第四章斜齿行星齿轮传动系统动力学分析精选.docx
《第四章斜齿行星齿轮传动系统动力学分析精选.docx》由会员分享,可在线阅读,更多相关《第四章斜齿行星齿轮传动系统动力学分析精选.docx(38页珍藏版)》请在冰豆网上搜索。
第四章斜齿行星齿轮传动系统动力学分析精选
西北工业大学硕士学位论文参考文献
第四章斜齿行星齿轮传动系统动力学分析
4.1引言
行星齿轮传动由于具有重量轻、结构紧凑、传动比大、效率高等优点,在民
用、国防领域中都得到了广泛的应用,行星齿轮传动的振动和噪声是影响传动系
统寿命和可靠性的重要因素。
近年来,国内外学者对行星齿轮传动的动态特性进
行了大量研究:
J.Lin、R.G.Parker、宋轶民等分析了行星齿轮传动的固有特性
[42-49];
A.Kahraman等研究了行星齿轮传动的均载特性[50-52],并分析了加工误差对动态响应的影响[53-54];R.G.Parker等还提出了通过控制啮合相位差抑制系统振动的方法[55-57];潜波、罗玉涛、D.R.Kiracofe等探讨了复杂行星齿轮传动的动力学建模与分
析[59-65];沈允文、孙涛、孙智民等对星型齿轮传动和行星齿轮传动的非线性动力学特性进行了深入研究[66-70]。
目前,关于行星齿轮传动的研究多针对直齿行星轮系,而对斜齿行星传动的研究还很少,所建立的模型也有待进一步完善。
建立精确的动力学模型,是研究动态特性的首要工作,本章针对斜齿行星齿轮传动,以变形协调分析为基础,建立了其耦合非线性动力学模型,推导了其运动微分方程,最后分析了斜齿行星轮系的自由振动特性,对固有频率和固有振型的特点进行了总结。
4.2系统的动力学模型及方程
4.2.1传动系统的动力学模型
行星齿轮传动平移-扭转耦合动力学模型考虑的自由度非常多,因此其动力学方程也非常复杂。
为方便动力学方程的推导,建立各个集中质量的坐标系如下:
OXY为静坐标系,其原点在行星轮系的几何中心,坐标系不随行星轮系运动;Oxy为行星架随动坐标系,其原点在行星架回转中心,固连在行星架上随行星架的运
动而等速运动,其
x轴正向通过第一个行星轮中心平衡位置;坐标系
Onxnyn为行
星轮坐标系,也固连在行星架上随之等速旋转,其原点位于行星轮的中心平衡位
置,
x轴通过太阳轮中心与行星轮中心的连线指向内齿圈,
y轴与行星架相切指
西北工业大学硕士学位论文参考文献
向行星轮中心运动速度方向。
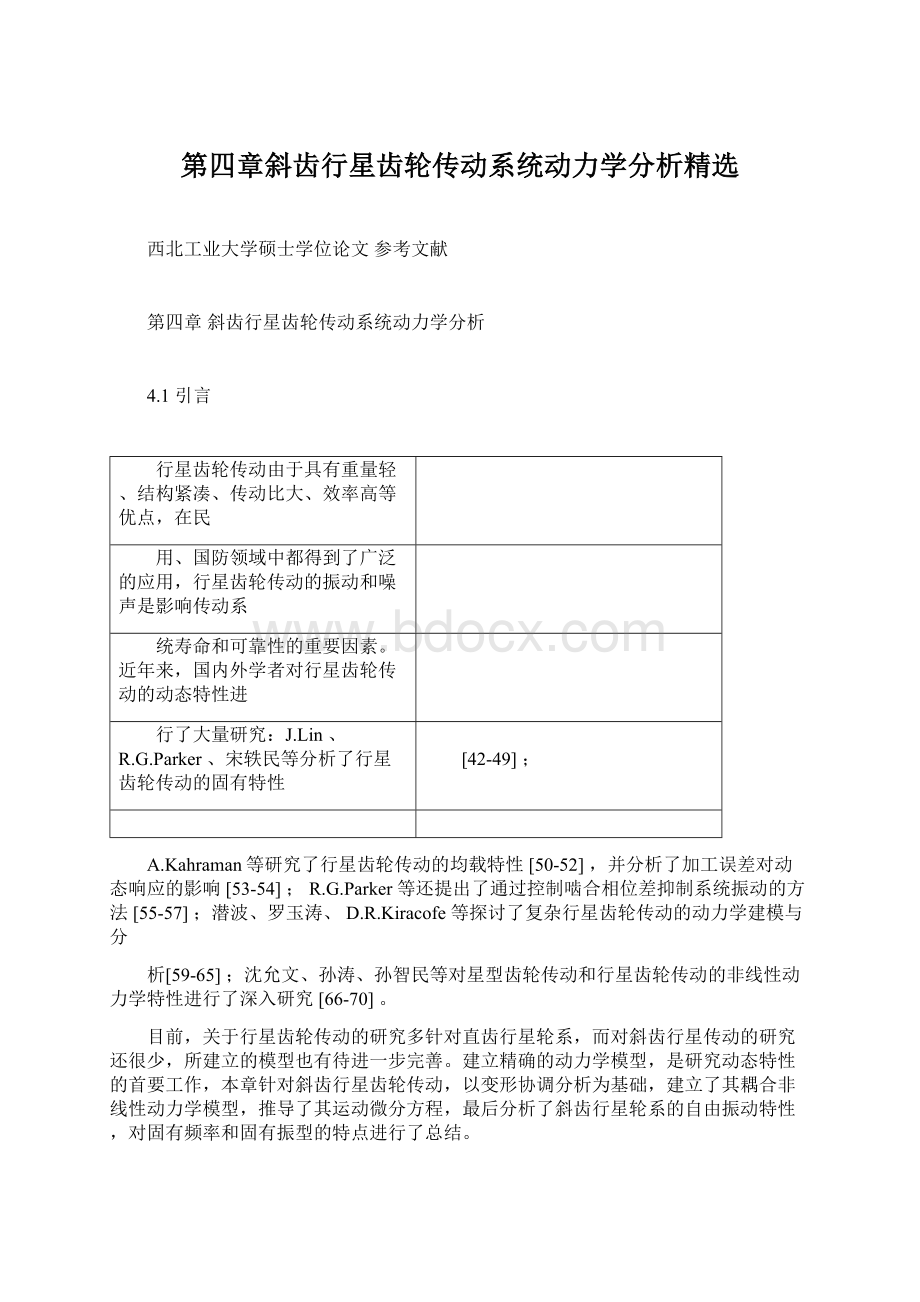
以3行星轮的传动系统为例,建立行星齿轮传动动力学模型如图4-1所示,各弹性支承及啮合副均有阻尼,为保持模型整洁阻尼符
号未在图中标出,其命名规则与刚度系数相同,只需将
k换成c。
Y
行星轮2
x2
kr
kru
kr2
y,ys,yc,yr
y2
kp
kcu
u2
ur
ksu
ks2
uc
行星轮3
太阳轮ψ2
kc
krX
ks3
u3
ks
y1
x3
kp
ks1
kpkr1
kr3
us
u1
y3
行星架
x,x1,xs,xc,xr
齿圈
kc
行星轮1
图4-1行星齿轮传动平移-扭转耦合动力学模型
端面的动力学模型还不足以表述各构件在轴向的运动情况,需要轴侧图加以
辅助说明。
斜齿行星传动中各构件在轴向的相对位移关系如图4-2所示,为表达
清晰,图中未画出内齿圈的支承和行星架。
假定各个构件在端面平移方向的刚度和阻尼相同,而在轴向的刚度和阻尼与端面方向不同。
内齿圈
cpz
kpzcp
太阳轮
crn
ksn
kp
csz
cpkrn
kp
ksz
csn
ks
cs行星轮
csks
图4-2行星轮系各构件间的相对位移
西北工业大学硕士学位论文参考文献
2K-H型斜齿行星齿轮传动系统由太阳轮、N个行星轮、行星架和内齿圈构成,
可根据使用要求固定其中任何一个构件,实现不同的功率传递形式。
图
4-1及图
4-2所示的模型中共包含有4N
12个自由度,其广义坐标分别是:
太阳轮的扭转
线位移
u
s
r
ss
r
rr
,第
n
个行星轮相对于行星架的扭
,内齿圈的扭转线位移u
r
转线位移unrnn,行星架的扭转线位移ucrcc,以及各构件在端面和轴向的平
移线位移xs,ys,zs,xr,yr,zr,xc,yc,zc,xn,yn,zn,不考虑系统的摆振。
其中rh为构件h
的基圆半径(hs,r,n;rc为行星轮中心分布圆的半径),h为构件h的角位移。
系统的广义坐标矢量可表示为:
w{xc,yc,zc,uc,xr,yr,zr,ur,xs,ys,zs,us,x1,y1,z1,u1,xN,yN,zN,uN}T
4.2.2构件的质心加速度分析
在齿轮系统动力学分析中,一般仅考虑刚体位移和弹性变形的叠加,而不考虑二者的耦合作用,也即陀螺效应。
在低速条件下,陀螺效应对系统的影响可以忽略不计,但随着系统转速的提高,耦合响应会变得越来越大,此时陀螺效应将变得不可忽略。
为建立准确的动力学模型和方程,需要对行星齿轮传动的构件质心加速进行分析,以明确陀螺效应对系统动力学特性的影响机理。
行星传动系统中构件数目较多,且存在虚约束,各构件之间的相对运动关系较为复杂。
以图4-3所示的行星架随动坐标系来分析行星轮系中各构件的运动。
Y
y
ri
yi
x
xi
θc
X
图4-3
行星架随动坐标系
图4-3
中,OXY为静坐标系,Oxy为行星架随动坐标系。
对任一时刻t,行
星架随动坐标系Oxy相对静坐标系X轴转过的角度
cct。
设ri是行星轮系中某
构件质心的位移向量,
、分别为x、y轴方向的单位矢量,xi、yi分别是ri在
x
i
可表示为:
、y轴上的投影,则r
rixi
yi
(4-1)
在静坐标系中,有eic
cosc
isin
c,则、
及二者的导数可表示为:
西北工业大学硕士学位论文
参考文献
eic
ei(c/2)
(4-2)
c
c
将ri对时间t求二阶导,并结合式(4-2)
可得构件质心加速度:
ri(xi2cyic2xi)
(yi2cxic2yi)
(4-3)
式(4-3)表明在行星架随动坐标系中,任意构件的质心加速度都可以表示为
、两个方向加速度分量的矢量和。
4.2.3构件间的相对位移分析
行星齿轮传动系统中,力的传递使存在相互作用的构件产生弹性变形,通过
构件的受力分析和变形协调分析,可以推导出构件的平衡方程。
根据图4-1、4-2
所示的构件相对位置,对各坐标方向的位移进行投影,分析构件间的相对位移关
系,以s,r表示行星轮与太阳轮、内齿圈的啮合角,在行星架随动坐标系下:
(1)
太阳轮在xs方向的位移投影到
sn方向为:
xssin(
n
s)cos
(2)
太阳轮在ys方向的位移投影到
sn方向为:
yscos(
n
s)cos
(3)
太阳轮在zs方向的位移投影到
sn方向为:
zssin
;
(4)
行星轮在xn方向的位移投影到
sn方向为:
xnsin
scos
;
(5)
行星轮在yn方向的位移投影到
sn方向为:
yncosscos
;
(6)行星轮在zn方向的位移投影到sn方向为:
znsin;
(7)行星轮在xn方向的位移投影到rn方向为:
xnsinrcos;
(8)行星轮在yn方向的位移投影到rn方向为:
yncosrcos;
(9)行星轮在zn方向的位移投影到rn方向为:
znsin;
(10)
内齿圈在xr方向的位移投影到rn方向为:
xrsin(
n
r)cos
(11)
内齿圈在yr方向的位移投影到rn方向为:
yrcos(
n
r)cos
(12)内齿圈在zr方向的位移投影到rn方向为:
zrsin;
(13)行星轮在xn方向的位移投影到xc方向为:
xncosn;
(14)行星轮在xn方向的位移投影到yc方向为:
xnsinn;
(15)行星轮在yn方向的位移投影到xc方向为:
ynsinn;
(16)行星轮在yn方向的位移投影到yc方向为:
yncosn;
(17)行星架在xc方向的位移投影到xn方向为:
xccosn;
(18)行星架在xc方向的位移投影到yn、uc方向为:
xcsinn;
(19)行星架在yc方向的位移投影到xn方向为:
ycsinn;
(20)行星架在yc方向的位移投影到yn、uc方向为:
yccosn。
;
;
;
;
西北工业大学硕士学位论文参考文献
各构件间的弹性变形是由以上各项投影位移共同作用所引起的,只需将相关
投影项叠加,便能得出不同构件在各广义坐标方向的相对位移,即弹性变形量。
在行星架随动坐标系下,考虑啮合误差的构件间相对位移可表示为:
sn
rn
(usunxnsin
(zszn)sin
(urunxnsin
xssinsnyncosyscossn)cos
esn(t)
xrsinrnyncosyrcosrn)cos
cnx
cny
cnz
cnu
pnx
pny
(zn
zr)sin
c
u
c
sin
n
x
yc
uccos
n
zc
zn
uc
yn
xcsin
xn
xccos
n
yn
uc
xcsin
ern(t)xncosnxnsinn
nyccos
ycsinn
nyccos
ynsinn
(4-4)
yncosn
n
n
式中:
sn,rn—第n个行星轮与太阳轮、内齿圈在各自啮合线方向的相对位移;
cnx,cny,cnz,cnu
—行星轮与行星架在x,y,z
u方向的相对位移;
c
cc
c
pnx,pny
—行星轮与行星架在x,y
n
方向的相对位移;
n
n—第n个行星轮中心和行星架中心连线与
xc正方向的夹角;
n2(n1)/N,sn
n
,rn
n
;
—齿轮的压力角;
—齿轮的螺旋角;
esn(t),ern(t)—第n个行星轮与太阳轮、内齿圈之间的啮合误差。
根据式(4-4)的弹性变形计算公式,可以确定构件所受各方向的作用力。
啮合
力向量始终作用在啮合面内,啮合齿轮可视为由弹簧和阻尼相连的刚体,因此,
行星轮与太阳轮、内齿圈之间的啮合力可表示为:
Fsn
ksnf(
sn)
csn
sn
(4-5)
Frn
krnf(
rn)
crn
rn
式中:
ksn,krn—第n个行星轮与太阳轮、内齿圈的啮合刚度;
csn,crn—第n个行星轮与太阳轮、内齿圈的啮合阻尼;
f(ij)—间隙函数,表示各啮合副的变形量,is,r;jn。
各行星轮沿圆周方向的分布满足均布条件,使不同行星轮与太阳轮、内齿圈
出现异步啮合,同一时刻各啮合副的刚度值并不相等。
一般的动力学分析常常忽
略异步啮合引起的啮合相位差,但从振动波形叠加的角度考虑,啮合相位差对系
统的动力学特性有着重要影响。
啮合相位差主要由构件的齿数和行星轮的个数决
定,各齿轮副间啮合相位差的计算公式为:
西北工业大学硕士学位论文
参考文献
sn
2
(n
1)zs/Np
rn
2
(n
r
p
(4-6)
1)z/N
sr
2
zp
/2
式中:
—取余运算;
Np—行星轮的个数;
zs,zp,zr—太阳轮齿数、行星轮齿数、内齿圈齿数;
sn—太阳轮与第n个行星轮啮合相对于与第一个行星轮啮合的相位差;
rn—内齿圈与第n个行星轮啮合相对于与第一个行星轮啮合的相位差;
sr—任一行星轮与太阳轮啮合相对于与内齿圈啮合的相位差。
4.2.4传动系统的动力学方程
系统中每个构件都包含两个端面平移自由度、一个轴向平移自由度和一个扭转自由度,根据牛顿第二运动定律可建立各广义坐标对应的平衡方程。
设构件h的质量为mh,转动惯量为Jh,端面平移阻尼系数为ch,轴向平移阻尼为chz,扭转
阻尼系数为chu,端面平移刚度系数为kh,轴向平移刚度系数为khz,扭转刚度系数为khu。
Th表示构件h所受的外力矩,假设外力矩方向与图4-1中各构件的旋转
方向相同。
不考虑啮合轮齿间的摩擦,则行星架、内齿圈、太阳轮、第n个行星轮的动力学微分方程可分别表示为:
mc(xc
mc(yc
mczc
Jc
2cyc
2cxc
N
cpzcnz
n1N
N
N
c2xc)
cp
cnx
kp
cnx
ccxc
kcxc
0
n
1
n
1
c2yc)
N
N
cp
cny
kp
cny
ccyc
kcyc
0
n1
n
1
N
kpz
cnz
cczzc
kczzc
0
n1
N
Tc
(4-7)
2
rc
uc
cpcnu
n1
kpcnuccuuc
kcuuc
n1
rc
N
2
mr(xr
mr(yr
mrzr
2
cyr
2
cxr
N
Frnsin
cxr)
Frncos
sin
rn
crxr
krxr
0
n1
N
c2yr)
Frncos
cos
rn
cryr
kryr
0
n
1
crzzr
krzzr
0
(4-8)
Jr
rr2ur
n1
N
r
Frncos
T
cruurkruur
n1
rr
西北工业大学硕士学位论文参考文献
ms(xs
ms(ys
mszs
Js
rs2us
2cys
2cxs
N
Fsnsin
n1N
Fsncos
n1
c2xs)
N
Fsncossinsncsxsksxs0
n1N
c2ys)
Fsncos
cossncsysksys0
n1
(4-9)
cszzs
kszzs
0
ksuus
csuus
Ts
rs
mn(xn
2
cyn
c2xn)
Fsncos
sin
Frncos
sin
cp
pnx
kp
pnx
0
mn(yn
2
cxn
2
yn)
Fsncos
cos
Frncos
cos
cp
kp
0
c
pny
pny
mnzn
Fsnsin
Frnsin
cpz
cnzkpz
cnz0
(4-10)
2
)un
Fsncos
Frncos
0
(Jn/rn
上述动力学方程组考虑了陀螺效应,从中可以看出,陀螺效应对系统影响的大小由行星架的转速直接决定。
将上述方程组写成矩阵形式,有:
Mq(CbCmcG)q(KbKmc2K)qF(4-11)
q[xc,yc,zc,uc,xr,yr,zr,ur,xs,ys,zs,us,x1,y1,z1,u1,,xN,yN,zN,uN]T
式中:
q—系统的广义坐标矢量;
M—系统的广义质量矩阵;
Cb,Cm,G—支承阻尼矩阵、啮合阻尼矩阵、陀螺矩阵;
Kb,Km,K—支承刚度矩阵、啮合刚度矩阵、向心刚度矩阵;
F—外激励矢量。
式(4-11)包含扭转方向的刚体位移,可以引入相对位移sn、rn、cnu作为新
的广义坐标,对以上四个方程组中的扭转振动方程进行合并处理,再对消除刚体位移后的方程进行无量纲化处理,最终得到系统的无量纲振动方程。
4.3传动系统的固有特性分析
4.3.1系统的自由振动微分方程
系统的自由振动方程可通过对式(4-11)进行简化处理得到。
不考虑间隙、误
差及阻尼、外载荷的影响,当行星架速度较小时,科氏力和离心力均可忽略,假
定端面平移刚度与轴向平移刚度相等,将式(4-4)代入以上四个方程组,系统的无
阻尼自由振动方程为:
西北工业大学硕士学位论文
N
N
N
N
mcxc
kcxc
kpxc
a1kpuc
a2kpxn
a1kpyn0
n
1
n
1
n1
n1
my
k
N
k
y
N
ak
u
N
ak
x
N
y
0
c
y
ak
p
n
c
cc
pc
2
pc
1
pn
2
n1
n
1
n1
n1
N
N
mczc
kczc
kpzc
kpzn
0
n
1
n
1
M
u
N
x
N
ak
yku
N
k
u
N
k
y
0
ak
c
p
n
cc
1p
2
pc
cuc
pc
n1
n1
n
1
n1
N
N
N
N
mrxr
krxr
a6krnxr
a8krnyr
a3krnzr
a4krnur
n
1
n1
n1
n1
N
N
N
N
a5krnxn
a7krnyn
a3krnzn
a4krnun
0
n1
n1
n1
n
1
N
N
N
N
mryr
a8krnxr
kryr
a13krnyr
a9krnzr
a10krnur
n1
n1
n
1
n
1
N
N
N
N
 升级会员
升级会员 