自动控制原理习题87264.docx
《自动控制原理习题87264.docx》由会员分享,可在线阅读,更多相关《自动控制原理习题87264.docx(28页珍藏版)》请在冰豆网上搜索。
自动控制原理习题87264
《自动控制原理》习题
习题1
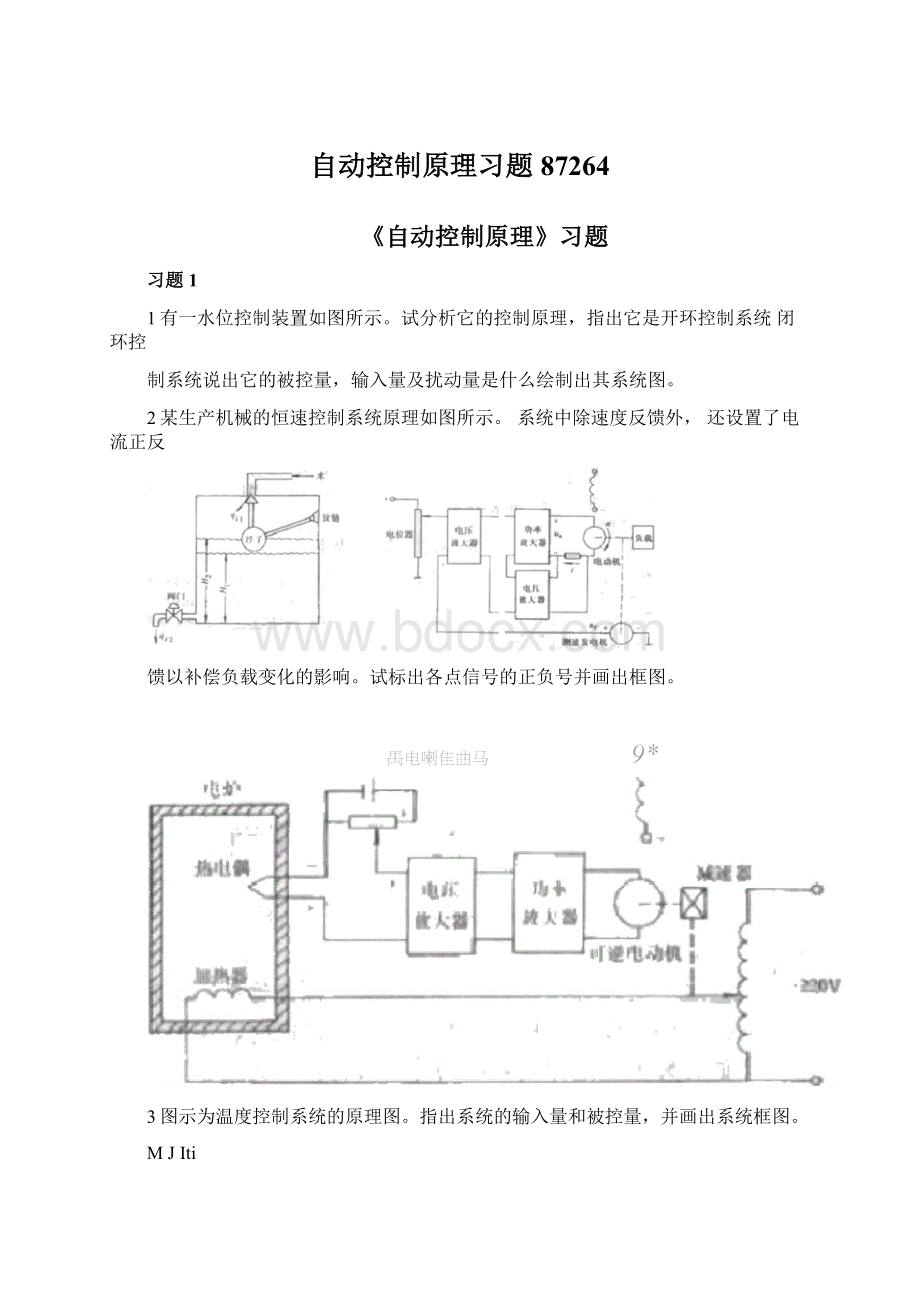
1有一水位控制装置如图所示。
试分析它的控制原理,指出它是开环控制系统闭环控
制系统说出它的被控量,输入量及扰动量是什么绘制出其系统图。
2某生产机械的恒速控制系统原理如图所示。
系统中除速度反馈外,还设置了电流正反
馈以补偿负载变化的影响。
试标出各点信号的正负号并画出框图。
3图示为温度控制系统的原理图。
指出系统的输入量和被控量,并画出系统框图。
MJIti
4•自动驾驶器用控制系统将汽车的速度限制在允许范围内。
画出方块图说明此反馈系统。
5•双输入控制系统的一个常见例子是由冷热两个阀门的家用沐浴器。
目标是同时控
制水温和流量,画出此闭环系统的方块图,你愿意让别人给你开环控制的沐浴器吗
6.开环控制系统和闭环控制系统各有什么优缺点
7•反馈控制系统的动态特性有哪几种类型生产过程希望的动态过程特性是什么
习题2
1试分别写出图示各无源网络的传递函数,。
闾⑹⑷
习题1图
2求图示各机械运动系统的传递函数。
(1)求图a的=
(2)求图b的=(3)求图c的=
A
•空[
习题2图
3试分别写出图中各有源网络的传递函数U2(s)/Ui(s)。
G)(b)0
习题3图
图中,u为控制电压.T
4交流伺服电动机的原理线路和转矩-转速特性曲线如图所示。
为电动机的输出转矩。
N为电动机的转矩。
由图可T与n、u呈非线性。
设在某平衡状态附近用增量化表示的转矩与转速、控制电压关系方程为
kn、kc为与平衡状态有关的值,可由转矩一转速特性曲线求得。
设折合到电动机的总转动惯量为J,粘滞摩擦系数为f,略去其他负载力矩,试写出交流伺服电动机的方程式并求输入
为uc,输出为转角B和转速为n时交流伺服电动机的传递函数
•mt。
习题4图
5图示一个转速控制系统,输入量是电压V,输出量是负载的转速,画出系统的结构
图,并写出其输入输出间的数学表达式。
习题5图
6已知一系统由如下方程组组成,试绘制系统框图,求出闭环传递函数。
禺⑶-兀佃)站⑸-3(弭荡(对-厲何虚。
何血⑹・巳何[尽⑷-厲的兀何]
7系统的微分方程组如下:
C(s)/R(s),C(s)/Ni(s)及
其中Ko,Ki,K2,T均为正常数。
试建立系统结构图,并求传递函数
C(s)/N2(s)。
习题8图
9试用梅逊公式求解习题8图所示系统的传递函数C(s)/R(s)。
习题10图
11已知系统结构图如习题11图所示,试写出系统在输入R(s)及扰动N(s)同时作用下输
出C(s)的表达式。
12已知系统结构如习题12图所示,试将其转换成信号流图,并求出qs)/R(s)。
习题12图
13系统的信号流图如习题13图所示,试求qs)/R(s)。
习题13图
14习题14图是一个模拟调节器的电路示意图。
(a)写出输入Ur与输出uc之间的微分方程;
(b)建立该调节器的结构图;
(C)求闭环传递函数Uc(S)/Ur(S)。
习题14图
15某弹簧的力-位移特性曲线如习题17图所示。
在仅存在小扰动的情况下,当工作点
分别为
X。
=、0、时,试计算弹簧在工作点附近的弹性系数。
习题15图
16试求习题16图所示结构图的传递函数C(s)/Rs)。
习题16图
17已知系统结构图如习题17图所示,求传递函数C1(s)/R1(s),C2(s)/R1(s),C1(s)/R?
(s),
C2(s)/R2(s)o
18放大器可能存在死区,其工作特性曲线如习题18图所示。
在近似线性工作区,
可以用3次函数y=ax3来近似描述放大器的输入-输出特性。
当工作点为x=时,试选择a的合适取值,并确定放大器的线性近似模型。
习题18图
习题3
1一单位反馈系统的开环传递函数为
求①系统的单位阶跃响应及动态性能指标b%,ts,tp②输入量为单位脉冲函数时系统
的输出响应。
2设控制系统闭环传递函数为
%
试在s平面上绘出满足下述要求的系统特征方程式根可能位于的区域。
(a)1>>,n>2
(b)>>0,4>n>2
(c)>>,nW23一单位反馈系统的开环传递函数为
Gk(s)=3n2/s(s+2E®n)
已知系统的r(t)=1
(1),误差时间函数为
e(t)=
4已知二阶系统的闭环传递函数为
确定在下述参数时的闭环极点,并求系统的单位阶跃响应曲线和相应的性能指标。
(a)=2,n=5;
(b),n=5;
(c)当》时,说明是否可忽略距离原点较远的极点及理由。
5单位反馈系统的开环传递函数为
熒)二一
心"+2s+2)
(a)求系统在单位阶跃输入信号r(t)=1(t)作用下的误差函数e(t);
(b)是否可以用拉普拉斯变换的终值定理求系统的稳态误差,为什么
6单位反馈系统的开环传递函数为
%)企
(6十1)(55'■十屯十10)
(a)当K=1时,求系统在r(t)=1(t)作用下的稳态误差;
(b)当r(t)=1(t)时,为使稳态误差es尸,试确定K值。
7已知单位反馈系统闭环传递函数为
巴何百应4-如
AC9"?
+L25?
45.1?
+16?
+10
(a)在单位斜坡输入时,确定使稳态误差为零的参数bo、bi应满足的条件;
(b)在(a)求得的参数b。
、bi下,求单位抛物线输入时,系统的稳态误差。
8系统结构图如习题8图所示。
(a)当r(t)=t,n(t)=t时,试求系统总稳态误差;
(b)当r(t)=1(t),n(t)=0时,试求p、tp。
9设单位反馈控制系统的开环传递函数为
1QQ
5(0.1+1)
试求当输入信号r(t)=1+2t+t2时,系统的稳态误差。
10有闭环系统的特征方程式如下,试用劳斯判据判定系统的稳定性,并说明特征根在复平面上的分布。
S3+20s2+4s+50=0
U+2s3+6s2+8s=0
Q+3s5+9s4+18s3+22s2+12s+12=0
11某控制系统如图3-47所示。
其中控制器采用增益为Kp的比例控制器,即Gc(s)=Kp,
试确定使系统稳定的Kp值范围。
习题11图
12某控制系统的开环传递函数为
试确定能使闭环系统稳定的参数K、T的取值范围。
13已知某系统的结构与参数如习题13图所示。
(a)当输入R(s)=1/s,N(s)=O时,试求系统的瞬态响应;
14已知某系统的结构图如习题14图所示,其中系统的时间常数为1=10秒和2=50秒,
K=3。
试求R(s)从1/s变化到2/s,且N(s)=1/s时系统的瞬态响应,并求系统此时的稳态误差ess,其中E(s)=R(s)-C(s)。
习题14图
15已知系统结构图如习题15图所示。
(a)求K=3,r(t)=t时的稳态误差ess;
(b)如果欲使essW,试问是否可以通过改变K值达到,为什么
16系统的结构图如习题16图所示,其中e=r-c,K、Ti、T2均大于零。
(a)当=1时系统是几型的
(b)如果r(t)为单位阶跃函数,试选择使系统的稳态误差为零。
17系统结构图如习题17图所示,其中e=r-c,K1、T均大于零。
(a)当K2=0时系统是几型的
(b)如果r(t)为单位斜坡函数,试选择K2使系统的稳态误差为零。
18设单位反馈系统的开环传递函数为
r(s/3+1)0+1)
若要求闭环特征方程根的实部均小于-1,试问K应在什么范围取值如果要求实部均小于2,情况又如何
19某系统的闭环传递函数为
&Q3十8s十十S)
试分析零点-3和极点-8对系统瞬态性能(如超调量、调整时间等)的影响。
20某闭环系统的结构图如习题20图所示,其中分别0,,和。
(a)分别计算系统的单位阶跃响应,并画出相应的响应曲线。
在此基础上,求出系统的超调量、上升时间和调整时间;
(b)讨论对系统响应的影响,并比较开环零点-1/与闭环极点的位置关系。
21某闭环系统的结构图如习题21图所示,其中分别0,,2和5。
(a)分别计算系统的单位阶跃响应,并画出相应的响应曲线。
在此基础上,求出系统的超调量、上升时间和调整时间;
(b)讨论对系统响应的影响,并比较开环极点-1/与闭环极点的位置关系。
习题21图
22某闭环系统的结构图如习题22图所示,其控制器的零点可变。
(a)分别计算a=0和a工0时系统对阶跃输入的稳态误差;
(b)画出a=0,10和100这3中情况下系统对阶跃干扰的响应曲线,并在比较的基础上,从a的3个取值中选择最佳值。
23电枢控制直流电动机的结构图如习题23图所示。
(a)试计算系统对斜坡输入r(t)=t的稳态误差,其中Km=10,Kb=,K为待定参数。
如果
要求稳态误差等于1,试确定K的取值;
(b)画出系统在0习题23图
24试选择Ki和K2的值,使图3-64所示系统阶跃响应的峰值时间为秒,超调量可以忽略不计(即%<超调量<%)。
习题24图
25控制系统的结构图如习题25图所示。
(a)确定该闭环系统的2阶近似模型;
(b)应用2阶近似模型,选择增益K的取值,使系统对阶跃输入的超调量小于15%,稳态误差小于。
习题25图
26设单位反馈系统的开环传递函数分别为
1Gk(s)=K(s+1)/s(s-1)(s+5)
2Gk(s)=K/s(s-1)(s+5)
试确定分别使闭环系统稳定的开环增益的取值范围。
习题4
1设开环系统的零、极点在s平面上的分布图如下图所示,试绘制相应的根轨迹草图。
2已知系统的特征方程为
⑴二打一二-..
(s+1)(^+1r*=0
试绘制以匸为参数的根轨迹图。
3设单位反馈系统的开环传递函数
(1)试绘制系统根轨迹大致图形,并分析系统的稳定性。
(2)若增加一个零点z=-1,试问根轨迹图有何变化,对系统稳定性有何影响。
4已知单位负反馈系统的开环传递函数
试用根轨迹法来确定使闭环主导极点的阻尼比Z=和自然角频率3n=2时的L取值。
5设负反馈系统的开环传递函数为
^(0.01ff+lX0.02ff+l)
⑴作出系统准确的根轨迹;
⑵确定使系统临界稳定的开环增益
⑶确定与系统临界阻尼比相应的开环增益己。
6单位负反馈系统的开环传递函数为
试绘制系统的根轨迹图,并确定产生纯虚根•时的z值和」-值。
7设控制系统的开环传递函数如下,试画出参数b从零变到无穷时的根轨迹图。
30(5+6)
8设控制系统的开环传递函数为
ff\7+2)(7+4)
试画出系统分别为正反馈和负反馈时的根轨迹图,并分析它们的稳定性。
9已知正反馈系统的开环传递函数为
'<1||:
''了‘试绘制系统的根轨迹图。
10非最小相位系统的特征方程为
(s+1)(s+3)(ff-1)0―可++4)=0
试绘制该系统的根轨迹图。
11已知非最小相位负反馈系统的开环传递函数为
试绘制该系统的根轨迹图。
12反馈系统的开环传递函数为
K(^.25s+1)
试用根轨迹法确定系统无超调响应时的开环增益芒。
13设负反馈控制系统的开环传递函数为
证明系统的根轨迹含有圆弧的分支。
14如习题14图所示控制系统
⑴画出系统的根轨迹图;
⑵求系统输出c(t)无振荡分量时的闭环传递函数。
试绘制系统根轨迹的大致图形。
若系统
⑴增加一个z=-5的零点;
⑵增加一个乙=的零点;
⑶增加一个乙=的零点。
试绘制增加零点后系统的根轨迹,并分析增加开环零点后根轨迹的变化规律和对系统性能的影响。
16已知负反馈系统的传递函数为
$帖賠?
班甘十
⑴利用Matlab有关函数作出Owa1时系统的根轨迹和单位阶跃响应曲线;
⑵讨论a值变化对系统动态性能及稳定性的影响(0w孔1=;
17设单位反馈系统的开环传递函数
皿A
若要求系统的增益为,,=90,试求a为何值才能满足闭环系统最大超调量%_18%的要
求
习题5
1若系统单位阶跃响应
y(t)=+t>=0
试求系统频率特性。
2已知单位反馈系统的开环传递函数如下,试绘制其开环频率特性的极坐标图。
(2)
(6)
25C1402Q
s2十2?
十1
20
(7)
2)(f+5)
⑻2,t
5(0.5y-l)
(10)
&(1+5s)
(9)
3已知某系统的开环传递函数为
^(0255+1)^-1)
3-D
s(s+1)
应用奈氏判据判断闭环系统的稳定性。
4设系统的开环传递函数为
试画出下面两种情况下系统的极坐标图
⑴£>7f>0,7;>71>0j⑵可>7;>0,爲〉爲》CU
5设一反馈控制系统的特征方程为
*5材+(2^-^^+10=0
应用奈氏判据确定使闭环系统稳定的K的数值,再用劳斯判据检验得到的结果。
6绘出下列传递函数的幅相特性
G(s)=——勺——
<16?
2+2*4^0.8^+y
7设系统的开环对数幅频特性的分段直线近似表示如图所示(设为最小线性相位系统)。
试写出系统的开环传递函数。
题個
8设系统的开环幅相频率特性如图所示。
试判断闭环系统的稳定性。
图中,p表示系
统开环极点在右半s平面上的数目。
若闭环不稳定,试计算在右半s平面的闭环极点数。
9画出下列开环传递函数的幅相特性,并判断其闭环系统的稳定性。
2刃
式E+习@+15)
250
心+5)(J=1R
10已知系统开环传递函数分别为
⑴*~贰0怎治匚1((00^41)
75(02^+1)
s2(0.025^l)(0.006s^
试绘制伯德图,求相位裕量,并判断闭环系统的稳定性。
11设单位反馈系统的开环传递函数为
0(8)=
^(0,15+
当输入信号r(t)=5sin2w时,求系统的稳态误差。
12单位反馈系统的开环传递函数为
——
如仏+1〕
试用频域和时域关系求系统的超调量3%及调节时间ts.
13设一单位反馈控制系统的开环传递函数
G⑶
&0+1)(%斗1)
(1)确定使系统的谐振峰值Mp=的K值。
(2)确定使系统的幅值裕度
G1M1=20db的K值。
(3)确定使系统的相角裕量
r(Wc)=60时的值。
习题6
1单位反馈系统的的开环频率特性为
25
Go(j&)=
7^+1X025^+!
)
2)串联相位
为使系统具有-4-=-的相角裕度,试确定:
(1)串联相位超前校正装置;(
滞后校正装置;(3)串联相位滞后-超前校正装置。
2设单位反馈系统的开环传递函数为
为使系统具有如下性能指标:
加速度误差系数「--谐振峰值谐振频
(L1jf?
率,.-•「。
试用期望对数频率法确定校正装置的形式和特性。
3设单位反馈系统的开环传递函数为
O(s)=
10
s(s+2)(s+8)
设计一校正装置,使静态速度误差系数"-_',并使闭环主导极点位于s=-2±j23。
4设单位反馈系统的开环传递函数为
(1)如果要求系统在单位阶跃输入作用下的超调量廿=二7,试确定k值。
(2)根据所确定的K值,求出系统在单位阶跃输入下的调节时间,以及静态速度误差系数。
(3)设计一串联校正装置,使系统二,减少两倍以上。
5已知单位反馈系统开环传递函数为
G(s)
孔0.3+1)(0公+0
设计校正网络,使‘。
6由实验测得单位反馈二阶系统的单位阶跃响应如习题6图所示
要求:
(1)绘制系统的方框图,并标出参数值;
校正环节并画出校正后系统的方框图。
ltire
…71\_
/g—一
/\
t/s
Jb
1
.7设原
系统的开环传递函
数为
(1)试求串联超前校正装置;
(2)试求串联滞后校正装置
(3)比较以上两种校正方式的特点,得出何结论。
8设控制系统的开环频率特性为
要使系统的相角裕度「L,,系统的加速度误差系数Ka=10,试用频率法设计串联超
前校正装置。
9反馈控制系统的开环传递函数为
采用串联超前校正,使系统的相角裕度.-,在单位斜坡输入下的稳态误差为ess=.
系统的剪切频率小于弧度/秒。
10设单位反馈控制系统的开环传递函数为
松如怎+D
若使系统的相角裕度r4',速度误差系数K=8,试设计串联滞后校正装置。
11系统如习题11图所示,其中R1,R2和C组成校正网络。
要求校正后系统的稳态误差为ess=,相角裕度r>60度,试确定K,R,R2和C的参数。
12反馈系统的结构图如习题12图所示,为保证系统有45度的相角裕度,求电
容c为多少
13已知单位反馈控制系统的开环传递函数为
试设计串联校正环节,使系统的相角裕度,-,1=',剪切频率。
14某单位反馈系统开环传递函数为
现要求'■",J-_'卩",试确定串联校正装置。
10
15设控制系统的开环传递函数为
恥flCQ.05s+l)(Q.25ff+l)
要求校正后系统的相对谐振峰值Mr=,谐振频率=,试设计串联校正环节。
16设控制系统的开环传递函数为
旳=J4
—£十V十
3卩37
若使闭环系统的谐振峰值Mr=,谐振频率匕二八】i
,系统的速度误差系数
-375秒一1,试设计滞后-超前校正装置。
17控制系统的开环传递函数为
孔1+皿)(17,2打
要使系统的相角裕度'4,单位斜坡输入时系统的稳态误差"■■■■_'',试用频
率法设计串联滞后-超前校正网络。
18设I型系统的开环传递函数为
^0.15+1)(0.0155+1)
试用希望特性法确定使系统达到下列性能指标的校正装置:
(1)稳态速度误差系统丄-秒一1;
(2)超调量□二二二;
(3)调节时间-二|-秒。
19控制系统如习题19图所示。
习题却图
20图所示曲线1,11.
20最小相位系统校正前、后的开环对数幅频特性如习题
(1)画出串联校正装置的对数幅频特性;
(2)写出串联校正装置的传递函数。
习题7
1试求aK的Z变换。
5根据下列G(s)求取相应的脉冲传递函数G(z)。
£5(S+CJ)
Tt“W卜
7离散系统如图所示(T=1s)。
求1)当K=8时分析系统的稳定性。
2)当系统临界稳定时K的取值。
8系统结构图如图所示,其中
K=10,Ts=,输入函数r(t)=1(t)+t+,求系统的稳态误
10离散系统下,图中,试确定使系统稳定时,K的取值范围,并确定采样周期Ts对系统稳定性的影响(Ts>0)。
11系统结构图如图所示,图中,。
试绘制G1G2(w)
■百+1)
的对数频率特性(伯德图),并求出相角稳定裕度等于45度时K的取值。
习题8
1判断下图所对应的系统是否稳定;-1/N(A)与G(jw)的相交点是否为稳定的自持震荡点。
2非线性系统如图所示。
试用描述函数法,确定线性部分的传递函数如下列情况时,系统是
否产生自持震荡,若产生自持震荡,求自持震荡的频率及振幅。
图中,G(s)有两种情况:
3非线性系统如图所示。
试用描述函数法,分析K=10时,系统的稳定性,并求K的临界值。
图中“
Me+l)(s+2)
4非线性系统如图所示。
试确定自震的振幅和频率。
图中,一一“—2
||
/T
*
1.利“
11■
T
V1
—1
1亠
E
5非线性系统如图所示。
设a=1,b=3用描述函数法分析系统的稳定性,为了使系统稳定,继
2
电器的参数a、b应如何调整。
图中,"一
5(0.5s+1Xs+1)
6非线性系统如图所示。
用描述函数法确定自震荡的频率和振幅。
图中,
7非线性控制系统如图所示。
试用描述函数法分析系统的稳定性。
图中
G(s)=―-—o
如1〕
 升级会员
升级会员 