹以太网:
10/100/1000Mbit/s局域网×1
⏹USB2.0(高速)×2
⏹CAN总线×1
⏹EtherCAT×1
⏹DVI×1
⏹扩展插槽×1
⏹图形控制器:
英特尔GMA500
⏹DVI-D接口×1
示教器参数
Ø硬件参数
⏹CPU:
OMAP3530频率600MHz
⏹内存标准:
LPDDRAM:
64MB,FLASH:
64MB,
⏹6.5寸TFT-LCD(薄膜场效应管LCD)65535色彩纯度,LED背光,640X480分辨率
⏹触摸屏电阻屏
⏹按键:
薄膜接触式按钮最多64个按键4个状态显示LED灯
Ø电气参数
⏹DC24V(电压容限:
19.2V-30V符合EN61131-2标准)
⏹供电电压最大中断时间:
≤10ms(符合EN61131-2标准)
⏹冲击电流:
最大5.6A
⏹功率8.6W
Ø接口参数
⏹串口1个
⏹类型:
RS-422-ARS-232-C数据传输率115kBits/s
⏹以太网口1个数据传输率100MBits/s
⏹USB口USB2.0,高速
虚拟软件
Ø软件具备三维建模、系统编程、使用手持器进行系统编程和示教操作;
Ø支持所有IEC61131-3编程语言(IL,ST,LD,FBD,SFC)
Ø软件具备其他机器人三维模型导入功能,支持多品牌机器人本体仿真;
Ø具有机器人本体控制权限切换功能,实现机器人本体控制在示教器和PC端虚拟示教器的切换;
Ø示教器和PC虚拟端示教器具备机器人控制程序的编写、修改等编辑功能;
Ø示教器和PC端虚拟示教器具备手动模式和自动控制模式的切换;
Ø具有示教器对机器人动作示教功能。
Ø对任何数量的YT,XY曲线用于详细诊断
ØYT图表可用于分析快速变化的变量。
一个典型的应用是确定运动的最大加速度。
这是一个快速简便的方法确定动作行程是否会导致驱动器颤动。
例如,XY图表可用于显示简单的二维图形的运动形式。
Ø可通过设定每一个机器人可达位置姿态的轴坐标位置和世界坐标位置进行运动轨迹设定,也可通过算法验证。
Ø机器人的动作可以在使用机器实际操作之前,通过集成的三维查看器进行模拟。
仿真结果能够反映工作空间违规的情况,可提前排除损坏机械的风险,
Ø大图片总览式中央项目管理
Ø该软件是真实的机器人系统开发软件,具备整个自动化项目的中央管理(配置,PLC的应用,机器人应用,可视化应用),使得易于把工程集成到项目版本管理或将其复制到另一个文件的位置。
Ø简单的CPU、IO、驱动模块配置
Ø能够对系统中所有硬件组件进行中央配置,避免误差重复出现。
Ø数字和模拟IO模块的结构化诊断
Ø集成的IO监控功能,即使一个应用程序的功能没有完全实现,也可已通过强制IO来检查线路。
同样,即使没有硬件也可以对应用程序进行测试。
Ø可用于快速系统诊断的综合报告监控器
Ø该报告监控器可用于查看控制器的待决信息(错误,警告,提示信息)。
这些信息的历史记录能够进行显示。
3.4.2RobotStudio仿真软件
仿真实训室采用理实一体化形式进行建设,标准配置为不超过25台PC机,安装ABB公司RobotStudio软件以及相关工具软件,实训室配置多媒体设备,便于演示操作。
配置讨论区和上机演示区,可方便实施理实一体化教学。
实训室配备实训室管理软件,可方便教师机监控、演示、传送文件。
(1)实训目的
◆掌握RobotStudio软件界面操作
◆掌握工业机器人工作站的布局
◆掌握工业机器人系统的搭建与手动操作
◆掌握工业机器人和工件坐标与轨迹程序的编写
◆掌握RobotStudio中的建模功能
◆掌握机器人的立项轨迹编程
◆掌握Smart组件的应用
◆掌握带导轨和变位机的机器人系统创建与应用
◆掌握RobotStudio的在线功能
通过使用RobotStudio软件对实训项目的操作练习,学习工业机器人应用的相关理论知识,训练学生对工业机器人系统搭建、程序的编写、安全操作规程等技术和技能。
通过一系列系统的实训项目的训练,培养学生的工程思维能力、团队协作能力、系统规划的能力,使学生真正能够掌握ABB工业机器人的系统搭建、安装与调试、和编程的基本操作知识与技能。
图5RobotStudio初始界面图6RobotStudio工程界面
图7机器人焊接仿真实训
图8机器人搬运仿真实训
图9机器人码垛仿真实训
(2)实训项目
◆项目一认识、安装工业机器人仿真软件
◆项目二构建基本工业机器人工作站
◆项目三RobotStudio中的建模功能
◆项目四机器人离线轨迹编程
◆项目五Smart组件的应用
◆项目六带导轨和变位机的机器人系统创建与应用
◆项目七ScreenMaker示教器用户自定义界面
◆项目八RobotStudio的在线功能
(3)实训配置
表1配置一览表
序号
设备名称
备注
RobotStudio软件
PC机
电脑桌
凳子
文件柜
多媒体设备
实训室管理软件
教学资源
文化墙
备注:
1、此方案为工业机器人仿真实训室初步方案,具体可按照学校预算和需求做具体设备配置及型号的调整。
2、实训室中配套的仿真软件、PC机等设施将根据学校提供的具体场地的要求再做具体安排。
(4)课程资源
华兴鼎盛针对职业教育的特点,集合本公司具有职业教育经验的技术人员,专门为职业教育机器人教学开发了一套集合仿真软件、教材、课程资源、教学项目等等。
表2课程资源一览表
序号
资源名称
类别
备注
教学课件
PPT
教学设计
Word
仿真案例
微课视频
AVI/RMVB/MP4
应用教学视频
AVI/RMVB/MP4
学生任务书
Word
习题
Word
综合练习题
Word
教学案例
Word
实训指导手册
PDF
配套数据手册
PDF
工业机器人图片图
JPEG/PNG
3.4.3工业机器人应用仿真软件
(1)产品介绍
本系统是由华兴鼎盛科技有限公司专门为职业教育针对工业机器人教学而开发的,本系统采用3D虚拟仿真技术实现真实的机器人结构展示、机器人本体与控制系统的拆装、机器人编程操作、机器人系统维护等实训项目。
对真实的实训实训设备操作实训进行一个补充,减低学生学习难度,提高教学效率,解决真实设备无法实现的实训项目,如机器人拆装,维护与保养等。
虚拟仿真软件界面
(2)系统组成
序号
设备名称
品牌型号
数量
单位
工业机器人应用仿真软件
HX-FZ-RB02
1
套
PC机
戴尔/联想
1
台
课程资源
教学视频、实训指导书、教学PPT、教学教案
1
套
(3)主要技术参数
仿真软件功能
Ø具备工业机器人结构展示
Ø具备工业机器人结构拆装展示
Ø具备工业机器人拆装操作
Ø具备工业机器人示教器控制机械本体操作
Ø具备在线测知识与技能评功能
硬件环境
服务端:
硬件名称
基本配置要求
处理器CPU
Intel(R)Xeon(R)E5-2630
磁盘
200GB以上
内存
8GB
显示适配器(显卡)
标准
显示器
无要求
客户端:
硬件名称
配置要求
处理器CPU
PentiumDual-CoreE5300以上
磁盘
200GB以上
内存
4GB
显示适配器(显卡)
独立显卡:
256M及以上
显示器
无要求
软件环境
软件架构:
C/S架构,采用服务器部署
服务器:
操作系统:
Win2003/2008,推荐使用win2003
必备安装软件:
MicrosoftSQLServer2005企业版、.NETFramwork4.0,IIS5.5及以上。
客户端:
操作系统——WinXP/Win7;浏览器——IE8及以上;
(4)产品介绍
本系统是由华兴鼎盛科技有限公司专门为职业教育针对工业机器人教学而开发的,本系统采用3D虚拟仿真技术实现真实的机器人结构展示、机器人本体与控制系统的拆装、机器人编程操作、机器人系统维护等实训项目。
对真实的实训实训设备操作实训进行一个补充,减低学生学习难度,提高教学效率,解决真实设备无法实现的实训项目,如机器人拆装,维护与保养等。
虚拟仿真软件界面
工业机器人结构展示
工业机器人本体爆炸图
 升级会员
升级会员 