UR5机器人运动学及奇异性分析.docx
《UR5机器人运动学及奇异性分析.docx》由会员分享,可在线阅读,更多相关《UR5机器人运动学及奇异性分析.docx(19页珍藏版)》请在冰豆网上搜索。
UR5机器人运动学及奇异性分析
UR5机器人运动学及奇异性分析
作者:
张付祥赵阳
来源:
《河北科技大学学报》2019年第01期
摘要:
为了解决UR5机器人用户建立的机器人坐标系与厂家建立的机器人坐标系不一致,机器人内部有关力、角速度、角加速度等数据信息难以被直接使用的问题,在分析UR5机器人结构特点的基础上,建立与厂家数据匹配的坐标系。
采用D-H参数法建立UR5机器人的运动学方程,描述机器人各杆件的相对位姿关系,依据UR5机器人满足Pieper准则的结构特性,采用分离变量法求取UR5机器人的运动学反解,并利用微分变换法完成UR5机器人奇异位形分析,奇异性分析与仿真结果表明了UR5机器人位置奇异时各关节变量之间的关系。
使用MATLAB软件编写运动学程序,并利用机器人系统对程序进行实验室测试与工程实践验证,MATLAB运动学程序实验结果与UR5系统内部数据一致,验证了运动学分析的正确性。
研究结果对进一步开展UR5机器人连续轨迹规划研究具有参考价值。
关键词:
工业机器人技术;坐标系;运动学;微分变换法;奇异性
中图分类号:
TH122文献标志码:
A
ZHANGFuxiang,ZHAOYang.KinematicsandsingularityanalysisofUR5robot[J].JournalofHebeiUniversityofScienceandTechno-logy,2019,40
(1):
51-59.KinematicsandsingularityanalysisofUR5robot
ZHANGFuxiang,ZHAOYang
(SchoolofMechanicalEngineering,HebeiUniversityofScienceandTechnology,Shijiazhuang,Hebei050018,China)
Abstract:
InordertosolvetheproblemthattheUR5robotcoordinatesystemestablishedbytheuserisinconsistentwiththemanufacturer's,andthedatarelatedtotheforce,angularvelocity,angularaccelerationaredifficulttobedirectlyused,basedontheanalysisofthestructuralcharacteristicsoftheUR5robot,thecoordinatesystemmatchingthemanufacturer'sdataisestablished.ThekinematicsequationoftheUR5robotisestablishedbyD-Hmethodtodescribetherelationshipofeachjoint.AccordingtothestructuralcharacteristicssatisfyingthePiepercriterionoftheUR5robot,thekinematicinversesolutionoftheUR5robotisobtainedbytheseparationvariablemethod.ThesingularityanalysisofUR5robotiscompletedbydifferentialtransformationmethod,andthesingularityanalysisandsimulationresultsshowtherelationshipbetweenthejointvariablesofUR5robotwhenthepositionissingular.ThekinematicsprogramiswrittenbyusingMATLABsoftware,andtherobotsystemisusedtocarryoutlaboratorytestandengineeringpracticeverification.TheexperimentalresultsofMATLABkinematicsprogramareconsistentwiththeinternaldataofUR5system,whichverifiesthecorrectnessofkinematicsanalysis.TheresearchresulthassomereferenceforfurtherresearchofUR5robotcontinuoustrajectoryplanning.
Keywords:
industrialrobottechnology;coordinatesystem;kinematics;differentialtransformation;singularity
随着中国制造强国战略第1个十年行动纲领“中国制造2025”的提出与实施,机器人在各行各业中的应用率日益攀升。
串联机器人作为一种典型拟人化机电设备,以其结构简单、控制简单、运动空间大且灵活等特点[1-3]被广泛应用在焊接、喷漆、涂胶、搬运、装配等领域[4]。
UR5机器人是丹麦UniversalRobots公司[5]推出的新型人机协作机器人[6],它具有快速、灵敏、安全、重量轻以及易于编程等优点[7]。
作为一款新型的六自由度机器人,它能实现6个关节360°旋转,比普通的六自由度机械臂拥有更大的操作空间,同时具有更好的动力學优点和避障特性[8]。
河北科技大学学报2019年第1期张付祥,等:
UR5机器人运动学及奇异性分析随着UR系列机器人在国内应用越来越广泛,众多国内学者逐渐关注该系列机器人并进行研究。
文献[7—10]中建立了各自的UR机器人运行学坐标系,给出了相应的结构参数并用实验验证了各自结果的正确性。
但上述文献中建立的机器人坐标系与厂家建立的机器人坐标系并不一致,这就导致在他们各自坐标系下描述的机器人位姿与厂家描述的机器人位姿不符。
由于用户和厂家机器人坐标系的差异,从机器人系统内部读取的力、角速度、角加速度等数据信息与用户建立的机器人坐标系下的数据不匹配,从而导致机器人内部信息无法使用。
在机器人轨迹规划等高级应用时,由于坐标系的差异,用户不能直接使用机器人关节信息求取机器人某一时刻的位姿,也不能利用UR机器人操控系统中的机器人位姿信息和用户自行求解的逆向运动学表达式求解机器人关节变量。
在目标位姿数目较少的工程应用中,可以通過示教模式进行点对点的操作,但要对机器人进行连续轨迹规划时就会变得非常繁琐与不便。
为了解决上述问题,笔者在分析UR5机器人结构特点的基础上,建立与机器人厂家数据匹配的机器人坐标系,并完成机器人奇异位形分析。
研究结果可为UR5机器人的高级应用提供参考。
1UR5机器人正向运动学
1.1UR5机器人坐标系建立
UR5机器人由6个转动关节组成,包括腰部、肩部、肘部以及3个自由度的腕关节。
由于UniversalRobots公司并未提供UR5机器人的坐标系,为便于机器人各种传感信息的调用以及未来的高级应用,需要建立与UR5厂家相一致的机器人坐标系,进而掌握UR5机器人关节空间与笛卡尔空间的联系。
D-H参数法建立机器人杆件坐标系的方法有两种:
第1种杆件坐标系与第2种杆件坐标系[11]。
按照前者建立坐标系时,相邻2个杆件(i-1)与i的杆件坐标系{i-1}与{i}都固定在杆件的关节编号大的关节处,而后者坐标建立方式与前者相反,坐标系固定在杆件编号小的关节位置处。
采用第1种连杆坐标系建立方法建立UR5机器人坐标系,机器人各关图1UR5机器人坐标系
Fig.1UR5robotcoordinatesystem节初始转角与机器人实际初始转角不符,机器人末端的位姿矩阵也与机器人系统描述的位姿矩阵不同。
采用第2种连杆坐标系建立方法建立UR5机器人的坐标系,并依据UR5机器人系统提供的初始位置关节角度以及各关节运动方向对坐标系进行调整,最终建立起和厂家数据匹配的UR5机器人坐标系如图1所示。
图1中,为减小机构偏心对位姿矩阵精度造成的影响,将固联在杆件2上的坐标系{2}移动至与坐标系{1}相重合。
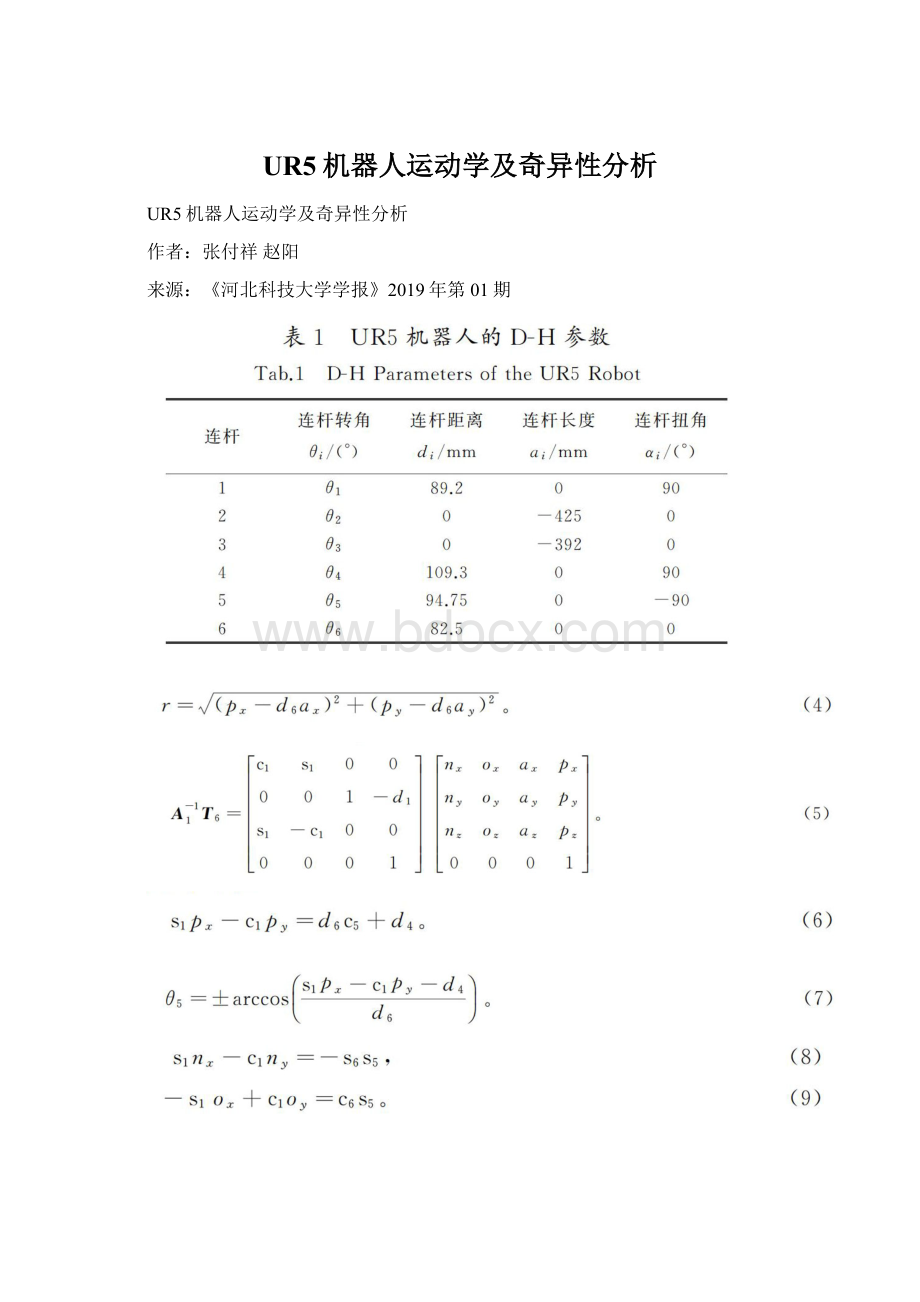
根据建立的UR5机器人坐标系,确定UR5机器人的D-H参数如表1所示。
1.2正向运动学方程
相邻2个坐标系之间的齐次变换矩阵可用An表示[12],其表达式如下:
An=Rot(z,θn)Trans(0,0,dn)Trans(an,0,0)Rot(x,αn)。
式中:
Rot(z,θn)表示绕z轴旋转了θn角;Trans(0,0,dn)表示沿z轴平移了dn个单位;Trans(an,0,0)表示沿x轴平移了an个单位;Rot(x,αn)表示绕x轴旋转了αn角。
为了简化三角函数符号,以sθn表示sinθn,cθn表示cosθn,sαn表示sinαn,cαn表示cosαn。
相邻2个坐标系之间的齐次变换矩阵可表示为An=cθn-sθncαnsθnsαnαnc
0001。
依据上式,可以计算出UR5机器人各个连杆坐标系之间的齐次变换矩阵A1—A6如下:
A1=c10s10
A1—A6中si表示sinθi,ci表示cosθi,ai,di对应表1中相应的D-H参数。
结合UR5机器人的D-H参数,将齐次变换矩阵A1—A6连乘得到UR5机器人从基座到末端工具的齐次变换矩阵T6:
T6=A1A2A3A4A5A6=nxoxaxpx
上述式中:
si表示sinθi,ci表示cosθi,s23表示sin(θ2+θ3),c23表示cos(θ2+θ3),s234表示sin(θ2+θ3+θ4),c234表示cos(θ2+θ3+θ4)。
下文中相同符号代表相同含义。
2UR5机器人逆向运动学
UR5作为一款全关节可360°旋转的新型人机协作机器人,其肩部、肘部与第1腕关节3个相邻关节互相平行,满足机器人机构学中的Pieper准则[13],其运动学逆解具有封闭解[14]。
根据运动学正解的结果,采用解析法[15]中的分离变量法[16]进行运动学逆解的求取。
将UR5机器人齐次变换矩阵T6左乘矩阵A-11,右乘矩阵A-16可得:
A-11T6A-16=c1s100
(1)式
(1)左右两侧的第3行第4列元素相等,可得:
s1(px-d6ax)-c1(py-d6ay)=d4。
(2)对式
(2)进行三角函数运算,可得:
θ1=arctanpy-d6aypx-d6ax±arccosd4r。
(3)式中r的表达式为r=(px-d6ax)2+(py-d6ay)2。
(4)将UR5机器人齐次变换矩阵T6左乘矩阵A-11,可得:
A-11T6=c1s100
(5)由式(5)两侧的第3行第4列元素相等可得:
s1px-c1py=d6c5+d4。
(6)对式(6)进行化简可得:
θ5=±arccoss1px-c1py-d4d6。
(7)由式(5)中左右两侧的第3行第1列与第3行第2列相等可得:
s1nx-c1ny=-s6s5,(8)
-s1ox+c1oy=c6s5。
(9)联立式(8)和式(9)可得:
θ6=±arccos-s1ox+c1oys1nx-c1ny。
(10)由式
(1)左右两侧第1行第3列与第2行第3列相等可得:
-(c1ax+s1ay)=s5c234,(11)
az=-s5s234。
(12)联立式(11)与式(12)可得:
θ234=arccosazc1ax+s1ay。
(13)由式(5)的第1行第4列与第2行第4列相等可得:
-d6(c1ax+s1ay)+c1px+s1py=a2c2+a3c23+d5s234,(14)
-d6az+pz-d1=a2s2+a3s23-d5c234。
(15)联立式(14)与式(15),消除变量θ23(即θ2+θ3)可得:
(m1-a2c2)2+(m2-a2s2)2=a23。
(16)式(16)中m1与m2分别为m1=-d6(c1ax+s1ay)+c1px+s1py-d5s234,(17)
m2=-d6az+pz+d5c234-d1;,;;;;;;;;;;;;;;;;;;;;;;(18)整理可得:
θ2=arccosm21+m22+a22-a23(2×a2×m1)2+(2×a2×m2)2+arctanm2m1。
(19)联立式(14)与式(15)可得:
θ23=arctan-d6az+pz-d1+d5c234+a3s2-d6(c1ax+s1ay)+c1py+s1px-d5s234+a3s2。
(20)联立式(13)与式(20)可得:
θ4=θ234-θ23;;。
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;(21)联立式(19)与式(20)可得:
θ3=θ23-θ2。
(22)至此,UR5机器人的6个关节转角全部求出。
3UR5奇异性分析
奇异位形是机器人机构学中重要的运动学特性[17-18]。
当机器人处于奇异位形时,末端执行器的位移或旋转运动受到限制。
此时,机器人一般实际可操作自由度会减少,末端执行器不能实现某些方向的运动,也会出现某些关节角速度趋于无穷,导致机械手运动失控,机器人不能实现预定的动作[19]。
由于奇异位形会严重影响机器人运动的稳定性,所以奇异位形分析对机器人平稳安全运动具有重要意义[20]。
雅克比矩阵反映单个关节微分运动与机器人整体微分运动之间的关系,它是判断机器人奇异位形的重要依据,通过分析机器人处于奇异位形时的雅克比矩阵,可以得到奇异位形的约束条件,并实现对机器人的平稳控制。
机器人雅克比矩阵的求解方法有矢量积法[21]、微分变换法[20]和螺旋运动求解法[22]。
这里采用微分变换法求解雅克比矩阵。
进行雅克比矩阵运算时,如果关节i是转动关节,则雅克比矩阵J的第i列按式(23)计算。
若关节i是移动关节,则雅克比矩阵J的第i列按式(24)计算:
TJi=[nzozaz000]T。
(24)式(23)与式(24)中的n,o,a,p分别代表inT的4个列向量,inT的计算如下所示:
1nT=A1A2…An,2nT=A2A3…An,3nT=A3A4…An,…,nnT=An。
UR5机器人的6个关节全为转动关节,依据式(22)计算雅克比矩阵的各个列向量如下:
TJ1=pxny-pynx
依据以上雅克比矩阵各个列元素,可得:
TJ=[TJ1TJ2TJ3TJ4TJ5TJ6]。
机器人机构处于奇异位形时,雅克比行列式等于零,据此条件可得:
-a2s5(-a3s3+d5c34)(-a3c23-d5s234-a2c2)。
令上式为零,可得3种奇异位形:
-a3s3+d5c34=0,-a3c23-d5s234-a2c2=0和s5=0。
由等式-a3s3+d5c34=0可知,该奇异位形与关节3、关节4有关。
通过仿真,关节3与关节4的关系如图2所示;由等式-a3c23-d5s234-a2c2=0可知,该奇异位形与关节2—关节4有关,并得到当等式-a3c23-d5s234-a2c2=0时,关节2—关节4的关系如图3所示;由等式s5=0可知,关节5的角度为0或180°时,机器人机构处于奇异点,此时关节4与关节6共面,如图4所示。
4实验验证与工程应用
依据D-H法建立机器人坐标系后,经过理论分析与计算,最终完成机器人正向运动学与逆向运动学的解析表达式求解,并以此为基础完成了机器人正逆向运动学控制程序的编写,同时采用实际的UR5机器人系统进行实验验证。
4.1正向运动学验证
已知机器人关节角度,利用编写的程序运算出相应的位姿矩阵,并根据机器人系统数据加以验证,两组测试点测试如下。
1)設定关节角度:
[90.00°,-90.00°,45.00°,-90.00°,45.00°,45.00°],运动学计算位姿矩阵:
n=[0.50,0.15,-0.85,0],o=[-0.50,0.85,-0.15,0],a=[0.71,0.50,0.50,0],p=[167.45,-302.94,899.64,1]。
UR5机器人系统面板数据如图5所示,机器人实际位置p=[167.34,-303.14,899.60],左上角图形表示机器人实际形态,x,y,z表示机器人末端执行器的实际位置,下部为各个关节角度。
2)设定关节角度:
[45.00°,-30.00°,-60.00°,-45.00°,60.00°,30.00°],运动学计算位姿矩阵:
n=[056,-0.50,-0.66,0],o=[0.25,0.86,-0.44,0],a=[0.79,0.08,0.61,0],p=[-165.45,-378.36,811.22,1]。
UR5机器人系统面板数据如图6所示,机器人实际位置p=[-165.67,-378.24,811.23],左上角位置图形表示机器人实际形态,x,y,z表示机器人末端执行器的实际位置,下部为各个关节角度。
图5测试点1系统面板数据
Fig.5Testpoint1systempaneldata图6测试点2系统面板数据
Fig.6Testpoint2systempaneldata
通过PC机与机器人系统通信,读取系统内部有关机器人末端执行器的x,y,z值与关节角度信息,结果如表2、表3所示。
工控机作为上位机,基于TCP/IP协议端口完成机器人通信建立,通过30003实时反馈端口按照脚本语言的格式编写程序发送给控制器,UR5工业机器人将反馈信息数据包发送至工控机端口,2个测试点的数据分别如图7和图8所示。
考虑机器人结构尺寸、位姿矩阵数据取舍以及机器人系统对数据取舍带来的误差,面板、机器人系统以及正向运动学程序计算得出的3组数据基本一致,从而验证了正向运动学解法的正确性。
4.2逆向运动学验证
利用运动学正解中随机关节角度计算出的位姿矩阵,通过逆向运动学求解所有可能的逆解,若逆解中有相应的关节角度,即可验证逆向运动学的正确性。
1)由测试点
(1)的位姿矩阵,求得所有逆解θi
第1组:
[9000°,-9000°,4500°,-9000°,4500°,4500°];第2组:
[9000°,-4690°,-4500°,-4308°,4500°,4500°];第3组:
[9000°,-6381°,0°,10881°,-4500°,-13500°];第4组:
[-5476°,-11971°,0°,2976°,15000°,17032°];第5组:
[-5476°,-11589°,16519°,-17058°,-15000°,-968°];第6组:
[-5476°,-10005°,-16519°,-15339°,-15000°,-968°]。
UR5机器人理论上有8组逆解,本组测试点的所有逆解中有两组解是重复的,去掉后剩余6组解,其中第1组解与机器人实际关节角度一致。
2)由测试点
(2)的位姿矩阵,求得所有逆解θi
第1组:
[4500°,-8733°,6000°,-10767°,6000°,3000°];第2组:
[4500°,-3000°,-6000°,-4500°,6000°,3000°];第3组:
[4500°,-5579°,0°,10079°,-6000°,-15000°];第4组:
[-10679°,-12608°,0°,6243°,13689°,-17928°];第5组:
[-10679°,-14603°,5637°,-15399°,-13689°,072°];第6組:
[-10679°,-9214°,-5637°,-9513°,-13689°,072°]。
去除两组重复解,剩余6组解,可见第2组解与机器人实际关节角度一致。
4.3工程应用验证
在对正向运动学与逆向运动学进行实验验证时,限于篇幅,仅选用了两组测试点,从验证结果来看,可以确定正逆向运动学解析式的正确性。
根据本文UR5机器人运动学算法编制的MATLAB程序在采用UR5为贴标机器人的自动贴标系统中进行了应用,经过工程示范应用检验,能够实现对UR5机器人运动的控制,证明了本文UR5机器人运动学分析的正确性。
5结语
通过分析现有用户建立的UR5机器人坐标系的不足,在UR5机器人结构特点的基础上,采用第2种连杆坐标系建立方式初步建立机器人连杆坐标系,并根据实际的UR5机器人系统数据对所建立的坐标系进行调整,最终建立了与厂家数据匹配的UR5机器人坐标系。
利用与厂家数据匹配的UR5运动学方程编写的程序实现了与机器人系统的相互调用,解决了因坐标系不一致造成用户无法直接利用机器人系统数据进行轨迹规划等工程应用问题。
通过微分法,在运动学的基础上求取了UR5机器人的雅克比矩阵,并通过化简行列式得到了UR5机器人奇异位形的数学表达式并进行了奇异位形的仿真。
本文完成了UR5机器人运动学与奇异位形的理论分析以及MATLAB程序的开发,但还未能依据奇异位形的仿真结果有效避免机器人奇异位形,实现对UR5机器人连续轨迹规划的运动控制,这也是进一步开展UR5机器人连续轨迹规划研究需要克服的问题。
参考文献/References:
[1]谭民,王硕.机器人技术研究进展[J].自动化学报,2013,39(7):
963-972.
TANMin,WANGShuo.Researchprogressonrobotics[J].ActaAutomaticaSinica,2013,39(7):
963-972.
[2]骆敏舟,方健,赵江海.工业机器人的技术发展及其应用[J].机械制造与自动化,2015,44
(1):
1-4.
LUOMinzhou,FANGJian,ZHAOJianghai.Thedevelopmentandtheapplicationoftheindustrialrobottechnology[J].MachineBuilding&Automation,2015,44
(1):
1-4.
[3]计时鸣,黄希欢.工业机器人技术的发展与应用综述[J].机电工程,2015,32
(1):
1-13.
 升级会员
升级会员 