三维扫描仪使用说明书.docx
《三维扫描仪使用说明书.docx》由会员分享,可在线阅读,更多相关《三维扫描仪使用说明书.docx(23页珍藏版)》请在冰豆网上搜索。
三维扫描仪使用说明书
三维扫描仪操作指导书
工程训练中心
工程综合训练部
前言
近年来,随着制造技术的飞速开展,一种新的制造概念改变了以前传统制造业的工艺过程。
这种新的制造思路是:
首先对现有的产品模型进展实测,获得物体的三维轮廓数据信息,再进展数据重构,建立其CAD数据模型。
设计人员可在CAD模型上再进展改良和创新设计,最后获得的数据可直接输入到快速成型系统或者形成加工代码输入到数控加工中心,生成新的产品或其模具,最后通过实验验证,产品定型后再投入批量生产。
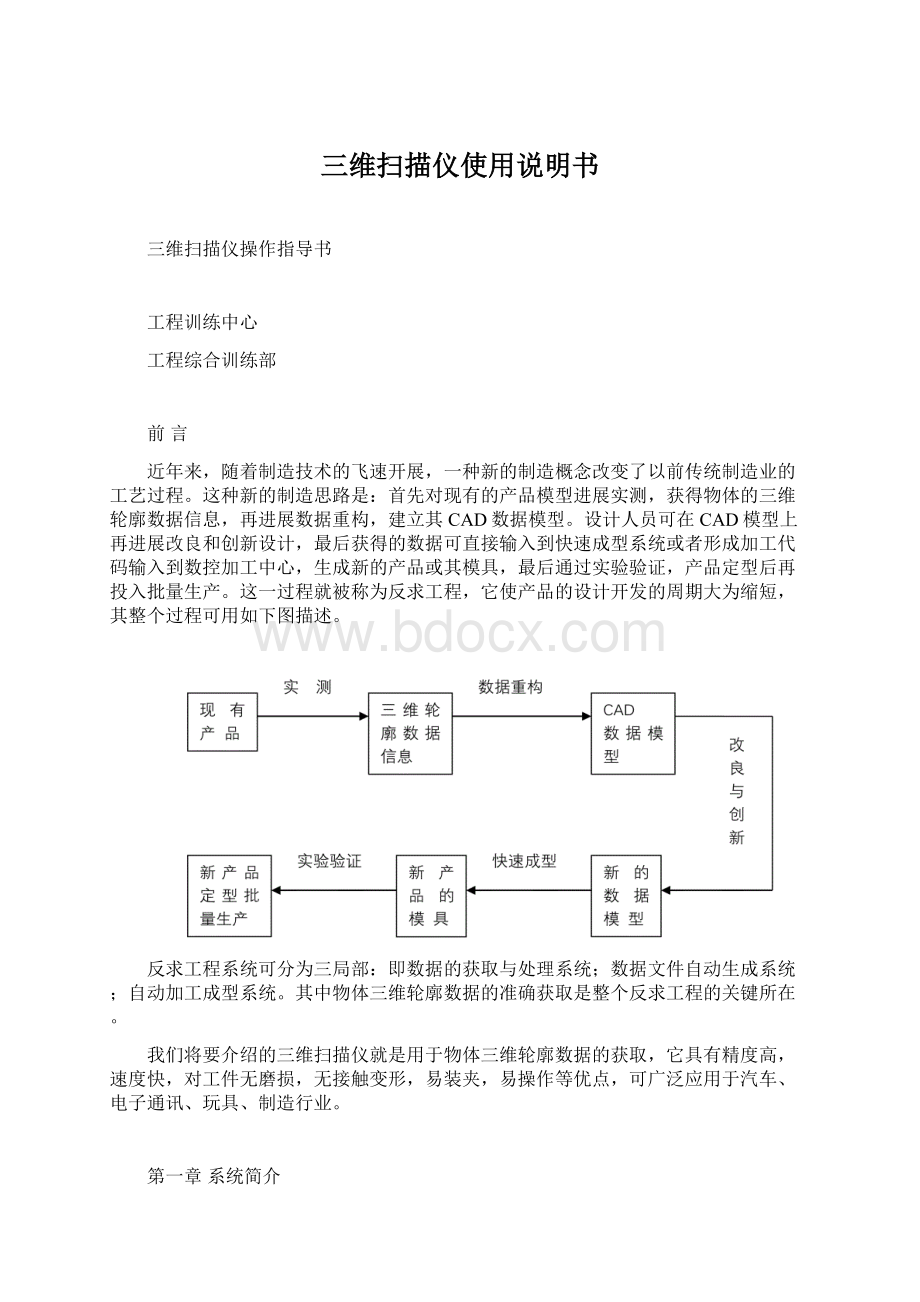
这一过程就被称为反求工程,它使产品的设计开发的周期大为缩短,其整个过程可用如下图描述。
反求工程系统可分为三局部:
即数据的获取与处理系统;数据文件自动生成系统;自动加工成型系统。
其中物体三维轮廓数据的准确获取是整个反求工程的关键所在。
我们将要介绍的三维扫描仪就是用于物体三维轮廓数据的获取,它具有精度高,速度快,对工件无磨损,无接触变形,易装夹,易操作等优点,可广泛应用于汽车、电子通讯、玩具、制造行业。
第一章系统简介
XHA3D三维扫描系统特点
XHA3D三维扫描系统采用世界领先的光栅式照相技术,在短时间获取物体外表三维数据,广泛应用于模具设计、逆向工程、质量检测和控制、医学测量等领域,
产品主要具有以下特点:
扫描速度与精度的完美结合
单面扫描时间少于10秒;采用全自动拼接技术,拼接精度可达0.04mm/m。
非接触式扫描
采用非接触光栅式照相扫描技术,防止了因扫描头磨损而影响精度,具有很高的稳定性。
适用于橡胶类、皮革类等外表易变形物体扫描。
操作简便
操作界面简洁明了,初学者易上手,短时间可熟练操作。
采用安全的结构光光源
ZRET系列三维扫描仪采用安全的结构光光源,对人体无伤害,对环境要求不敏感,不需要在暗室中操作。
全自动拼接
运用标志点拼接技术,扫描过程中不用人为干预,对大型物体屡次拍摄,对复杂物体多角度扫描,可得到完整、准确的三维点云数据。
精细拼接
采用独特的ICP(IterativeClosestPoint)技术,将扫描所得数据的公共局部中所有点进展最优匹配运算,该算法拼合精度高、运算速度快,使工件的整体误差控制在一定围,解决了拼接过程中可能会出现的分层问题。
数据兼容性强
扫描数据可输出成.asc、.ply、等格式,能够直接用于ImageWare、UG、Pro/E、Geomagic、3DMAX等软件。
产品型号、性能指标
产品成套供给清单
序号
名称
单位
数量
001
工业级传感器
个
贰
002
镜头
个
贰
003
光栅发生器
套
壹
004
三角架
个
壹
005
数据线、电源线、控制线
套
壹
006
XHA3D三维数据处理系统软件
套
壹
007
说明书、培训资料与相关后处理资料
套
壹
008
标志点
套
壹
二.安全警告
1.严禁擅自拆开机箱,防止触电或损坏设备。
2.严禁擅自拆开工业传感器与镜头,防止元件损坏。
3.严禁带电插拔插头。
三.使用须知事项
1.请将屏幕分辨率调整为1024*768或800*600〔调为正确屏幕分辨率后光删发生器才能正常使用〕
操作方法:
桌面空白处点:
属性〉设置〉选择2,〉屏幕分辨率调整为800*600像素〉选中将WINDOWS桌面扩展到该监视器上〉应用〉确定。
2.先开控制箱电源,再启动扫描软件。
3.将工作台上的杂物清理干净。
4.光照环境不好时易产品光照误差,请使用稳定光源。
5.扫描工件时,请勿触动工件,否如此影响扫描结果。
6.关机时,请先关扫描软件,再关控制箱。
第二章软件使用
XHA3D软件介绍
XHA3D三维扫描软件涵盖了光栅式三维扫描仪定标、点云采集、点云拼接等各项容,可对光栅式三维扫描仪进展一系列的设备操作,并处理由其采集的点云数据。
软件运行环境:
WindowsXP系统;硬件环境:
PIV以上微机、1GB以上存、80GB以上硬盘。
XHA3D软件安装
本软件为免安装版(绿色软件),拷贝即可使用,非常方便。
将xhcv_3d22_400文件夹拷贝至随意文件夹中,打开文件夹,找到文件XHA3D,发送至桌面。
当两根USB数据线连接电脑后,发现新硬件,需安装左右两个工业传感器驱动程序。
方法如下:
C:
\ProgramFiles\XHCV\XHCV-3D20\Bin\Driver
点下一步直至安装完成。
扫描软件XHA3D主界面
该软件由控制菜单和画面显示区域、图像栏三局部组成。
显示区域可显示标志点与扫描点云数据,图像栏用于显示左右镜头所拍摄围图像,控制菜单由设备管理、数据存取、点云操作、标定相关、设置、视图栏六个菜单与扫描控制区组成,以下进展分别介绍。
快捷键介绍:
依次为:
连接、扫描、交叉线、锁定框架、仅标志点、锁定、打开、保存、快速去躁、自动校正、删除、选点、融合、设备栏、图像栏、边框参考线、编码点、抓图。
一.设备管理菜单
1.设备管理:
2.点连接设备:
图像栏显示如下文字
推荐距离:
600mm---1200mm
最大匹配距离:
0.8米:
扫描物体距离三维扫描仪0.8M为最优距离。
(删除即可)
2.数据存取:
抓存视图:
视图保存位置为:
C:
\xhcv_3d22_400\images文件夹中。
导出标志点:
如需只导出标志点,请选择此操作。
存为SFL:
科学研究专用。
〔根本不用〕
存为PLY:
保存灰度信息的点云数据。
存为ASC:
保存为点云数据。
3.点云操作:
快速去噪:
扫描出的点云数据如很好,如此不需使用。
删除选中、反向选择、取消选择、放大视图、缩小视图:
自动校正:
扫描柱面等立体三维物体时,第一次扫描的标志点与最后一次标志点数据的拼接误差最大,利用自动校正功能可拼接误差平均分布。
融合点云、锁定框架、选点模式、锁定目标、拼接收理、仅编码点:
4.标定相关:
以上参数为设备出厂前校正使用。
5.设置:
以下参数设备出厂前已调整好。
以上参数在使用时不要擅自改动。
6.视图栏:
第三章操作实例
1.调整三维扫描仪与被测物体之间距离为60CM~100CM〔80CM为最优〕
2.调整屏幕分辨率为800*600像素,
3.打开光删发生器电源,然后启动扫描软件XHA3D。
单击连接
,加载左右相机。
4.单击交叉线
,调整左右图像至大体重合位置,调节光删发生器的焦距调节器,使焦距达到最清楚状态。
5.画面显示曝光过度时,调节工业相机的焦距至画面为最优状态。
一.单面扫描
步骤如下:
1.在转台上按适当角度摆放好工件。
2.调节三维扫描仪至最优状态,启动软件,单击
开始相位计算与展开。
3.保存数据。
4.重复步骤1、2、3。
二.拼接扫描
步骤如下:
1.在转台上按适当角度摆放好均匀喷涂反差剂的工件。
2.调节三维扫描仪至最优状态,启动软件,单击
与
,再按
,启动扫描,
软件显示:
发现左(24),右(19),共(13)个标志点
当前模式只获取标志点,不进展扫描!
图像区只显示标志点。
3.在转台上继续按适当角度摆放好均匀喷涂反差剂的工件;
4.单击
锁定后,按
扫描;
单击“是〞按纽键。
重复以上步骤,直至所有的标志点都被识别。
5.取消仅标志点
,单击锁定框架
,单击
,开始扫描点云数据;
通过以上操作,选取质量较好的数据整合至标志点当中。
6.重复以上步骤,直至所有数据扫描完毕;
7.如需输出整个工件数据,选择数据存取中的存为ASC格式;如需把所有单次扫描数据分别输出选择点云操作中的拼接收理,导出既可。
仪器测量应用实例
在瞬息万变的产品市场中,能否快速地生产出符合市场要求的产品就成为企业成败的关键,而往往我们都会遇到这样的难题,就是客户给你的只有一个实物样品或模型,没有图纸或CAD数据,工程人员无法得到准确的尺寸,制造模具就更为困难。
例如,客户需要对一个自行车头盔进展设计,其复杂的形状很难进展手工测量,建立CAD数据更是难上加难。
采用ZRET系列扫描仪对其进展准确、高速地扫描,得到其三维轮廓数据,配合反求软件进展曲面重构,并对重构的曲面进展在线精度分析、评价构造效果,最终生成IGES或STL数据,据此就能进展快速成型或C数控加工。
利用ZRET三维扫描系统的标志点全自动拼接功能,对工艺品进展多角度、全方位的扫描,将工艺品的细节详细准确的采集下来,后期制作中进展数据缩放、贴纹理等操作,以此作为创意的依据。
操作小技巧
1、如何获取标志点框架
当连接好摄像机后,按下
然后再按下
扫描标志点.在取得第一次标志点后,接着按下
后,再扫描拼接其它未被扫进去的标志点.一直到构建成完整的标志点框架。
2、锁定标志点
当建立完标志点框架后,必须先按下
锁定此标志点框架。
重要提醒:
因为比照拟大的物件进展扫描时,因标示点框架的建立比拟费时,建议当取得比拟满意的标志点框架时,最好通过如图:
方法保存到一个文件夹中以备下一次使用。
3、扫描物件
当使用标志点框架对物件进展扫描拼接时,必须按下
和
这样才能拼接好,否如此可能会出现数据别离的情况。
4、数据点云的放大与缩水
当时扫描物件的过程中想更仔细的查看扫描数据的情况可以使用以下快捷键来放大与缩水点云数据。
:
CTRL+↓〔放大〕和CTRL+↑(缩水)
5、数据的导出与重建
当需要导出点云数据时,可以按F6打开拼接收理对话框。
重要提示:
导出与重建的区别
导出:
导出是将每次扫描的点云数据导出来以方便手动拼接
重建:
是将每次扫描的点云数据整合成一个数据导出
重要须知事项
 升级会员
升级会员 