SEW伺服程序编辑步骤文档格式.docx
《SEW伺服程序编辑步骤文档格式.docx》由会员分享,可在线阅读,更多相关《SEW伺服程序编辑步骤文档格式.docx(10页珍藏版)》请在冰豆网上搜索。
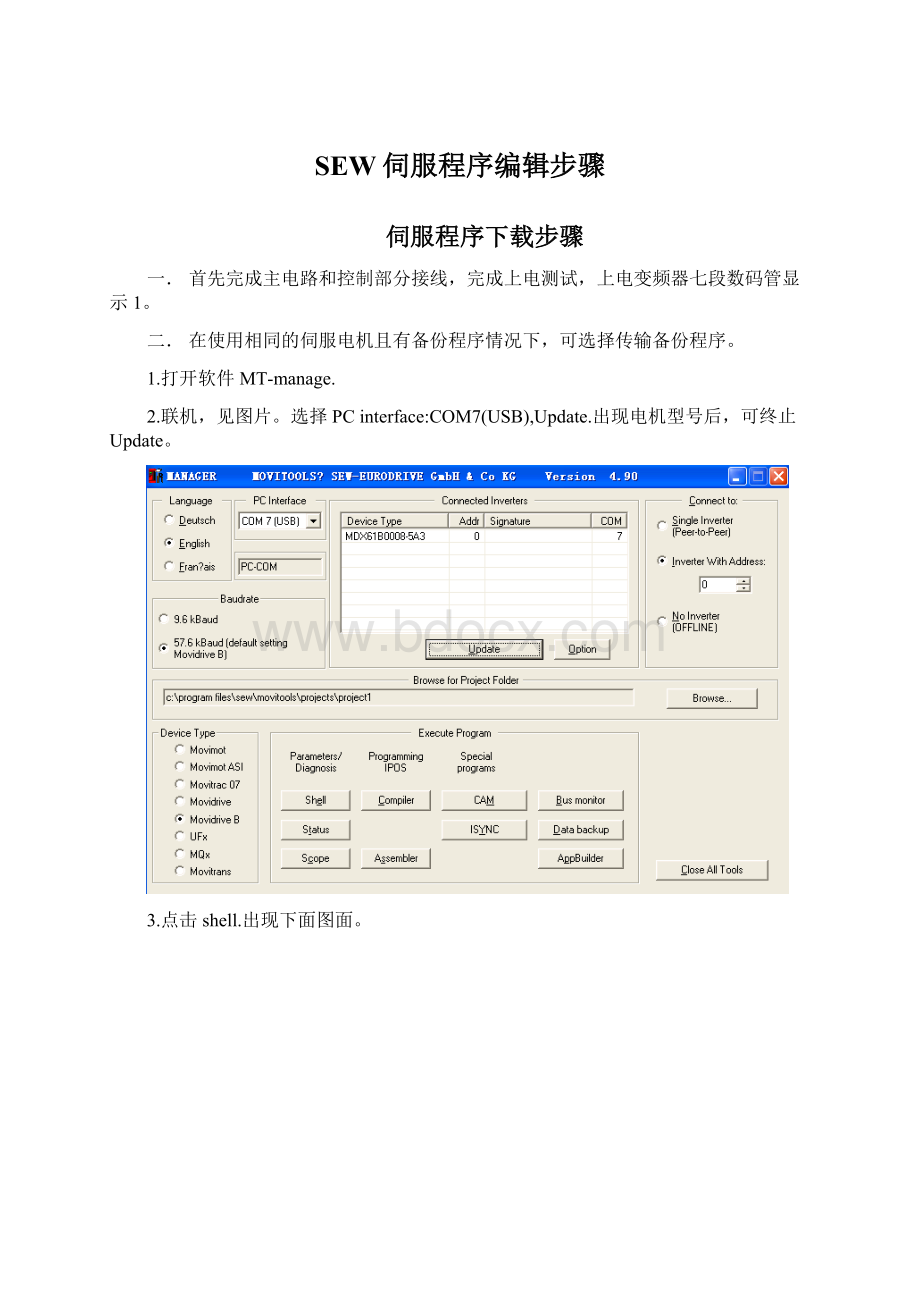
1.打开软件MT-manage.
2.联机,见图片。
选择PCinterface:
COM7(USB),Update.出现电机型号后,可终止Update。
3.点击shell.出现下面图面。
4.选择copyunitdata,出现下面画面。
在上面from…选择我们的备份程序,在下面to…选择inverter.然后点击start按钮。
5.程序传输完成后,启动程序(start)或点击闪电图标。
三.没有备份程序,可进行初始化操作+下载IPOS程序。
初始化操作如下:
1.点击start-up.出现下面画面。
注意控制器和马达的型号和参数。
2.点击Start-upSet1.出现下面画面。
3.选择Executecompletestart-up.点击“下一步”按钮。
出现下面画面。
4注意马达型号和其他参数。
点击“下一步”。
出现下面画面
5.选择“下一步”出现下面画面。
6.选择PositioningwithIPOS.点击“下一步”。
7.Loadinertia选择电机带动负载重量(工程经验值J0motor参数的5-8倍)。
选择完后,点击“下一步”,出现下面画面。
8.设置电流极限值(200℅)、转速监视时间(1S)。
.再点击“下一步’,出现下一画面。
9.控制器参数接受建议值,点击”Applyproposal”.再点击“下一步’,出现下一画面。
10.可使用参考值,点击”Applyproposal”.但是100和101参数须改为fieldbus,再点击“下一步’,出现download画面。
11.点击download,把参数下载下去。
12.打开软件。
参数6。
Terminal assignment设置参照实际输入输出。
参数870-876设置可参考下面
执行下载然后点击“start”按钮或闪电标记。
13.选择手动操作,验证控制器和电机接线是否正确;
刹车是否正常释放;
机械是否卡堵或过载。
在进行手动操作测试前,要保证DI00=1即X13的第1个端子要有24VDC。
14.IPOS程序下载方法:
打开软件,与控制器连接上。
打开“机器人夹具最终。
IPC”。
 升级会员
升级会员 