舵令及操舵方法和要领.docx
《舵令及操舵方法和要领.docx》由会员分享,可在线阅读,更多相关《舵令及操舵方法和要领.docx(9页珍藏版)》请在冰豆网上搜索。
舵令及操舵方法和要领
舵令及操舵方法和要领
舵令及操舵基本方法
编者五月风飞
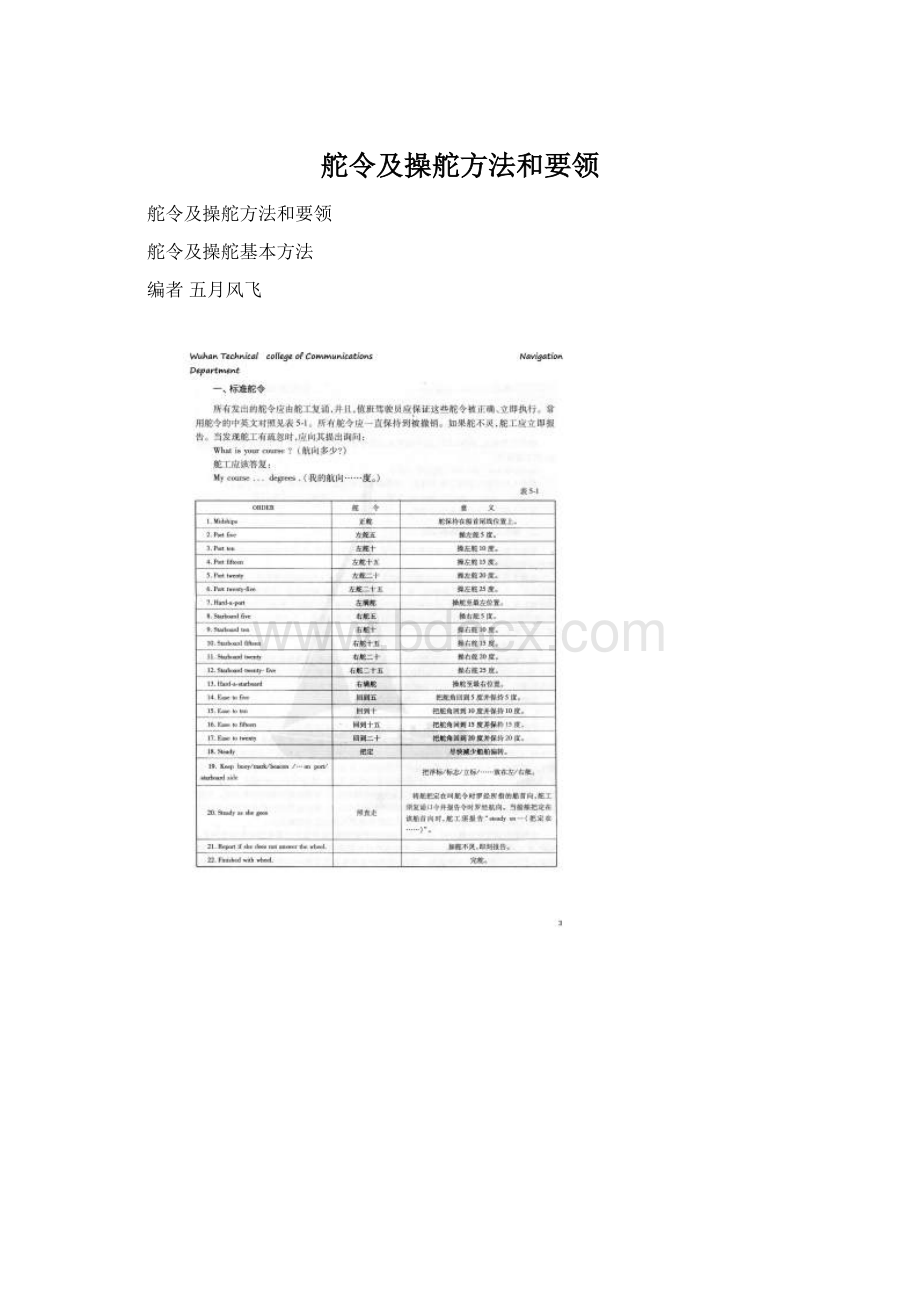
舵令的发令、复述及报告方法见下表:
Order
Reply
Report
发令
复诵
报告
Midship
Midship
Midship
正舵
正舵
正舵
Portfive
Portfive
Wheelisportfive
左舵五
左舵五
五度左
Portten
Portten
Wheelisportten
左舵十
左舵十
十度左
Portfifteen
Portfifteen
Wheelisportfifteen
左舵十五
左舵十五
十五度左
Porttwenty
Porttwenty
Wheelisporttwenty
左舵二十
左舵二十
二十度左
Porttwenty-five
Porttwenty-five
Wheelisporttwenty-five
左舵二十五
左舵二十五
二十五度左
Portthirty
Portthirty
Wheelisportthirty
左舵三十
左舵三十
三十度左
HardaPort
HardaPort
Wheelishardaport
左满舵
左满舵
满舵左
Starboardfive
Starboardfive
Wheelisstarboardfive
右舵五
右舵五
五度右
Starboardten
Starboardten
WheelisStarboardten
右舵十
右舵十
十度右
Starboardfifteen
Starboardfifteen
WheelisStarboardfifteen
右舵十五
右舵十五
十五度右
Starboardtwenty
Starboardtwenty
WheelisStarboardtwenty
右舵二十
右舵二十
二十度右
Starboardtwenty-five
Starboardtwenty-five
WheelisStarboardtwenty-five
右舵二十五
右舵二十五
二十五度右
Starboardthirty
Starboardthirty
WheelisStarboardthirty
右舵三十
右舵三十
三十度右
HardaStarboard
HardaStarboard
Wheelishardastarboard
右满舵
右满舵
满舵右
Easetoten
Easetoten
Wheelisport(starboard)ten
回到十度
回到十度
十度左(右)
Steady(course130)
Steady(course130)
Course130steady
把定(航向130)
把定(航向130)
航向130把定
Nothingtoport(starboard)
Nothingtoport(starboard)
不要偏左(右)
不要偏左(右)
Finishwithwheel
Finishwithwheel
完舵
完舵
Changeoverthewheel,course130,speed13knots,sir.
现在交班,航向130,速度13节,先生.
Takeoverthewheel,course130,speed13knots,sir.
现在接班,航向130,速度13节,先生
Auto—steering自动舵
Handsteering手动舵
NFU(Nonefollowup)应急舵
二、操舵要领和基本方法
操舵工作要领和基本方法船舶在航行中,驾驶人员根据航行的需要,对舵工下达舵令,由舵工根据口令进行操舵,以控制船舶的航行方向。
驾驶人员在下达口令时,应考虑到船舶在各种不同情况下的应舵性能和舵工的操舵水平。
所下达的口令应确切、明了和清楚。
舵工在操舵时应有高度的责任感,思想集中、动作准确、当听到驾驶人员下达舵令后,应立即复诵并执行以防听错。
如遇舵工复诵口令错误或操作不当,驾驶人员应立即加以纠正。
舵工在未听清口令或不理解驾驶人员下达的口令时,可要求重复一遍。
操舵的基本方法为:
1.按舵角操舵
舵工在听到驾驶人员下达舵角口令后,应立即复诵并迅速、准确地把舵轮转到所命令的位置上,注意查看舵角指示器所指示的舵叶实际偏转情况和角度,当舵叶到达所要求的角度时,应及时报告。
在驾驶人员下达新的舵令前,不得任意变动舵的位置。
2.按罗经操舵
船舶在海上航行时,大多按罗经操舵,使其保持在所需的航向上。
当船舶需要改变航向,驾驶人员可直接下达新航向的口令,舵工复诵并将新航向与原航向作比较,从罗经刻度上可清楚地判断出新航向在原航向的哪一边,从而决定采取左舵或右舵。
舵工应根据转向角的大小、本船的旋回性能和海况等情况,决定所用舵角大小。
在一般情况下,如转向角超过30º,可用10º~15º舵角;如转向角小于30º,则宜用5º~10
º舵角。
用舵后船舶开始转向,此时可根据罗经基线和刻度盘的相对转动情况,掌握船舶回转时的角速度。
当船舶逐渐接近新航向时,应根据船舶惯性和回转角速度的大小,按经验提前回舵并可向反方向压一舵角,以防止船舶回转过头,这样船舶就能较快地进入并稳定在新航向上。
在船舶按预定航向航行时,由于受到各种因素的影响,经常会发生偏离预定航向的现象。
为此,舵工应注视罗经刻度盘的动向,发现偏离或有偏离的倾向时,应及时采用小舵角(一般为3º~5º)进行纠偏,以保持航向。
例如,当罗经基线偏在原定航向刻度的左边时,这表示船首已偏到原航向的左边,应操相反方向的小舵角(右舵,3º~5º即可),使船首(罗经基线)返回原航向。
纠偏时要求反应快、用舵快和回舵快。
当发现船首总是固定一侧偏转时(通常是船舶受单侧风浪、潮流或由于积载不当,或由于船型、推进器不对称等恒值干扰力矩的影响所引起),应采用一适当的反向舵角,来消除这种偏转,习惯称为“压舵”。
所用舵角大小,可通过实践的方法来确定,通常先操正舵,查看船着向哪一边偏转,然后操一反向舵角,如所用舵角大小,船首仍将偏向原来的一侧;舵角太大,则反之。
反复调试所采取的舵角,直至能将船首较稳定地保持在预定航向上。
3.按导标操舵
在近岸航行时,特别是在狭水道或进出港时,经常利用船首对准某个导标航行。
舵工
根据驾驶人员所指定的导标,操舵使船首对准该目标,并记下航向度数,报告给驾驶人员。
如发现偏离,立即进行纠正,并注意检查航向有无变化,如有变化,舵工应及时提醒驾驶人员是否存在风流压。
4.大风浪中操舵
由于船舶在大风浪天气下左右前后摇摆颠簸剧烈,航向很难稳定。
此时,应由有经验的人员操舵,应细心观察风流影响的综合结果,要提前回舵或压舵。
为便于指挥或操舵,无论采用哪种操舵方法,驾驶人员或舵工都应掌握船舶在不同受载,不同风浪水流和水深、不同车速等情况下的舵性,熟悉舵设备各开关和旋钮的作用。
三、模拟器上舵的操作
自动舵控制单元
舵控制方式转换
本船舵的操作分为随动舵操作、应急舵操作和自动舵。
1随动舵操作
Ø用舵转换开关将舵的操作转换为随动舵方式(FollowUp)
Ø操作舵轮即可,命令舵角和实际舵角显示在硬件面板的舵角指示区。
2应急舵操作
由于某些船为双舵船,系统提供左、右两个应急舵操作手柄。
若船舶为单舵,右边的应急舵操作手柄有效。
Ø用舵转换开关将舵的操作转换为应急舵方式(NFU、NFUSplit)
Ø操作应急舵操作手柄即可。
当应急舵操作手柄顶部指向Port时为向左转舵,指向Stbd时为向右转舵。
实际舵角显示在中间的显示器(如下图)、驾驶台顶部仪表及舵操作面板上。
3自动舵操作
Ø用舵转换开关将舵的操作转换为自动舵方式(AutoPilot)
Ø航向同步信号选择:
用“Magn/Gyro”可选择船舶实际航向信号是通过电罗经(GyroCompass)输入的,还是通过磁罗经(MagneticCompass)输入的,绿灯亮,表明是电罗经航向同步模式,红灯亮表明是磁罗经航向同步模式
Ø选择是航向控制(CourseControl)还是航迹控制(TrackControl)
Ø设置航向控制时本船的航向
(1)按COURSESET按钮,显示相应的初值
(2)旋转调节选钮,数字显示设置值的大小
(3)按PARASET按钮,航向设置值被确认
Ø设置其它参数
如:
设置Yawing
(4)按Yawing按钮,显示相应的初值
(5)旋转调节选钮,数字显示设置值的大小;按住该旋钮再旋转,调整步长大
(6)按PARASET按钮,设置值被确认
自动舵各参数的含义
1)Yawing:
航摆角
航摆角参数用于调节航向控制器的灵敏度。
值越大,灵敏度越低。
一般情况下,海况恶劣时,设置值较大。
2)Rudder:
舵角数值
舵角数值用于实现航向控制器的等比增益。
值越大,航向改变时的用舵舵角越大。
舵角设置值过大,会导致船舶失衡;过小,船舶转入新航向很慢。
海况恶劣时,设置值较大。
3)CounterRudder:
反舵角数值
反舵角用于克服船舶回转时的惯性,和航向控制器的微分部件有关。
反舵角设置值过大,船舶转入新航向的速度很慢。
过小,会导致船舶失衡。
4)RudderLimit:
设定舵角限制
航向改变时的舵角变化量不会超过此值.
5)OffCourse:
用于设置航向偏离的报警门限
6)Radius:
航迹保持时的参数设置.当船舶偏离计划航线2*RADIUS时,发出偏离航线报警.当船舶在RADIUS~2*RADIUS之间时,进行航迹调整.
7)OffTrack
用于设置航迹控制时,航线偏离的报警门限
8)TrackControl:
用于打开航迹控制,保证船舶沿计划航线运动.当船舶的横向偏差大于一定值时,自动舵产生控制系数进行偏差修整,并确保平均偏差值为零.一般情况下,横向偏差不超过0.3海里,航向偏差不超过30度.
 升级会员
升级会员 