牛头刨床问题分析文档格式.docx
《牛头刨床问题分析文档格式.docx》由会员分享,可在线阅读,更多相关《牛头刨床问题分析文档格式.docx(14页珍藏版)》请在冰豆网上搜索。
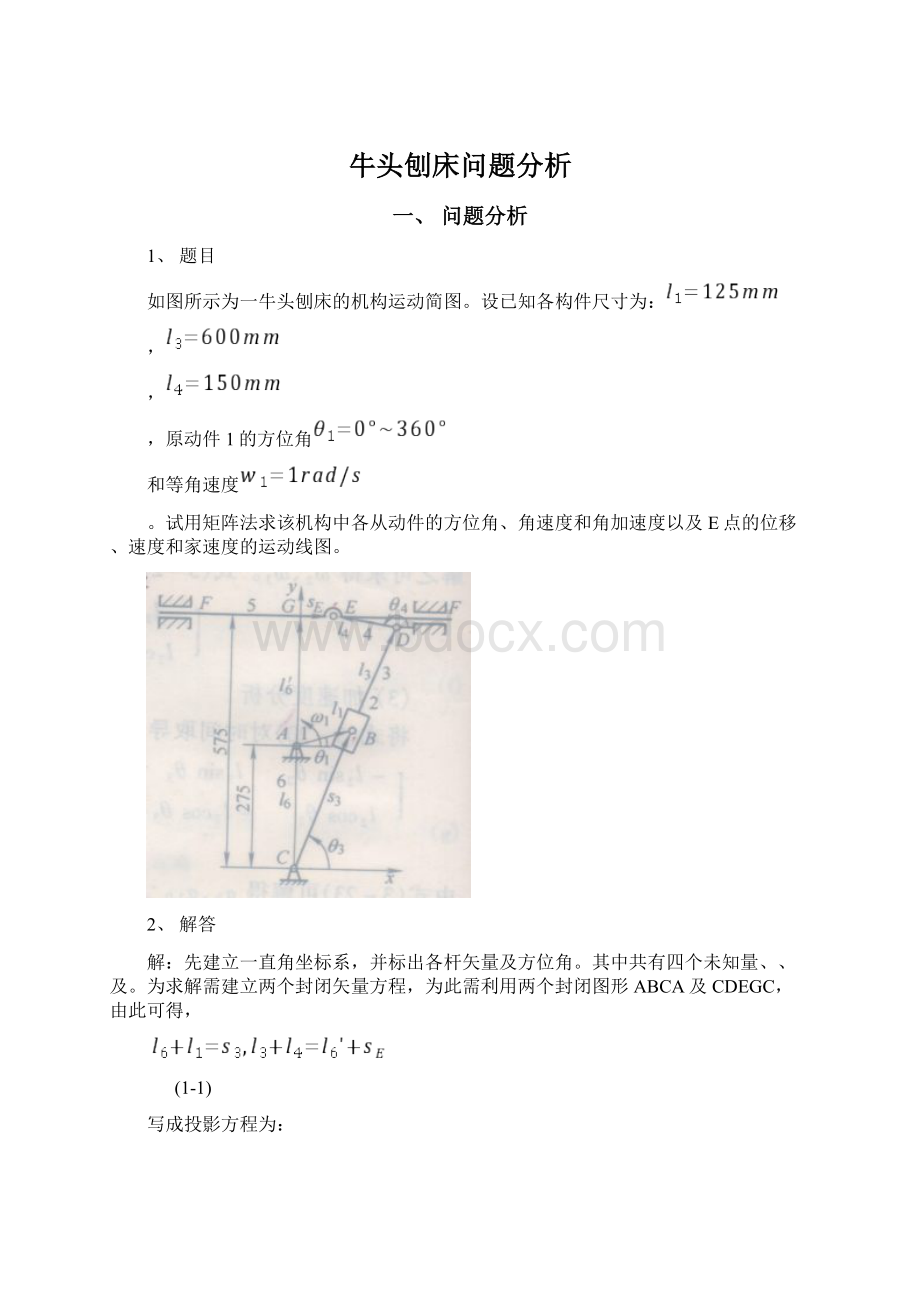
写成投影方程为:
(1-2)
解上面方程组,即可求得、、及四个位置参数,其中
将上列各式对时间取一次、二次导数,并写成矩阵形式,即可得以下速度和加速度方程式。
速度方程式:
(1-3)
机构从动件的位置参数矩阵:
机构从动件的的速度列阵:
机构原动件的位置参数矩阵:
:
机构原动件的角速度
加速度方程式:
(1-4)
机构从动件的位置参数矩阵求导:
机构从动件的的加速度列阵:
机构原动件的位置参数矩阵求导:
二、Matlab编程思路
1、采用解析法画图采用matlab软件进行操作画图。
2、牛头刨床三维
3、程序框图
三、程序及程序说明
clearall;
%清除缓存空间
w1=1;
%等角速度
l1=0.125;
l3=0.6;
%构件中有注明
l6=0.275;
l61=0.575;
%代表l6’
l4=0.15;
%图中有标出
form=1:
3601
th1(m)=pi*(m-1)/1800;
th31(m)=atan((l6+l1*sin(th1(m)))/(l1*cos(th1(m))));
ifth31(m)>
=0
th3(m)=th31(m);
elseth3(m)=pi+th31(m);
end;
s3(m)=(l1*cos(th1(m)))/cos(th3(m));
th4(m)=pi-asin((l61-l3*sin(th3(m)))/l4);
t(m)=(l61-l3*sin(th3(m)))/l4;
se(m)=l3*cos(th3(m))+l4*cos(th4(m));
ifth1(m)==pi/2
th3(m)=pi/2;
s3(m)=l1+l6;
end
ifth1(m)==3*pi/2
s3(m)=l6-l1;
A1=[cos(th3(m)),-s3(m)*sin(th3(m)),0,0;
...
sin(th3(m)),s3(m)*cos(th3(m)),0,0;
0,-l3*sin(th3(m)),-l4*sin(th4(m)),-1;
0,l3*cos(th3(m)),l4*cos(th4(m)),0];
B1=w1*[-l1*sin(th1(m));
l1*cos(th1(m));
0;
0];
D1=A1\B1;
E1(:
m)=D1;
ds(m)=D1
(1);
w3(m)=D1
(2);
w4(m)=D1(3);
ve(m)=D1(4);
A2=[cos(th3(m)),-s3(m)*sin(th3(m)),0,0;
sin(th3(m)),s3(m)*cos(th3(m)),0,0;
0,-l3*sin(th3(m)),-l4*sin(th4(m)),-1;
0,l3*cos(th3(m)),l4*cos(th4(m)),0];
B2=-[-w3(m)*sin(th3(m)),(-ds(m)*sin(th3(m))-s3(m)*w3(m)*cos(th3(m))),0,0;
w3(m)*cos(th3(m)),(ds(m)*cos(th3(m))-s3(m)*w3(m)*sin(th3(m))),0,0;
0,-l3*w3(m)*cos(th3(m)),-l4*w4(m)*cos(th4(m)),0;
0,-l3*w3(m)*sin(th3(m)),-l4*w4(m)*sin(th4(m)),0]*[ds(m);
w3(m);
w4(m);
ve(m)];
C2=w1*[-l1*w1*cos(th1(m));
-l1*w1*sin(th1(m));
B=B2+C2;
D2=A2\B;
E2(:
m)=D2;
dds(m)=D2
(1);
a3(m)=D2
(2);
a4(m)=D2(3);
ae(m)=D2(4);
o11=th1*180/pi;
y=[th3*180/pi;
th4*180/pi];
w=[w3;
w4];
a=[a3;
a4];
figure;
subplot(221);
h1=plotyy(o11,y,o11,se);
axisequal;
title(‘位置曲线'
);
xlabel('
\it\theta1'
ylabel('
\it\theta3,\theta4,Se'
d=legend('
\it\theta3'
'
\it\theta4'
\itSe'
set(d,'
box'
off'
subplot(222);
h2=plotyy(o11,w,o11,ve);
title('
速度曲线'
\it\omega3,\omega4,Ve'
b=legend('
\it\omega3'
\it\omega4'
\itVe'
set(b,'
subplot(212);
h3=plotyy(o11,a,o11,ae);
加速度曲线'
\it\alpha3,\alpha4,\alphaE'
c=legend('
\it\alpha3'
\it\alpha4'
\it\alphaE'
set(c,'
F=[o11;
th3./pi*180;
th4./pi*180;
se;
w3;
w4;
ve;
a3;
a4;
ae]'
;
G=F(1:
100:
3601,:
)
%计算结果输出
四、运行结果
1、位置曲线、速度曲线、加速度曲线
2、在同一个图中绘制位置曲线、速度曲线、加速度曲线
3、数据输出
五、心得体会
通过本次作业,加深了我对解析法的理解,通过学习MATLAB编程,初步了解了其强大功能,在以后的一些学习中我会继续该软件的学习。
同时在做本次作业的过程中遇到了很多问题,主要是因为软件刚学,对解析法的理解不够好,通过上网查阅、请教同学,最后完成本次任务。
在做作业的时候不但学习到了书本上的知识,同时也学到了一些生活的道理。
总而言之,这次作业对我的影响比较大,有助于我以后的学习。
 升级会员
升级会员 