无人机起落架地形自适应系统设计.pdf
《无人机起落架地形自适应系统设计.pdf》由会员分享,可在线阅读,更多相关《无人机起落架地形自适应系统设计.pdf(3页珍藏版)》请在冰豆网上搜索。
2018年22期众创空间科技创新与应用TechnologyInnovationandApplication无人机起落架地形自适应系统设计*张伟哲,卢晓斐,付嘉舜,赵婧宇(中国民航大学航空工程学院,天津300300)1概述现阶段旋翼无人机在起降过程中一般采用垂直起降的飞行方式。
在旋翼无人机的起落过程中,起落架是其重要器件,对它的重量,缓冲能力,安装方式和结构强度都有严格的技术要求,否则会它会对整个起降过程产生不利影响,甚至造成无人机的损伤。
现阶段常见的旋翼无人机起落架结构形式一般为斜倾或带有弧度的垂直杆,并在垂直杆底部接一根与地面平行的直杆,还有则直接采用直杆或斜杆直接与地面接触。
这些结构虽然简单,但性能较差,由于起落架没有良好的减震装置,在较为粗暴的降落过程中,容易造成起落架弯曲变形,产生较大的震动,使之机体侧翻,设备损伤等现象。
现有的旋翼无人机起落架在结构、原理与使用上,显然仍存在有不便与缺陷,而亟待加以进一步改进。
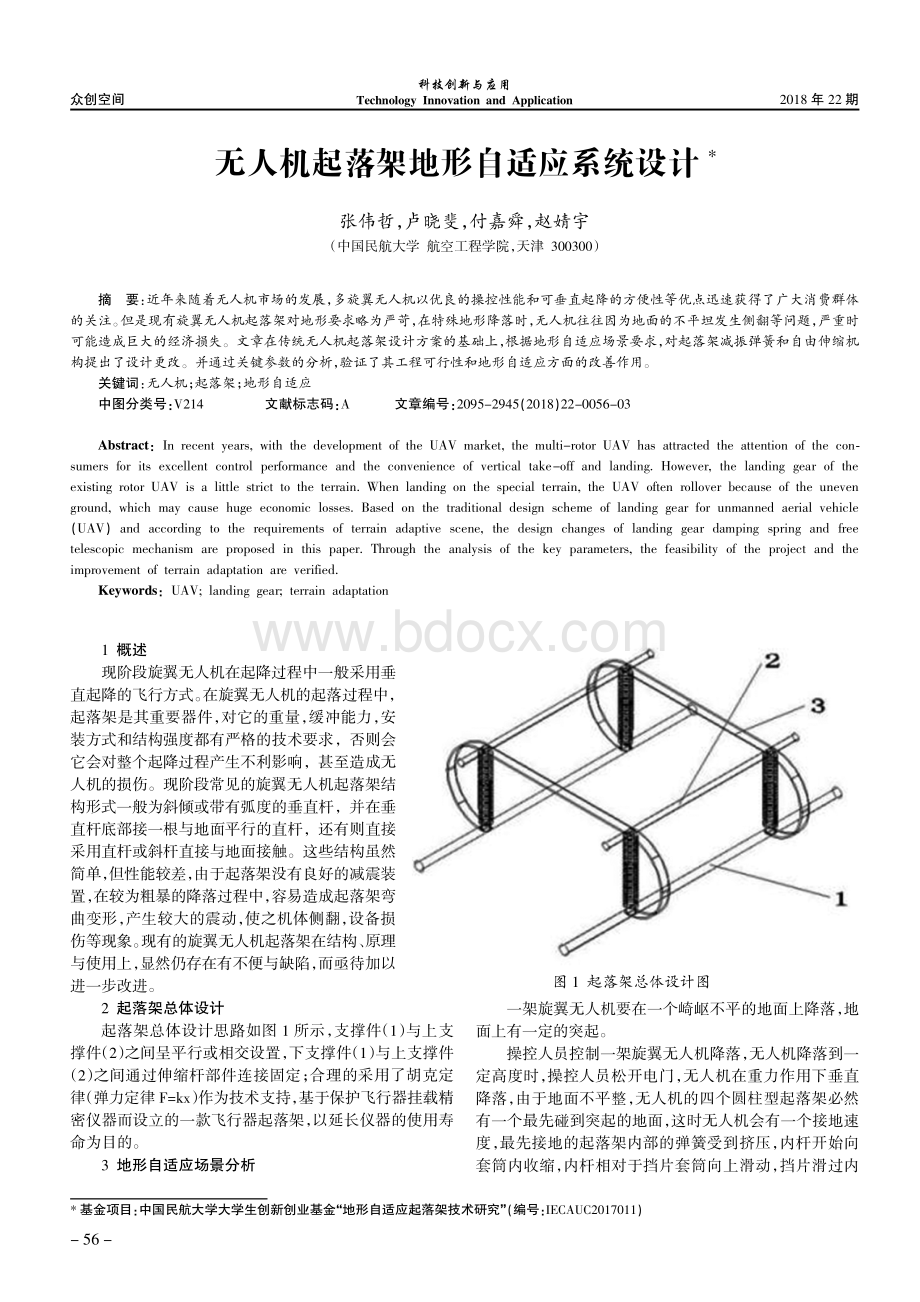
2起落架总体设计起落架总体设计思路如图1所示,支撑件
(1)与上支撑件
(2)之间呈平行或相交设置,下支撑件
(1)与上支撑件
(2)之间通过伸缩杆部件连接固定;合理的采用了胡克定律(弹力定律F=kx)作为技术支持,基于保护飞行器挂载精密仪器而设立的一款飞行器起落架,以延长仪器的使用寿命为目的。
3地形自适应场景分析一架旋翼无人机要在一个崎岖不平的地面上降落,地面上有一定的突起。
操控人员控制一架旋翼无人机降落,无人机降落到一定高度时,操控人员松开电门,无人机在重力作用下垂直降落,由于地面不平整,无人机的四个圆柱型起落架必然有一个最先碰到突起的地面,这时无人机会有一个接地速度,最先接地的起落架内部的弹簧受到挤压,内杆开始向套筒内收缩,内杆相对于挡片套筒向上滑动,挡片滑过内摘要:
近年来随着无人机市场的发展,多旋翼无人机以优良的操控性能和可垂直起降的方便性等优点迅速获得了广大消费群体的关注。
但是现有旋翼无人机起落架对地形要求略为严苛,在特殊地形降落时,无人机往往因为地面的不平坦发生侧翻等问题,严重时可能造成巨大的经济损失。
文章在传统无人机起落架设计方案的基础上,根据地形自适应场景要求,对起落架减振弹簧和自由伸缩机构提出了设计更改。
并通过关键参数的分析,验证了其工程可行性和地形自适应方面的改善作用。
关键词:
无人机;起落架;地形自适应中图分类号院V214文献标志码院A文章编号院2095-2945渊2018冤22-0056-03Abstract院Inrecentyears,withthedevelopmentoftheUAVmarket,themulti-rotorUAVhasattractedtheattentionofthecon鄄sumersforitsexcellentcontrolperformanceandtheconvenienceofverticaltake-offandlanding.However,thelandinggearoftheexistingrotorUAVisalittlestricttotheterrain.Whenlandingonthespecialterrain,theUAVoftenrolloverbecauseoftheunevenground,whichmaycausehugeeconomiclosses.Basedonthetraditionaldesignschemeoflandinggearforunmannedaerialvehicle渊UAV冤andaccordingtotherequirementsofterrainadaptivescene,thedesignchangesoflandinggeardampingspringandfreetelescopicmechanismareproposedinthispaper.Throughtheanalysisofthekeyparameters,thefeasibilityoftheprojectandtheimprovementofterrainadaptationareverified.Keywords院UAV;landinggear;terrainadaptation*基金项目院中国民航大学大学生创新创业基金野地形自适应起落架技术研究冶渊编号院IECAUC2017011冤图1起落架总体设计图56-2018年22期众创空间科技创新与应用TechnologyInnovationandApplication杆上的凸台。
最先接触的起落架有一定收缩量时,其它起落架也相继接触到地面,并像第一根起落架那样收缩。
整个过程中无人机的速度不断的减慢直至停止,而弹簧也在压缩到最大值时由于弹性势能大机体重力,弹簧有伸长的趋势。
由于内杆上有凸台,挡片抵住凸台使内杆不能向下伸出,弹簧不能伸长。
无人机完成降落,静止在地面上,各起落架杆的压缩量会有所不同即弹簧的压缩量有所不同,而无人机落地时的能量储存在弹簧内部,当无人机起飞离地后进行释放。
4地形自适应元件设计旋翼无人机在接地会受到很大的冲击并产生震动,比如不平的地面状况,会使之侧翻,因而可以为起落架加上弹簧缓冲吸收装置,减少着陆时的冲击力,减轻地面不平对降落产生的影响。
该无人机起落架有外筒、带有凸台的内杆、与内杆连接的弹簧及挡片等部件组成。
其结构如图所示。
图示起落架外筒顶部与无人机机身相连,内杆套在外筒内,内杆顶部通过弹簧与外筒连接在一起。
外筒底部有两个瓣膜式的并具有一定厚度的软挡片。
内杆上有若干个锥形凸台,杆底部带有一个可转动的橡胶底座与地面接触。
如图2所示起落架外筒与无人机机身相连,内杆套在外筒内,并通过弹簧与之连接在一起。
外筒底部有两个环形花瓣式并具有一定厚度的钢片。
内杆上有若干个锥形凸台,杆底部带有一个可转动的橡胶底座与地面接触。
5实例验证及可行性分析本文提出的是一种旋翼无人机起落架的设计方法,对于不同型号不同重量的旋翼无人机,其起落架的设计尺寸也会有相应的改变。
本文参照经纬M-600型号六旋翼无人机的机体基本参数进行设计举例及分析,并探究3个问题,起落架支柱是否能满足无人机降落时的强度要求,支柱内部弹簧弹性刚度及凸台的间隔尺寸的合理设计。
经纬M-600是深圳市大疆科技有限公司在2016年在CES上发布的全新一代6旋翼飞行平台。
其部分技术参数如表1所示。
关键参数分析:
为了能够进行计算和分析,本文设定特定情景参数如下:
无人机采用4根垂直起落架支柱,4根支柱按正方形均匀分布,间距为0.8m,支柱材料为碳纤维(通用型弹性模量E=1伊105MPa、抗拉强度滓=1000MPa),内杆直径D1,外筒外径D2,外筒内径d2。
地形情况:
1根起落架支柱先接触与地面相差5cm的突起地面,其他三根支柱同时与地面接触,旋翼无人机降落时的接地速度v=1m/s。
(1)弹簧的弹性系数K无人机质量m=15.6kg,重力P=mg=15.69.8=152.88N,设2-4号支柱的压缩量为x,则1号支柱的压缩量近似为x+0.05,着落的整个过程忽略摩擦消耗。
由能量守恒:
P(x+0.05)+1/2mv2=1/2K(x+0.05)2+31/2Kx2,得K=(305.76x+155.688)/(4x2+0.1x+2.510-3)对于普通的硬性支柱,一根杆先着落时,该杆会受到一个很大的撞击力,该撞击力不仅会使无人机弹起,还会产生一个绕着无人机重心是无人机侧翻的力矩。
该撞击力:
Fd=k驻d=P(1+=152.88(1+=576.4N驻st=P/kk:
降落地面刚度系数取100N/mm。
该撞击力的力矩为:
Md=Fd0.8/2=163.03N/m而在无人机降落过程中,1支柱所受支持力比234支柱的撞击力大驻F=K0.05产生的侧翻力矩为M2=K0.051/20.8由以上可知弹簧的弹性系数越大,侧翻力矩也越大,降落时既不希望弹簧刚度太小使压缩量过大,从而造成结构尺寸过大,也不希望弹簧弹性系数太大使无人机降落不稳定,故取一个合理的弹性系数值,该值可取K=312N/m,则弹簧压缩量x=0.3m,此时M2=8.8N/m。
(2)内杆台阶的间距啄当杆向内收缩,挡片会越过一个个凸台,当挡片越过a.外观图b.剖面图图2地形自适应元件设计图项目类型基本参数重量9.1-9.6kg(由电池选取差异造成)飞行载重6kg最大上升速度5m/s最大下降速度3m/s机身尺寸16681518623(mm)表1经纬M-600技术参数57-2018年22期众创空间科技创新与应用TechnologyInnovationandApplication最后一个凸台后,弹簧继续压缩,挡片继续运动,但未达到下一个凸台,这时,弹簧就会伸张,支柱会有个小的反跳。
考虑到不确定性,假定弹簧伸张的长度为凸台的间距,间距比较小,可近似认为该过程弹簧力不变。
弹簧力为:
Ft1=K(x+0.05)Ft2=Kx由能量原理:
K(x+0.05)啄+3Kx啄=P驻h由此可知驻h随x变化不大,x确定时,啄越大,驻h越大。
台阶的间距太小会使制造过程困难,且凸台强度不够,间距过大会使反跳加大,应取一个合理的间隔,本文取啄=5mm。
(3)支柱强度校核由经纬M-600的尺寸及上述得到的弹簧弹性系数、压缩量,可以确定支柱的外形长度参数,弹簧原长0.45m,外筒长0.55m,内杆长0.4m。
支柱在降落过程中内杆支柱受到挤压,外筒壁受拉。
内杆受压和外筒受拉的力的大小相同,F=K(x+0.05)=312N/m0.35=109.2N细长杆临界力的欧拉公式:
F=仔2EI/L2惯性矩I=仔D14/64得D1逸0.00436m,取D1=1cm内杆上有台阶,取套筒内径d2=2.2cm,取套筒外径D2=3cm滓=F/(仔/4(D22-d22)臆滓取安全系数1.5,外筒满足强度要求。
碳纤维的密度为1.8g/cm3,预计弹簧质量加凸台质量与单一内杆质量相同。
整个旋翼无人机起落架的质量为m=4(21/4仔D1240+1/4仔(D22-d22)55)1.8=1746.2g=1.746.2kg6结束语本文通过对典型无人机起落架地形自适应装置的研究,提出了起落架的设计更改方案,并进行场景设计、数据分析、合理性检验,对弹簧弹性系数、撞击力、侧翻力矩、强度校核、起落架尺寸等方面进行计算和检验。
最终得出此减震装置在规定的接地速度等的范围内,是可以在实际中使用的,并通过三维建模等方式确定了该实验的可靠性。
新型起落架有以下三点优势:
(1)在崎岖地面可完成稳定降落;
(2)对起落架结构起到减震保护作用;(3)结构简单,质量较轻。
参考文献院1单辉祖.材料力学(第4版)M.高等教育出版社.2美约翰贝克托.无人机DIYM.人民邮电出版社.3崔胜民.轻松玩转多旋翼无人机M.化学工业出版社.在溶液质量分数相同的情况下,较低的提拉速度制得的薄膜厚度较小,且薄膜厚度更为均匀;以较高的提拉速度所制的薄膜,厚度沿着提拉方向逐渐减小,即最先离开溶液的位置厚度较小,最后离开溶液的位置厚度较大,均匀性较差。
同时,也可发现,当提拉速度高于0.743cm/s时,厚度增加的幅度减缓。
图3为试验2所制薄膜厚度的测试结果,可以看出,薄膜厚度及均匀性与提拉速度的变化趋势与试验1所得结果近似。
图4为试验3所制薄膜厚度的测试结果,可以发现,在提拉速度相同的情况下,较低溶液质量分数制得的薄膜厚度较小且更为均匀。
3结束语利用实验室自制提拉机,以不同制膜溶液浓度及提拉速度制备了PEK-C树脂薄膜,薄膜厚度随着制膜溶液浓度及提拉速度的增大而增大,且分散性增大,在较低的速度区间(0.259cm/s0.789cm/s)及较低的溶度范围(6%11%),分散性较小,可用作制膜。
参考文献院1OdagiriN,KishiH,NakaeH.T800H/3900-2toughenedepoxyprepregsystem:
TougheningconceptandmechanismC.Proc.ofthe6thConf.oftheAmericanSocietyforCompositesC,NewYoke:
AmericaSocietyforComposite,1991:
43-52.2益小苏,许亚洪,等.航空树脂基复合材料的高韧性化研究进展J.科技导报,2008,26(6):
84-92.YiXiaosu,XuYahong,etal.Developmentofstudiesonpoly原mermatrixaircraftcompositematerialshighlytoughenedJ.Sci原ence驭TechnologyReview,2008,26(6):
84-92.3NamGyunYun,YongGuWon,SungChulKim.Tougheningofcarbonfiber/epoxycompositebyinsertingpolysulfonefilmtoformmorphologyspectrumJ.Polymer,2004,45(20):
6953-6958.4ChenYan,LinJie,WanYuqin,etal.PreparationandbloodcompatibilityofelectrospunPLA/curcumincompositemembranesJ.FibersandPolymers,2012,13(10):
1254-1258.渊上接55页冤58-
 升级会员
升级会员 