ABB机器人外部启动配置说明.docx
《ABB机器人外部启动配置说明.docx》由会员分享,可在线阅读,更多相关《ABB机器人外部启动配置说明.docx(22页珍藏版)》请在冰豆网上搜索。
ABB机器人外部启动配置说明
ABB机器人外部启动配置说明
一、外部IO板的配置
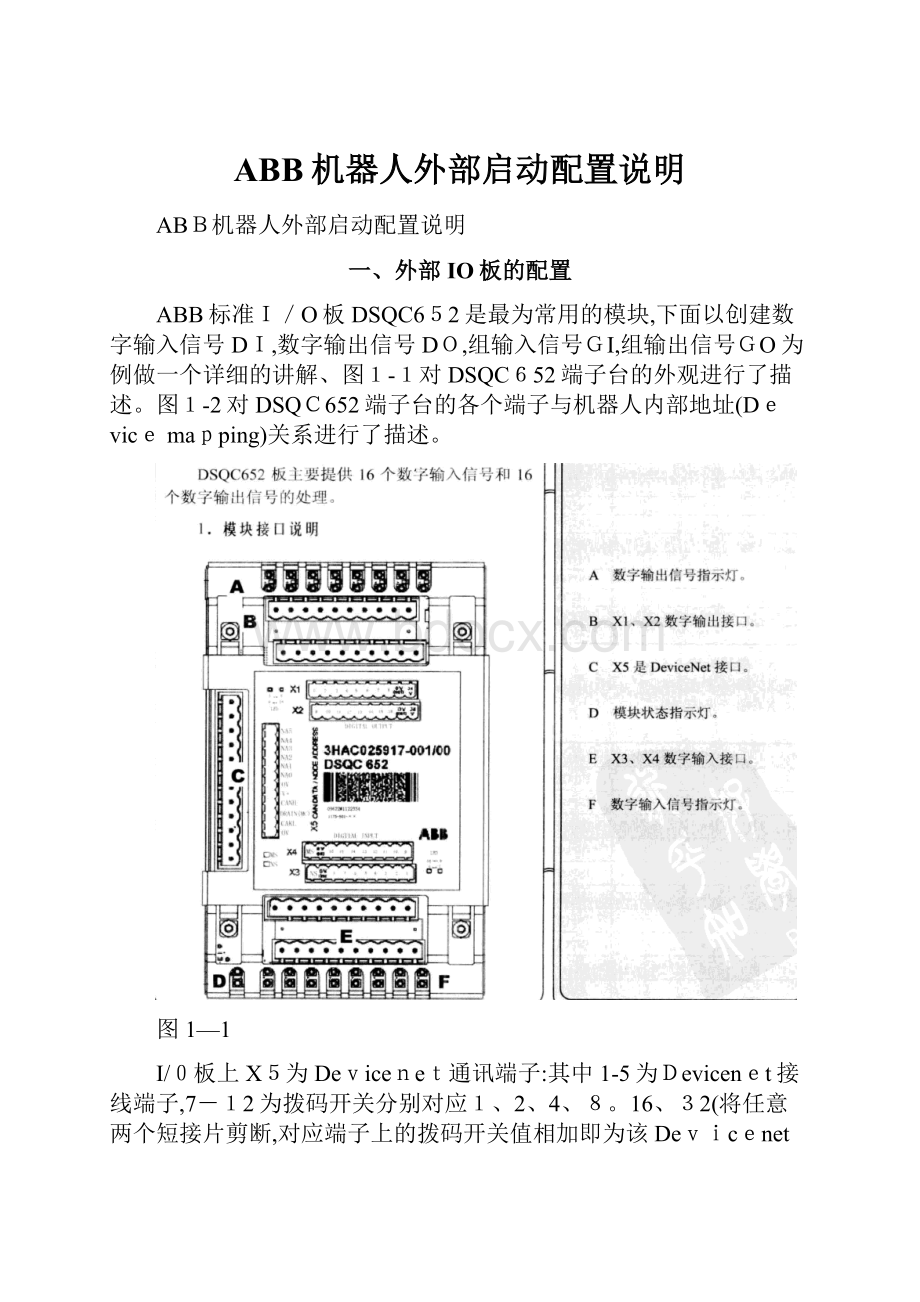
ABB标准I/O板DSQC652是最为常用的模块,下面以创建数字输入信号DI,数字输出信号DO,组输入信号GI,组输出信号GO为例做一个详细的讲解、图1-1对DSQC652端子台的外观进行了描述。
图1-2对DSQC652端子台的各个端子与机器人内部地址(Devicemapping)关系进行了描述。
图1—1
I/0板上X5为Devicenet通讯端子:
其中1-5为Devicenet接线端子,7-12为拨码开关分别对应1、2、4、8。
16、32(将任意两个短接片剪断,对应端子上的拨码开关值相加即为该Devicenet地址,例如此处将8和10端子短接片剪短,对应的拨码开关值分别为2和8,因此2+8=10,此Devicenet地址为10)。
图1-2
1、定义DSQC652板的总线连接
ABB标准I/O板都是下挂在DeviceNet现场总线下的设备,通过X5端口与DeviceNet现场总线进行通讯。
定义DSQC652板的总线连接相关参数说明见表1-1-1
表1—1—1
参数名称
设定值
说明
Name
d652
设定IO板在系统中的名字
Address
10
设定IO板在总线中的地址
来自模板的值
DSQC 65224VDCI/ODevice
选择DeviceNet设备
单击【ABB菜单】→【控制面板】→【配置】→【DeviceNetDevice】→【添加】显示图1-1—1所示的界面
图1-1-1
单击“使用来自模板的值”行的下拉菜单,选择“DSQC65224VDCI/ODevice”,如图1-1—2所示
图1-1-2
点击【向下】按钮,找到参数名称Address,将值改成10。
单击【确定】,完成DSQC652板的总线连接。
提示“重启"选择【是】。
如图1—1—3所示
图1—1-3
2、创建数字输入信号DI1
单击【ABB菜单】→【控制面板】→【配置】→【Signal】→【添加】显示图1—2-1所示的界面,数字输入信号DI1相关参数说明见表1-2-1
表1-2-1
参数名称
设定值
说明
Name
DI1
设定数字输入信号的名字
TypeofSignal
DigitalInput
设定信号的类型
Assignedto Device
DSQC65224VDCI/ODevice
设定信号所在的IO模块
DeviceMapping
1
设定信号所占用的地址
InvertPhysicalValue
NO
假如想将信号取反,可选Yes
图1—2—1
依照表1-2—1设定,设定完毕后如图1-2—2所示,单击【确定】,提示“重启”选择【是】,完成数字输入信号DI1的创建。
图1—2-2
3、创建数字输出信号DO1
单击【ABB菜单】→【控制面板】→【配置】→【Signal】→【添加】显示图1-2-1所示的界面,数字输出信号DO1相关参数说明见表1-3-1
表1—3-1
参数名称
设定值
说明
Name
DO1
设定数字输出信号的名字
Typeof Signal
DigitalOutput
设定信号的类型
AssignedtoDevice
DSQC65224 VDCI/ODevice
设定信号所在的IO模块
DeviceMapping
1
设定信号所占用的地址
InvertPhysicalValue
NO
假如想将信号取反,可选Yes
依照表1—3—1设定,设定完毕后如图1—3-1所示,单击【确定】,提示“重启”选择【是】,完成数字输出信号DO1的创建。
图1-3-1
4、创建组输入信号GI1
单击【ABB菜单】→【控制面板】→【配置】→【Signal】→【添加】显示图1—2—1所示的界面,组输入信号GI1相关参数说明见表1—4-1
表1—4-1
参数名称
设定值
说明
Name
GI1
设定组输入信号的名字
Typeof Signal
GroupInput
设定信号的类型
AssignedtoDevice
DSQC65224 VDC I/ODevice
设定信号所在的IO模块
DeviceMapping
1,2,4-3
设定信号所占用的地址
Invert Physical Value
NO
假如想将信号取反,可选Yes
依照表1-4-1设定,设定完毕后如图1-4-1所示,单击【确定】,提示“重启”选择【是】,完成组输入信号GI1的创建、
图1—4-1
5、创建组输出信号GO1
单击【ABB菜单】→【控制面板】→【配置】→【Signal】→【添加】显示图1-2-1所示的界面,组输入信号GO1相关参数说明见表1—5-1
表1—5-1
参数名称
设定值
说明
Name
GO1
设定组输出信号的名字
TypeofSignal
Group Output
设定信号的类型
AssignedtoDevice
DSQC652 24VDCI/O Device
设定信号所在的IO模块
Device Mapping
1,2,4-3
设定信号所占用的地址
Invert PhysicalValue
NO
假如想将信号取反,可选Yes
依照表1-5-1设定,设定完毕后如图1-5—1所示,单击【确定】,提示“重启”选择【是】,完成组输出信号GO1的创建、
图1—5-1
组输入与组输出遵循以下格式:
注意:
组输入和组输出能够定义起始位,能够隔位,各个位的顺序和设置的一致,如1,5-3,7和1,3—5,7是不一样的。
6、关联外部IO信号与系统变量
此处以输入信号为例,将IN1信号关联到“Motor on”,单击【ABB菜单】→【控制面板】→【配置】→【SystemInput】→【添加】显示图1—6-1所示的界面,相关参数说明见表1-6—1
表1—6-1
参数名称
设定值
说明
SignalName
IN1
设定输入端信号的名称
Action
Motoron
设定输入信号IN1有效时的动作
图1—6-1
依照表1—6-1设定,设定完毕后如图1—6-2所示,单击【确定】,提示“重启”选择【是】,完成输入信号与系统变量的关联。
图1-6—2
依照此方法将IN2信号关联到“START”。
“Motoron"、“START”配置完成,机器人便可外部启动、
二、利用608-1worldzone软件包设置待机位置和干涉区
待机位置的输出端必须设置成只读模式(ReadOnly)。
worldzone监控的是当前TCP的坐标值。
单击【ABB菜单】→【控制面板】→【配置】→【Signal】→【添加】,其他参数名称设置参照“创建数字输出信号DO1",AccessLevel设置参照如图2—1-1所示
图2—1-1
创建如图2—1-2所示的程序,程序名为POWER_UP(此程序要在EventRoute中调用)、单击【ABB菜单】→【控制面板】→【配置】→【主题】→【Controller】,显示如图2-1—3所示的界面,单击Event Route,按图2-1—4所示要求填写,单击【确定】,提示“重启”选择【是】。
设置完毕后。
机器人在开机后都会调用一次POWER_UP程序,告诉机器人干涉区或者机器人的待机位置,假如在设定的范围内,便会输出。
图2-1-2
图2-1—3
图2—1-4
三、MAIN程序的编辑
详见附件
四、程序和IO配置的导出与导入
程序文件和IO配置能够导出到USB设备,需要指出的是:
路径中不能包含中文
程序文件的导出与导入见下图:
IO配置的导出与导入见下图:
 升级会员
升级会员 