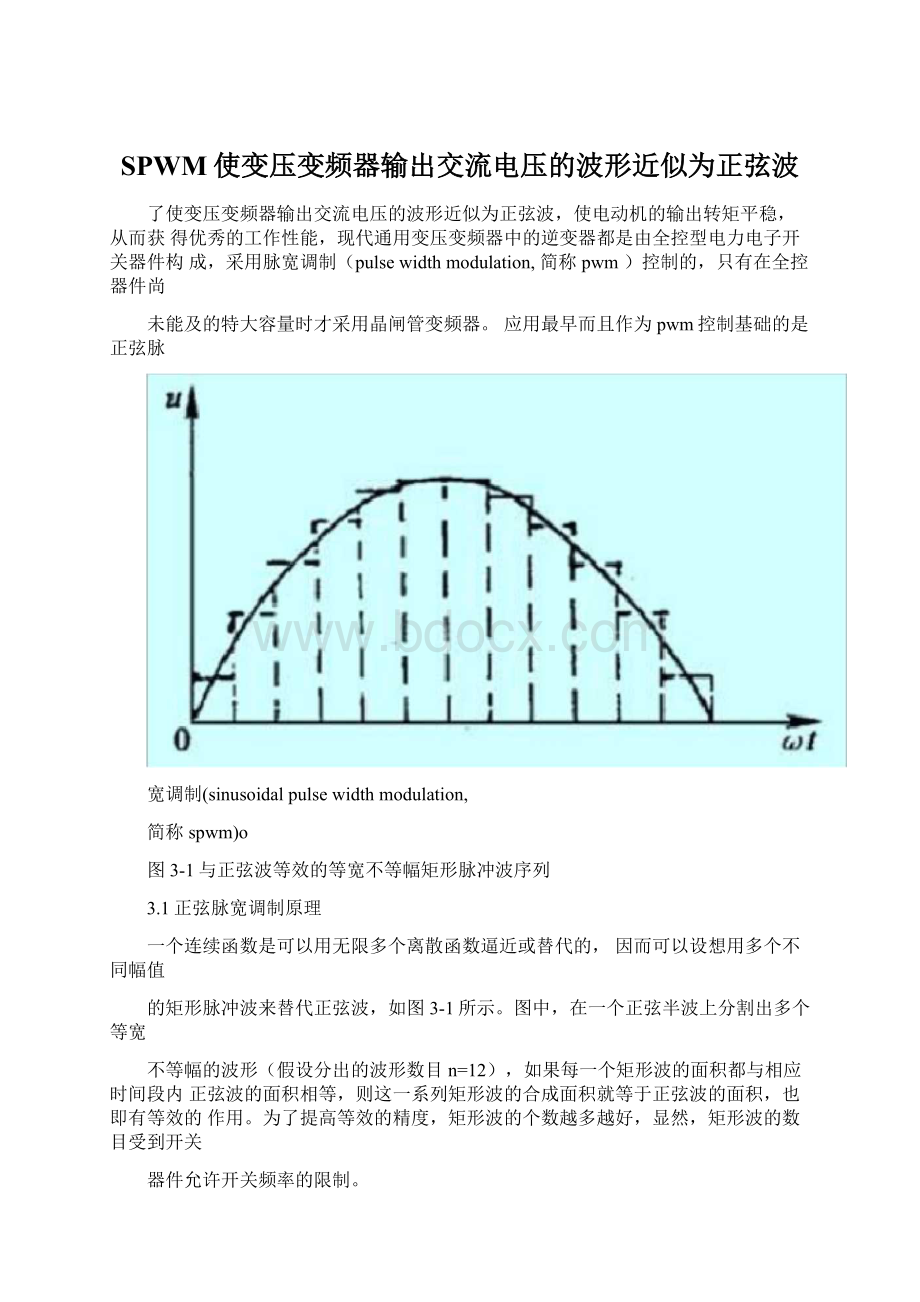
SPWM使变压变频器输出交流电压的波形近似为正弦波Word文档格式.docx
《SPWM使变压变频器输出交流电压的波形近似为正弦波Word文档格式.docx》由会员分享,可在线阅读,更多相关《SPWM使变压变频器输出交流电压的波形近似为正弦波Word文档格式.docx(19页珍藏版)》请在冰豆网上搜索。
u高于载波电压u时,使开关器件travt导通,输出正的脉冲电压(见图3-4b);
当u低于
U时,使Vt关断,输出iralt电压下降为零。
在U的负半周中,可用类似的方法控制下桥
臂的Vt,输出负4ra2/16
的脉冲电压序列。
若改变调制波的频率,输出电压基波的频率也随之改变;
降低调制波的幅值时,如图中的,各段脉冲宽度变窄,输出电压的基波幅值也相应减小。
a)正弦调制波与三角载波
b)输出的spwm波
图3-4单极式脉宽调制波的形成
上述单极式spwm波形在半周内的脉冲电压只在“正”(或“负”)和“零”之间变化,
主电路每相只有一个开关器件反复通断。
如果让同一桥臂上、下两个开关器件互补地导通与关断,则输出脉冲在“正”和“负”之间变化,就得到双极式的spwm波形。
图3-5
绘出了三相双极式正弦脉宽调制波形,其调制方法和单极式相似,只是输出脉冲电压的
极性不同。
当a相调制波u>
u时,vt导通,itravt关断,节点a与直流电源中点o'
间的相电压为u'
=+u/2(图3-5b);
当u<
ra4aodu时,vt关断而vt导通,则u'
=—u/2。
所以a相电压u'
=f(t)是以+U/2da0td1a04和—山2为幅值作正、负跳变的脉冲波形。
同理,图3-5C
的u'
=f(t)是由vt3db0和vt交替导通得到的,图3-5d的u'
=f(t)是由vt5和vt2交替导通得到的。
C06由u'
和u'
相减,可得逆变器输出的线电压u=f(t)(图3-5e),也就是负载
abaObO上的线电压,其脉冲幅值为+ud和一ud。
可见,线电压的spwm波是由土u和0d三种
电平构成的
3/16
图3-5三相桥式pwm逆变器的双极性spwm波形图5-20中的u'
、u'
与u'
是逆变器输出端a、b、c分别与直流电源中点o'
论“之间的电压,o'
点与负载的零点o并不一定是等电位的,u'
等并不代表负载上ao的相电压。
令负载零点o与直流电源中点o'
之间的电压为u'
,贝V负载各相的oo相电压分别为
NAO-ttAOi~NOOfI
HqoRfgJig'
I
(3-1)
将式(3-1)中各式相加并整理后得
~^AOCO—+町。
+昇CO)
4/16
ifOO~AO十"
占O十"
uo
一般负载三相对称,则U+U+U=0,故有coboaoJ
(3-2)
1,
lfAO~ifAO_7'
O十“BO+“8)
由此可求得a相负载电压为3
(3-3)
在图3-5f中绘出了相应的负载a相电压波形,u和u波形与此相似。
8b。
3.2spwm波的基波电压
对电动机来说,有用的是电压的基波,希望spwm波形中基波的成分越大越好。
为了找出基波电压,须将spwm脉冲序列波u(t)展开成傅氏级数,由于各相电压正、负半波及其左、右均对称,它是一个奇次正弦周期函数,其一般表达式为
00
住=13工…)
式中
U血二二intIsmko^tcHo^t)
nJo
(3-4)
要把包含n个矩形脉冲的u(t)代入上式,必须先求得每个脉冲的起始相位和终了相位。
在图3-5中,由于在原点处三角波是从负的顶点开始出现的,所以第i个脉冲中心点的
7T17T2?
-1
ti.=■一i=7T
相位应为X一"
1"
(3-5)
于是,第i个脉冲的起始相位为
5
/16
终了相位为
(3-7)
以k=1代入式(3-7),可得输出电压的基波幅值。
当半个周期内的脉冲数n不太少时,
各脉冲的宽度3都不大,可以近似地认为sin3/2/2,因此iii
瓦
2
一(3-8)
可见输出基波电压幅值U与各段脉宽3有着直接的关系,它说明调节参考信i1m号的幅值
从而改变各个脉冲的宽度时,就可实现对逆变器输出电压基波幅值的平滑调节。
根据脉冲与相关段正弦波面积相等的等效原则可以导出
£
2nUm・门
c\心SU1优
匸TTJt
(3-9)
6/16
将式(3-5)、式(3-9)代入式(3-8),得
(3-10)
2U,
1仝心12^
n胃-n
可以证明,除n=1以外,有限项三角级数
讪⑴一山
:
In
莎4“
1=1
而n=1是没有意义的,因此由式(3-10)可得
u=umim也就是说,spwm逆变器输出脉冲波序列的基波电压正是调制时所要求的正弦波幅值电压。
当然,这个结论是在作出前述的近似条件下得到的,即n不太少,sinnI2n〜
n/2n,且sinS/2i/2。
当这些条件成立时,spwm变压变频器“能很好地满足异步电动机变压变频调速的要求。
要注意到,spwm逆变器输出相电压的基波和常规六拍阶梯波的交-直-交变压变频器相比
要小一些,据有关资料介绍,仅为其86%90%这样就影响了电机额定~电压的充分利用。
为了弥补这个不足,在spwm逆变器的直流回路中常并联相当大的滤波电容,以抬高逆变器的直流电源电压u。
d3.3脉宽调制的制约条件
根据脉宽调制的特点,逆变器主电路的功率开关器件在其输出电压半周内要开关n次。
如果把期望的正弦波分段越多,则n越大,脉冲波序列的脉宽S越小,i上述分析结论
的准确性越高,spwm波的基波就更接近期望的正弦波。
但是,功率开关器件本身的开关能力是有限的,因此,在应用脉宽调制技术时必然要受到一定条件的制约,这主要表现在以下两个方面。
3.3.1功率开关器件的开关频率
各种电力电子器件的开关频率受到其固有的开关时间和开关损耗的限制,全控型器件常
用的开关频率如下:
双极型电力晶体管(bjt)开关频率可达15khz,可~关断晶闸管(gto)开关频率为12khz,功率场效应管(p-mosfet)开关频率可达~7/16
50khz,而目前最常用的绝缘栅双极晶体管(igbt)开关频率为5〜20khz。
定义载波频率f与参考调制波频率f之比为载波比n(carrierratio),即“
"
(3-11)
相对于前述spwm波形半个周期内的脉冲数n来说,应有n=2n。
为了使逆变器的输出尽量接近正弦波,应尽可能增大载波比,但若从功率开关器件本身的允许开关频率来看,载波比又不能太大。
n值应受到下列条件的制约:
(3-12)
式(3-12)中的分母实际上就是spwm变频器的最高输出频率。
3.3.2最小间歇时间与调制度
为保证主电路开关器件的安全工作,必须使调制的脉冲波有个最小脉宽与最小间歇的限
制,以保证最小脉冲宽度大于开关器件的导通时间t,而最小脉冲间歇大于器件的关
断时间t。
在脉宽调制时,若n为偶数,调制信号的幅值Urmoff与三角载波相交的两点恰好是一个脉冲的间歇。
为了保证最小间歇时间大于t,必须使U低于三角载波的峰值U。
(3-13)
在理想情况下,m值可在01之间变化,以调节逆变器输出电压的大小。
实际上,巾总是
小于1的,在n较大时,一般取最高的m=0.80.9。
~3.4同步调制与异步调制
在实行spwm时,视载波比n的变化与否,有同步调制与异步调制之分。
3.4.1同步调制
在同步调制方式中,n=常数,变频时三角载波的频率与正弦调制波的频率同步改变,因而输出电压半波内的矩形脉冲数是固定不变的。
如果取n等于3的倍数,则同步调制
能保证输出波形的正、负半波始终对称,并能严格保证三相输出波形间具有互差120°
的对称关系。
但是,当输出频率很低时,由于相邻两脉冲间的间距增大,谐波会显著增加,使负载电动机产生较大脉动转矩和较强的噪声,这是同步调制方式的主要缺点。
3.4.2异步调制
为了消除同步调制的缺点,可以采用异步调制方式。
顾名思义,异步调制时,在变压变频器的整个变频范围内,载波比n不等于常数。
一般在改变调制波频率fr时保持三角
载波频率ft不变,因而提高了低频时的载波比。
这样输出电压半波内的矩形脉冲数可随输出频率的降低而增加,从而减少负载电动机的转矩脉动与噪声,改善了系统的低频工作性能。
8/16
有一利必有一弊,异步调制方式在改善低频工作性能的同时,又失去了同步调制的优点。
当载波比n随着输出频率的降低而连续变化时,它不可能总是3的倍数,势必使输出电压波形及其相位都发生变化,难以保持三相输出的对称性,可能引起电动机工作的不平
稳。
343分段同步调制
为了扬长避短,可将同步调制和异步调制结合起来,成为分段同步调制方式,实用的spwm
变压变频器多采用这种方式。
在一定频率范围内采用同步调制,可保持输出波形对称的优点,但频率降低较多时,如果仍保持载波比n不变,输出电压谐波将会增大。
为了避免这个缺点,可以采纳异步调制的长处,使载波比分段有级地加大,这就是分段同步调制方式。
具体地说,把整个变频范围划分成若干频段,在每个频段内都维持载波比n恒定,而对不同的频段取不同的n值,频率低时,n值取大些,一般大致按等比级数安排。
表3-1给出了一个系统的频
段和载波比的分配,以资参考。
图3-6所示是与表3-1相应的f与f的关系曲线。
由图可见,在输出频率"
t的不同频段内用不同的n值进行同步调制,使各频段开关频率的变化范围基本一致,以适应功率
开关器件对开关频率的限制
图3-6分段同步调制时输出频率与开关频率的关系曲线
上述图表的设计计算方法如下:
已知变频器要求的输出频率范围为560hz,用~igbt作开
关器件,取最大开关频率为5.5khz左右,最小开关频率在最大开关9/16
取n为3的整数倍数,则n=90,修正后,1
兀喉“⑺哄=9°
6MX血0压
血=丛=3720JJz=41.33HZ
,计算后得若取旺%
取整数,则f=41hz,f=41X90=3690hz。
以下各段依此类推,可得表3-1血讪“中各行的数据。
分段同步调制虽然比较麻烦,但在微电子技术迅速发展的今天,这种调制方式是很容易
实现的。
3.5spwm控制方法
采用高开关频率的全控型电力电子器件组成逆变电路时,先假定器件的开与关均无延时,
于是可将要求变频器输出三相spwm波的问题转化为如何获得与其形状相同的三相spwm
控制信号问题,用这些信号作为变频器中各电力电子器件的基极(栅极)驱动信号。
原始的spwm是由模拟控制实现的。
图3-7是spwm变压变频器的模拟控制电路框图。
三相对称的参考正弦电压调制信号U、U、U由参考信号发生器提供,rcrarb其频率和幅值都
可调。
三角载波信号ut由三角波发生器提供,各相共用。
它分别与每相调制信号进行比较,给出“正”的饱和输出或"
零”输出,产生spwm脉冲波序列u、U、U,作为变
压变频器功率开关器件的驱动信号。
spwm的模dcdadb拟控制现在已很少应用,但它的原理
仍是其它控制方法的基础。
10/16
图3-7spwm变压变频器的模拟控制电路
目前常用的spwm控制方法是数字控制。
可以采用微机存储预先计算好的spwm波形数据
表格,控制时根据指令调出;
或者通过软件实时生成spwm波形;
也可以采用大规模集
成电路专用芯片中产生的spwm信号。
下面介绍几种常用的方法。
3.5.1自然采样法
完全按照模拟控制的方法,计算正弦调制波与三角载波的交点,从而求出相应的脉宽和脉冲间歇时刻,生成spwm波形,称为自然采样法(naturalsampling),如图3-8所示。
在图中截取了任意一段正弦调制波与三角载波的相交情况。
交点a是发出脉冲的时刻,
b点是结束脉冲的时刻。
图3-7spwm变压变频器的模拟控制电路t为三角载波的周期;
t
为在t时间段内在脉冲发生以前(即a点cd以前)的间歇时间;
t为ab之间的脉宽时间;
t为在t时间段以内b点以后的C23间歇时间。
显然,t=t+t+t。
321c
图3-8生成spwm波形的自然采样法
若以单位1代表三角载波的幅值U,则正弦调制波的幅值U就表示调制度mrmtm正弦调
制波可写作u=msin®
t
1r式中,3是调制频率,也就是变压变频器的输出频率1由于a、b两点对三角载波的中
心线并不对称,须把脉宽时间t分成t'
和t'
'
222两部分(见图3-8)。
按相似直角三角形的几何关系,可知
11/16
2_1+A/sin
V2=乙
21+Msina\fs
经整理得
1+羊(sin卯a卡sill)
(3-14)
这是一个超越方程,其中t、t与载波比n、调制度m都有关系,求解困难,ba而且t工t,分别计算更增加了困难。
因此,自然采样法虽能确切反映正弦脉31宽调制的原始方法,
计算结果正确,却不适于微机实时控制。
3.5.2规则采样法
自然采样法的关键问题是,spwm波形每一个脉冲的起始和终了时刻t和t对三ba角波的
中心线不对称,因而求解困难。
工程上实用的方法要求算法简单,只要误差不大,允许作一些近似处理。
这样就提出了各种规则采样法(regular
sampling)。
规则采样法的出发点是设法在三角载波的特定时刻处确定正弦调制波的采样电压值,使
脉冲的起始和终了时刻对称,这样就比较容易计算求出对应于每一个spwm波的采样时
刻。
图3-9所示是一种规则采样法,以三角载波的负峰值(e点)作为采样时刻,对应的
采样电压为U。
在三角载波上由U水平线截得a、b两rere点,以此确定了脉宽时间t。
由于在两个三角载波波形正峰值之间的时刻即为2t,因此a点、b点与载波各正峰值的
间隔时间分别为t和t,且t=t,而相3C311应的spwm波形相对于t的中间时刻(载波负峰值对应的时刻)对称,这就大大简c化了计算。
需要指出的是,上述规则采样法所得spwm波形的起始时刻、终了时刻以及脉宽大小都不如自然采样法准确,脉冲起始时刻a点比自然采样法提前了,终了时刻b点也提前了,虽然两者提前的时间不尽相同,但终究相互之间有了一些补偿,对脉冲宽度的影响不大,所造成的误差是工程上能够允许的,毕竟规则采样法的算法简单多了。
由图3-9可以看出,规则采样法的实质是用阶梯波来代
替正弦波(图中粗实线所示),从而简化了算法。
只要载波比足够大,不同的阶梯波都很逼近正弦波,所造成的误差可以忽略不计。
12/16
图3-9生成spwm波的一种规则采样法
在规则采样法中,三角载波每个周期的采样时刻都是确定的,都在负峰值处,不必作图就可计算出相应时刻的正弦波值。
例如采样值应依次为msin31,eimsin(3t+t),
msin(3t+2t),,因而脉宽时间和间歇时间都可以很沁仏容易计算出来。
由图3-9
可得规则采样法的计算公式:
T
f1Q
脉宽时间-
(3-15)
间歇时间
(3-16)
实用的变频器多是三相的,因此还应形成三相的spwm波形。
三相正弦调制波在时间上
互差2n/3,而三角载波是共用的,这样就可在同一个三角载波周期内13/16
获得图3-10所示的三相spwm脉冲波形。
在图中,每相的脉宽时间t、t和b2a2tc2都可
用式(3-15)计算,求三相脉宽时间的总和时,等式右边第一项相同,加起来是其三倍,
第二项之和则为零,因此
(3-17)
图3-10三相spwm波形的生成
14/16
三相间歇时间总和为
丄十Si+4十G+h十4V—(J+hi亠口)二石匚
jm+4=g十號十「3-;
几
脉冲两侧的间歇时间相等,所以
(3-18)
式中,下角标a、b、c分别表示a、b、c三相。
在数字控制中,一般可以离线先在计算机上算出不同宀与m时的脉宽时间t21
—Msui
—或后,写入eprom,然后由调速系统的微机通过查表和加减法运
算求出各相脉宽时间和间歇时间,这就是查表法。
也可以在内存中存储正弦函数和t/2
值,控制时,先取出正弦值与调速系统所需的调制度m作乘法c运算,再根据给定的载
波频率取出对应的t/2值,与msin®
t作乘法运算,机然后运用加、减、移位即可算出脉宽时间t2和间歇时间t、t,此即实时计算31法。
按查表法或实时计算法所得的脉冲数据都送入定时器,利用定时中断向接口电路送出相应的高、低电平,以实时产生spwm
波形的一系列脉冲。
对于开环控制系统,在某一给定转速下其调制度m与频率宀都有确
定值,所以宜采用查1表法。
对于闭环控制的调速系统,在系统运行中调制度m值须随
时被反馈控制调节,所以用实时计算法更为宜。
3.5.3spwm专用集成电路芯片与微处理器
应用单片微机产生spwm波形时,其效果受到指令功能、运算速度、存储容量和兼顾其它控制算法功能的限制,有时难以有很好的实时性。
特别是在高频电力电子器件的应用以及在闭环调速系统中,完全依靠软件生成spwm波形的方法实际上很难适应其要求。
随着微电子技术的发展,早期曾陆续开发了一些专门用于发生spwm控制信号的集成电
路芯片,如mullard公司的hef4752、philips公司的mkii、siemens公司的sle4520、sanken公司的mb63h11Q以及我国研制的zps-110等,应用这类专用芯片当然比用单片微机生成spwm信号要方便得多。
近来更出现了多种用于电动机调速控制的专用单片
微处理器,如intel公司的8xc196mc系列、tl公司的tms320系列、日立公司的sh7000系列等。
这些微处理器一般都具有以下功能:
(1)有pwm波形生成硬件及较宽的调频调制范围;
(2)为了对变频器及所组成调速系统的运行参数(如电压、电流、转速等)进行
实时检测与故障保护,微处理器具有很强的中断功能与较多的中断通道;
(3)具有将外
部的模拟量控制信号及通过各种传感器送来的模拟反馈、检测信号进行a/d转换的接口,
且一般为8位转换器;
(4)具有较高的运算速度、能完成复杂运算的指令、内存容量较大;
(5)有用于外围通信的同步、异步串行接口的硬件或软件单元。
15/16
由于这些功能的支持,所以上述微处理器能方便地用于开发基于pwm控制技术的电动机
调速系统,微处理器除能产生可调频率的pwm控制信号外,还能完成必需的保护、控制
等功能。
现代spwm变频器的控制电路大都是以微处理器为核心的数字控制电路。
16/16
 升级会员
升级会员 