机械原理答案第十一章.docx
《机械原理答案第十一章.docx》由会员分享,可在线阅读,更多相关《机械原理答案第十一章.docx(23页珍藏版)》请在冰豆网上搜索。
机械原理答案第十一章
第十一章齿轮系及其设计
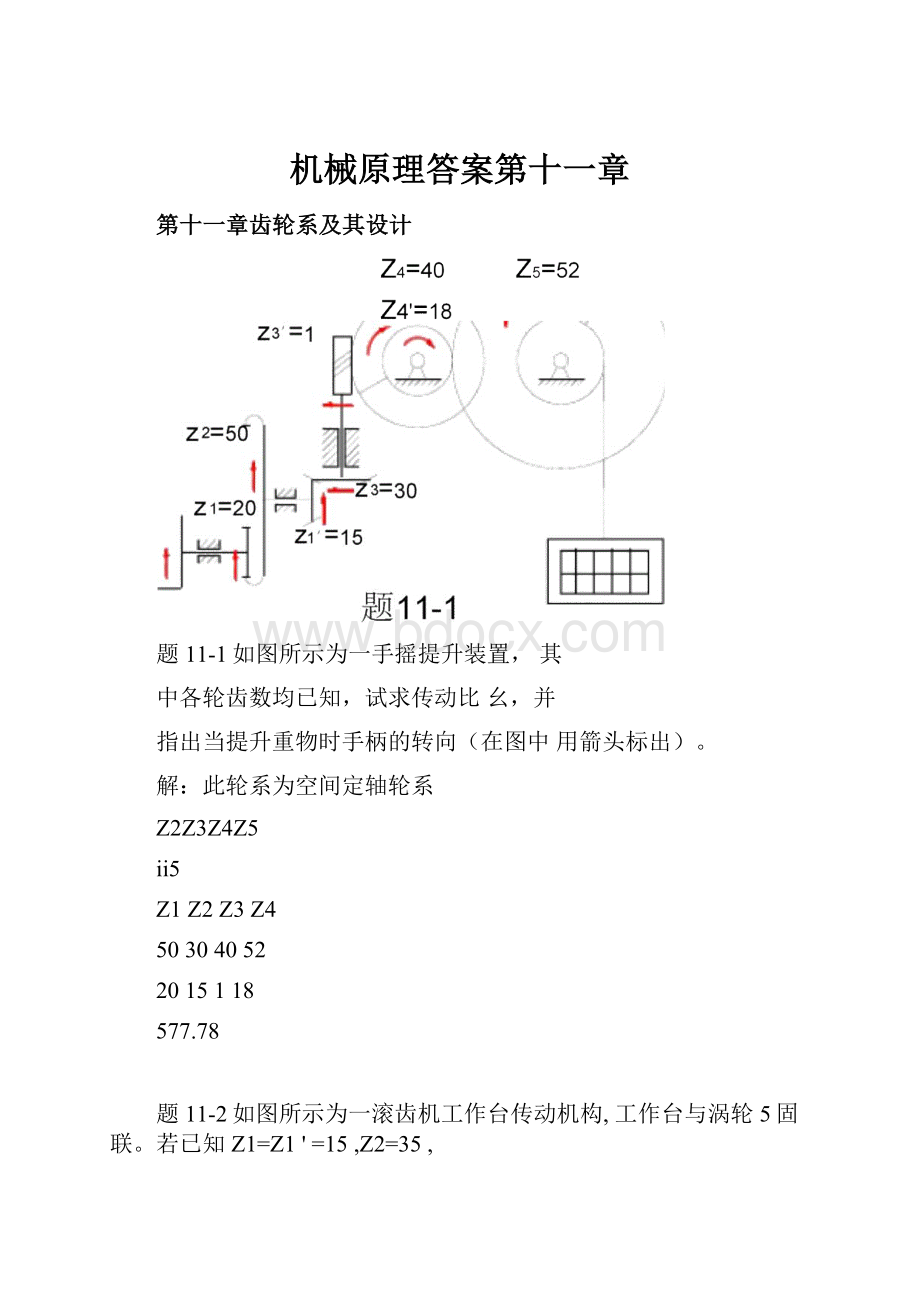
题11-1如图所示为一手摇提升装置,其
中各轮齿数均已知,试求传动比幺,并
指出当提升重物时手柄的转向(在图中用箭头标出)。
解:
此轮系为空间定轴轮系
Z2Z3Z4Z5
ii5
Z1Z2Z3Z4
50304052
2015118
577.78
题11-2如图所示为一滚齿机工作台传动机构,工作台与涡轮5固联。
若已知Z1=Z1'=15,Z2=35,
Z4'=1(右旋),Z5=40,滚刀Z6=1(左旋),Z7=28。
今要切制一个齿数Z5‘=64的齿轮,应如
何选配挂轮组的齿数Z2‘、Z3和Z4。
解:
由范成原理,滚刀
6与轮坯5'的角速度比应为
・6
i65
64转向如图。
5
Z6
这一角速度比由滚齿机工作台的传动系统来保证。
iZ1Z2Z4Z5
i15
Z7NZ2Z4
153540z4
28151z2
50鱼
Z2
i65转向如图
z32
可求得二35至于Z3为惰轮,其齿数可根据中心距A24的需要确定。
JTL
r6-i
5'
1
J
5
T4
口一-344^1
2'
题11-3如图所示为一千分表的示意图。
己知各轮齿数如图,模数m0.11mm(为非标准
模数)。
若要测量杆1每移动0.001mm时,指针尖端刚好移动一个刻度s1.5mm。
问指
针的长度R?
(图中齿轮5和游丝的作用是使各工作齿轮始终保持单侧接触,以消除齿轮
间隙对测量精度的影响)
再由轮2与测量杆组成齿轮与齿条传动知
测杆1每移动0.001mm时,齿轮2的转角为:
此时要求指针刚好移动一刻度s1.5mm,由sR4可得指针的长度为
题11-4如图所示为绕线机的计数器。
图中1为单头蜗杆,其一端装手把,另一端装被绕制线圈。
2、3为两个窄蜗轮,Z2=99,Z3=100。
在计数器中有两个刻度盘,在固定刻度盘的一
固定刻度盘
活动鋼度盘
周上有100个刻度,在与蜗轮2固联的活
动刻度盘的一周上有99个刻度,指针与
蜗轮3固联。
问指针在固定刻度盘上和活
线圈己绕制了多少
动刻度盘上每一格读数各代表绕制线圈的匝数是多少?
又在图示情况下,
匝?
解:
1)固定刻度盘上读数
因i1321仝100
匕Zi
故n3ni100即蜗杆每转一转,蜗轮3转过1100转,指针相对固定刻度盘转过一个刻度,固定刻度盘的一周上有100个刻度,说明指针在固定刻度盘上的每一格读数代表被绕制线圈绕了一匝。
2)活动刻度盘上读数
99个刻度,故指针在活动刻度盘上的每一格读数代表被绕制线圈己绕制了
9900
99
100匝。
,所以线圈己绕制
3)今指针在活动刻度盘上读数为13.,在固定刻度盘上读数为5.
的匝数为:
1305匝
活动刻度盘上的度数100固定刻度盘上的度数131005
题11-5图a、b所示为两个不同的圆锥齿轮周转轮系,已知z120,z224,z230,
z340,n1200r..min,n3100rmin。
求两轮系nH
解:
1)图a:
差动轮系
iHn1nH
i13
gnH
Z2Z3
Z1Z2
◎1.6
2030
nH
遏nn1.6100200
hH11.61
600r.min
2)图b:
差动轮系
.H
i13
n1nH
Z2Z3
1.6
n3nH
Z1Z2
nH
.H
i13n3n1
.HA
i131
1.6100200
1.61
15.385rmin
根据上述汁算结果,
请回答下列问题:
1.在周转轮系的转化轮系中构件的转向是由
画箭头方法确定的,而在周转轮系中构件
的转向是由周转轮系传动比计算公式的结果
确定的。
2.在图a中,表示构件1、3转向的箭头方向相同,
而题中给定n1与n3的方向相反,这不
矛盾吗?
答:
不矛盾。
因为图中箭头所示为构件在
转化轮系中
的转向,而不是构件在
实际周转轮系中
的转向。
由计算n1H
n1
nH800rmin(图a);
H
n1
n1
nH184.615rmin(图b)
H
n3n3
nH
500r.min(图a)n3
n3
nH
115.385rmin(图b)
可见,在图
a中nJ与n3d同向,与图中箭头所示方向
相同:
在图
b中nJ与n{反向,与图中箭头所示方向
相同;
3)由演算结果可见,若转化轮系传动比的“”判断错误,不仅会影响到周转轮系
传动比大小,还会影响到周转轮系中构件转向。
题11-6图示为纺织机中的差动轮系,设Z1=30,Z2=25,
Z3=Z4=24,Z5=18,Z6=121,m=48~200r/min,nH=316r/min,求
n6=?
解:
此差动轮系的转化轮系的传动比为:
.H
n1
nH
i16
ns
nH
1
ne〒n1nH
i16
Z2Z4Z6
Z1Z3Z5
互H5.6
302418
nHn148~200时
卷线齿轮
n6
48
316
5.6
316〜丄200316
5.6
316268.14〜295.29
n6与n1及nH
转向相同。
题11-7图示为手动起重葫芦,已知Zi=z2‘=10,Z2=2O,Z3=4O,
传动总效率=0.9,为提升重G=10kN的重物,求必须施加于
链轮A上的圆周力F。
解:
此轮系为行星轮系
14
Z2Z3彳
2040c
i14
1i131
1
9
4
Z2Z2
1010
4MQ
40Q
因为
1MP
160Pi14
rQ
10000
所以
P
308.64
4i14
40.99
故提升10000N的重物,必需施加于链轮
A上的园周力P为308.64N。
题11-8图示为建筑用铰车的行星齿轮减速器。
已知
n1=1450r/min。
当制动器B制动,A放松时,
轮H静止,齿轮7空转),求nH。
解:
制动B时为行星轮系
Hh
1i
H11
1711
1Z2Z4Z6Z7
Z1Z3Z5Z6
1
39
39152
45.44
17
1718
nH
n1
1450
31.91
i1H
45.44
Z1=z3=17,Z2=Z4=39,Z5=18,Z7=152,
题11-9在图示的电动三爪卡盘转动轮系中,
设已知各轮齿数为Z1=6,Z2=Z2‘=25,Z3=57,z4=56,
试求传动比皿。
解:
区分轮系:
123H为行星轮系、4223
H为行星轮系。
1223H为差动轮系。
而只有两个轮系是独立的,为
求解简单,选两个行星轮系求解。
123H为行星轮系
r—n
"J
Yr
么
H
1
F77I
HZ3”
i1H1i1311
Z1
57
6
10.5
4224H为行星轮系
i1iH1
14H43
1
25
57
1
Z4Z2
56
25
56
i14虹10.556
588
n1与n4转向相反。
i4H
题11-10如图所示为一装配用电动螺丝刀齿轮减速部分的传动简图。
已知各轮齿数为Z1=Z4=7,
试求螺丝刀的转速。
Z3=Z6=39,若n1=3000r/min,
H1行星轮系中
i1H1
Z3
39
H2行星轮系中
i4H2
i462
Z6
39
i1H2
i1H1
i4H2
故nH2
n1
3000
i1h2
43.18
题11-11在图示的复合轮系中,
Z4‘=49,Z5=31,Z6=131
Z4
r
5
3.
H-
H
■
7
L
f)
婢莹刀
O
139
69.5
43.18
转向与n1相同。
设已知n1=3549r/min,又各轮齿数为
Z7=94,Z8=36,Z9=167,试求行星架
解:
该复合轮系由1、2(3)、4定轴轮系和
4567行星轮系及789H行星轮
系组成。
1、2(3)、4定轴轮系中
Z1=36,Z2=60,Z3=23,Z4=49,
H的转速nH(大小及转向)
114
Z2Z4
6049
3.551
Z1Z3
3623
45
67行星轮系中
/-7
“Z6
131
147
1146
1——
1-
乙
69
78
9H行星轮系中
H
“Z9
‘167
I7H
1I79
1—
1-
Z7
94
|伯
I14I4
7I7H
3.551
n〔
3549
nH
124.15
I1H
28.587
2.899
2.777
2.8992.77728.587
转向与n4相同。
题11-12在图示的轮系中,设各轮的模数均相同,且为标准传动,若已知齿数Z1=Z2‘=Z3‘=Z6‘=20,Z2=Z4=Z6=Z7=40,试问:
1)当把齿轮1作为原动件时,该机构是否具有确定的运动?
2)齿轮3、5的齿数应如何确定?
3)当齿轮1的转速n1=980r/min时,齿轮3及齿轮5的
运动情况如何?
解:
1•计算机构自由度
n7pi7ph8虚约束p2局部自由度F0
F3n(2plphp)F37(2782)01
因此机构有确定的相对运动。
2•确定齿数:
根据同心条件,可得
z3z1z2z220402080
z5z32z420240100
3.计算齿轮3、5的转速:
1)图示轮系为封闭轮系,在作运动分析时应划分为如下两部分来计算。
2)在12235差动轮系中,有如下计算式
.5门1门5Z2Z3
1」
4050
Qz、
i13
(a)
nsn5Z1Z2
2020
3)在345定轴轮系中,有如下计算式
4)l联立式(a)\(b),得
n5n1499804920rmin
n35n5520
100
故n3100nmin其转向与
n1反向;n5
20nmin其转向与
n1同向。
题11-13在图示的2K-H型轮系中,已知中心轮1的齿数z156,行星轮的内齿圈2的齿
解:
1)确定轮3齿数
Z3Z2Z2
Zi60
88
56
92
2)确定传动比
H
i1HI113
Z2Z3
1
Z1Z2
型空0.1201
5688
iH11i1H
8.3243
3)确定转化轮系效率
HHH
131223
0.982
0.9604
4)确定轮系效率
1
11iH1
1—1厂O'3
5)确定输出功率
H1Ph0.73
85.84
题11-14现需设计
2K-H行星减速器,要求的减速比为
5.33,设行星轮数k=4,并采用标准
齿轮传动,试确定各轮的齿数。
解:
1.确定行星轮系类型:
决定采用图示的单排行星轮系,因为1)该行星轮系的传动比范围能
满足设计要求;2)该行星轮系为负号机构,有较高的传动效率。
H
i1H1i13
1Z3
乙
z3
即丄
Z1
i1H
14.33
由安装条件
Z1Z3
N即
Z1
1生
Z5.33N
K
K
Z1
4
2.确定各轮齿数:
由传动比条件
4N
5.33
15.01,18.01,21.01,4.02,27.02
取z124
Z.
?
Z1
4.33,
Z3
103.92
,取Z3
104
由同心条件
Z2
1
2
Z3Z1
1
2
10424
40
故z124
Z2
40
Z3
104
3检查
Z3
104
5.3333
1)传动比误差
:
I1H1
1-
误差很小,允许。
Z1
24
Zi
2)邻接条件:
Z1
Z22ha
即45.2542,故合适。
.180z2sin
K
Z220,Z360
inin
题11-15在图示的轮系中,轮1与电动机轴相联n;1440r.min,z1
Z490,Z5210,求n3
庭示:
本轮系为一个装载式复合轮系.整个轮系装载在构件3上*随之一道运动,在解题时,给整个轮系一介{・心)转速绕OO轴线回转.江意观療转化后的轮系为何种鲨系”进而貳可获毎解题思38。
W设各槿:
件的转洙仪方向如图所示,若给整个轮系一个(F“绕OO轴线转动’构件3就转化成为蛊疋柩件。
此旳.名构件的轶遠变为相对于构件$的转18*该鸵系为一复合轮系,并由两部分绢成:
乾1・2■芥H药化为普通行星轮系.
有如尸亠昭)⑶
轮4、5转化为定轴轮系,
=為-场210
育h'=
忒坷-叫^49
由于n,=llH9«;=0,
故上式可得到:
-4=^,4=-^(b)
叫9090
朕解式@)及(b)•得:
90«90x1440,一“zz・、
n3二一=一=15429(r/nnn)
4x2104x210
轮3与电动机的转向相反c
 升级会员
升级会员 