圆度仪说明书Word文件下载.docx
《圆度仪说明书Word文件下载.docx》由会员分享,可在线阅读,更多相关《圆度仪说明书Word文件下载.docx(100页珍藏版)》请在冰豆网上搜索。
跳动轴向测量
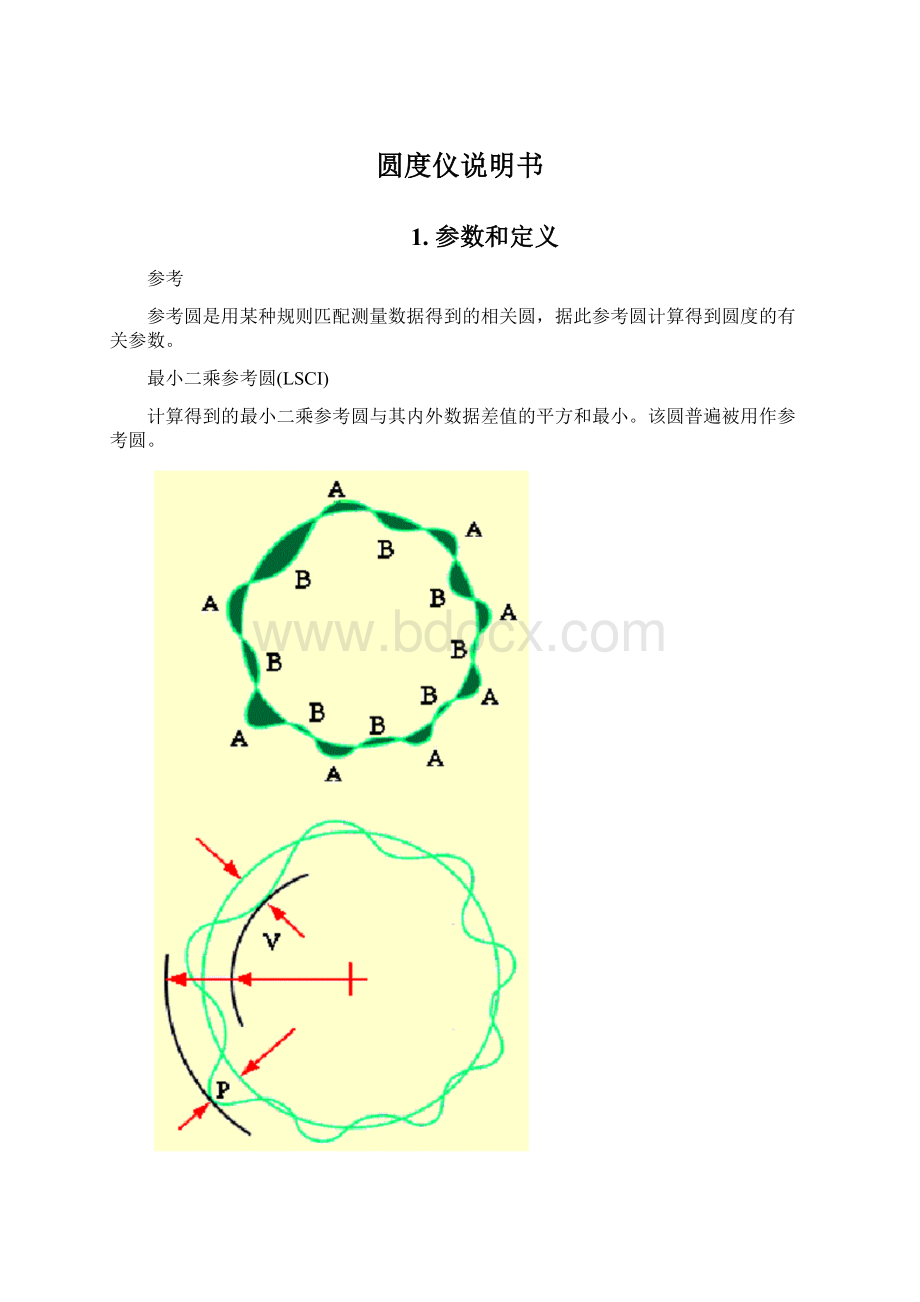
这是两个平行平面的最小轴向间隔,这两个平面本身垂直于参考轴线,并且完全包容被测数据。
D=基准轴R=跳动S=参考平面垂直度T=测量半径
半径轴向测量
直线度
直线度可用最小二乘或最小区域方法来定义。
拟合一直线,测量数据至该直线差值的平方和最小。
拟合两个平行直线,使其完全包容测量数据,且间隔最小。
直线度的值为这两个平行直线之间的间隔。
平行度
平行度可用最小二乘或最小区域方法来定义。
用一段被测数据建立基准直线,可用最小二乘直线或一对最小区域直线得到。
由第二段被测数据得到一最小二乘直线。
平行度的值为基准直线和第二条最小二乘直线在直线度数据长度段范围内的间隔差值。
平行度的值为与基准直线平行的两个直线之间的最小间隔,该两直线完全包容第二段测量数据。
最小二乘参考圆柱(LSCY)
‘最小二乘参考圆柱’是通过对选定参与轴线计算的每个被测圆的最小二乘圆的圆心来计算的。
圆柱轴线是通过这些圆心的最小二乘直线。
A=测量数据B=圆柱轴线C=最小二乘圆中心
最小区域参考圆柱(MZCY)
最小区域参考圆柱是通过对选定参于定义圆柱轴线的每个被测圆的选定的数据点进行处理来计算得到的。
用两个同轴圆柱来拟合被测数据。
调解这两个圆柱的直径及方位使其完全包容被测数据,并且两个圆柱之间的间隔最小。
A=测量数据B=圆柱轴线
最大内切参考圆柱(MICY)
对选定参于定义圆柱轴线的每个被测数据的选定数据点进行处理,拟合一个圆柱,使其直径最大并使所有被测数据都在此圆柱之外。
最小外接参考圆柱(MCCY)
对选定参于定义圆柱轴线的每个被测数据的选定个数的数据点进行处理,拟合一个圆柱,使其直径最小并使其包容所有被测数据。
圆柱峰谷值
这在圆柱参考轴线运算后计算。
圆柱平行度
以使用者选定的方位通过圆柱轴线建立一个纵切面。
用圆柱轴线一边所有点建立最小二乘直线,同样,用圆柱轴线另一边所有点建立第二条最小二乘直线。
在该方位圆柱平行度是最高测量平面和最低测量平面处两最小二乘直线间隔的差值。
A=数据点B=圆柱轴线C=最小二乘直线L=圆柱长度
D1=圆柱顶部最小二乘直线直径D2=圆柱底部最小二乘直线直径
圆柱平行度=D1-D2
如果在顶部处的间距(D1)大于底部的间距(D2),该值为正值。
如果在顶部处的间距(D1)小于底部的间距(D2),该值为负值。
注意:
对于间断的轮廓,超出范围的数据点在计算时被忽略。
所选的纵切面的方位在圆柱度显示页面以角度值给出。
锥角
此项分析采用圆柱度分析时所用的最高平面和最低平面进行计算。
对这两个平面各拟合一个最小二乘圆,锥角根据其半径和间距计算。
锥角
式中,R=半径Z=间隔
最大圆柱平行度
这是圆柱平行度值的最大值。
显示最大圆柱平行度时,相应的方位角同时给出。
参考圆柱和圆柱轴线只能从为确定此轴线所选的测量数据计算得到。
对主轴轴线,所有测量数据都参与计算。
同心度
同心度是偏心的两倍。
同心度的数值为一圆的直径,该圆由图形中心绕基准点旋转产生。
以上符号用以表示同心度。
A=基准点B=图形中心点
同心度示意图
共轴度
这一参数可以选用ISO(ISO1101)或DIN(DIN7184)的定义进行评定。
按ISO评定的共轴度值为一圆柱的直径,该圆柱与基准圆柱同轴,而且包容被评定圆柱的轴线。
按DIN评定的共轴度值为一圆柱的直径,该圆柱与基准圆柱同轴,而且包容被评定圆柱各截面的圆心。
Z高度
相对与工件底部或选择的基准的高度。
全跳动
一系列测量所获得的最大跳动值。
什么是谐波分析
在圆形轮廓上谐波可以考虑为统一的波(正弦波)叠加在工件表面上。
事实上,任意圆度图形可由一系列正弦波叠加组成,举列如下:
A-一次谐波(偏心)
B-二次谐波(椭圆)
C-五次谐波
下面例子中的图形由3次谐波、7次谐波和50次谐波组成。
计算谐波
对于类似上面例子中的圆形轮廓,计算谐波数和测量谐波的幅值相对比较容易。
但是,对于由超过1次或两次谐波组成的轮廓,一般都由10到12种谐波组成,此时计算机是非常必须的。
Talyrond圆度仪计算谐波采用了“快速傅立叶变换”算法。
该算法将图形分离成一系列要素波前并计算每一个谐波的幅值和位相角。
屏幕上用直方图或表格形式显示。
位相角是指相当于主轴0度位置的角度。
结果
下图所示的工件有8个均匀分布的槽。
如果我们在X-X截面测量,典型的谐波图形如下图所示。
直方图显示槽对工件的其他区域有显著影响,8次谐波幅值最大,其他谐波是8的倍数。
这些谐波可能因为工件槽而导致磨轮的振动而引起。
一次谐波为调整误差(工件中心与主轴中心的偏心)。
二次谐波可能也是由于调整误差引起,即工件未调平。
64UPR附近的谐波可能由于磨床的刚性引起。
谐波的定义
轮廓图形可以用一傅立叶级数来表示。
傅立叶定理表明任何周期的波形都可以用各正弦波分量之和表示。
圆度轮廓谐波定义为每周的波动数。
于是,这表示了基本的正弦波(谐波)。
基本谐波是表示数据偏心的一种方法(与标准参考圆LSCI,MZCI,MCCI和MICI对应)。
系列中剩余的谐波则是基本谐波的整除空间分量。
这些分量被称为第n次谐波,例如,二次谐波是基本谐波除以2,使得每周有两个起伏(即椭圆)。
将给出最多500次谐波,但这仅是人为的限制,所用的采样方法将导致高于500次的谐波被衰减。
第500次谐波被衰减到5%,如下图所示。
在谐波计算时,只能使用500UPR的滤波。
系列中每一项都有自己的幅值和位相,幅值用µ
m(或µ
in)给出。
位相用度给出,表示相对于主轴零度位置的偏离值。
该分析是用快速傅立叶算法实现的。
间断的数据不能用该方法分析。
圆度定义表
参数
显示名称
符号
标准
定义
峰谷值
RONt
ISO12181-1(草案)1998
8.1
为测量图形上数据点与参考圆LS,MC,MI和MZ偏离的最大值和最小值的差值。
峰值
RONp
无
8.2
测量数据点距参考圆的最大值。
峰值位置用角度显示。
仅适用LS参考圆。
峰位置
RONpPos
谷值
RONv
8.3
测量数据点距参考圆的最小值。
谷值位置用角度显示。
谷位置
RONvPos
偏心
Ecc
TH定义
参考圆圆心与选定的基准轴(或点)的半径差值。
偏心角
EccPos
偏心点与主轴的角度。
Conc
ISO1101
为一圆的直径,该圆由选定的图形中心绕选定的基准点旋转产生。
为偏心的两倍。
Runout
最大坡度值
SlopeMax
半径相当于角度在一个角度窗口内的变化率,测量数据每一个窗口位置均计算并被储存。
最大坡度值为其中的最大值。
平均坡度
SlopeAverage
平均坡度为存储的坡度值的平均值。
窗口角度
SlopeWindow
坡度限定因子-操作者选定角度范围,在该角度范围内进行坡度计算。
最大坡度角度位置
SlopePos
最大坡度窗口的角度位置。
DFTC值
DFTC
计算并存储在测量数据每一个窗口位置相对于参考中心的径向偏离量。
DFTC值是指其中的最大值。
DFTC窗口角度
DFTCWindow
操作者选定的角度范围,在该角度范围内进行径向偏离的计算。
DFTC角度位置半径
DFTCPos
最大DFTC窗口的角度位置。
Radius
R
参考圆的半径。
该值取决于横臂的标定,仅供参考。
Zht
测量面的Z向高度
分析数据的百分比
ProfileIncl
被分析的数据所占的百分比。
平面度(单个平面)定义表
FLTt
ISO12781(草案)1998
为测量图形上数据点与参考平面(LS或MZ)偏离的最大值和最小值的差值。
对基准的峰值
FLTp
"
为测量图形上数据点与参考平面(仅适用LS)偏离的最大值。
显示峰值的角度位置。
峰值角度位置
FLTpPos
对基准的谷值
FLTv
为测量图形上数据点与参考平面(仅适用LS)偏离的最小值。
显示谷值的角度位置。
谷值角度位置
FLTvPos
最大平面度角度位置
FLTPos
参考平面最大坡度时的主轴角度位置。
(必须与平面度结果相联系)
垂直度值
Sqr
与基准正交并完全包容参考平面的两平行平面的轴向最小间隔。
垂直度角度
SqrAng
同基准轴正交的平面与参考平面之间的最大角度。
垂直度半径
SqrRadius
计算数据垂直度时的半径值。
在不同半径的垂直度值可用下列公式计算:
垂直度主轴角度
SqrPos
DN0117
是指垂直度发生处的主轴角度。
平行度值
Par
与基准面平行并完全包容参考平面的两平行平面的最小间隔。
平行度角度
ParAng
基准平面与参考平面的最大角度。
平行度主轴角度
ParPos
是指平行度发生处的主轴角度。
平行度半径
ParRadius
计算数据平行度时的半径值。
在不同半径的平行度值可用下列公式计算:
与基准轴正交并完全包容测量数据的两平行平面的轴向最小间隔。
测量平面的半径-相对于用户选定的工件座标并可能不是实际的工件半径。
平均Z高度
ZhtAverage
被分析数据点的平均Z高度。
仅有180度间隔对应点的数据点被分析
DFTP值
DFTP
在一个选定的窗口内相对于基准平面的峰谷值。
DFTP窗口角度
DFTPWindows
操作者选定的角度范围,在该角度范围内进行DFTP计算。
DFTP角度位置
DFTPPos
最大DFTP的角度位置。
最大坡度
平均坡度是指存储的坡度值的平均值。
坡度窗口
操作者选定的角度范围,在该角度范围内进行坡度计算。
最大坡度的角度位置。
平面度(多平面)定义表
与平面度参数定义相同,除用全跳动替代跳动
TotalRunout
与单个平面的跳动类似,这里有超过一个平面的数据被分析。
峰值半径
FLTpRad
包含峰值的平面的半径值。
谷值半径
FLTvRad
包含谷值的平面的半径值。
直线度定义表
STRt
ISO12780-1(草案)1998
为测量图形上数据点与参考直线(LS或MZ)偏离的最大值和最小值的差值。
(水平或垂直直线度)
STRp
STRpPos
为测量图形上数据点与最小二乘直线(仅适用LS)偏离的最大值。
给出峰值的位置。
STRv
STRvPos
为测量图形上数据点与最小二乘直线(仅适用LS)偏离的最小值。
给出谷值的位置。
扫描长度
TravLth
[1],[2]
测量的长度
扫描开始点
TravStart
扫描的开始点
扫描结束点
TravEnd
扫描的结束点
主轴位置
SpindleAng
测量的角度位置
局部峰谷值
ZoomSTRt
为已有参考直线的子测量图形的PV值。
只有当用户选择对测量图形局部放大时才出现该值。
局部扫描长度
ZoomLth
选择的放大区域的长度
局部扫描开始点
ZoomTravStart
局部扫描的开始点
局部扫描结束点
ZoomTravEnd
局部扫描的结束点
轴平行度
AxisPar
与基准轴平行并完全包容参考直线的的两条直线的最小间隔。
(只有在跳动基准被选择,过去被称为对基准的跳动)
轴平行度角度
AxisParAng
基准线对参考线的夹角。
(过去被称为跳动角度)
圆柱度定义表
圆柱度峰谷值
CYLt
ISO12780-1
(草案)1998
与参考基准轴同轴并完全包容测量数据点的两个圆柱的径向间距。
有LS,MC,MI和MZ四种参考圆柱。
圆柱度峰位置
CYLp
为测量图形上数据点与最小二乘参考圆柱(仅适用LS)偏离的最大正值。
给出峰值的角度和平面(Z轴高度)位置。
峰的角度位置
CYLpPos
峰的Z高度
CYLpPlnZht
圆柱度谷位置
CYLv
为测量图形上数据点与最小二乘参考圆柱(仅适用LS)偏离的最大负值的绝对值。
给出谷值的角度和平面(Z轴高度)位置。
谷的角度位置
CYLvPos
谷的Z高度
CYLvPlnZht
共轴度ISO
CoaxISO
1983
为一圆柱的直径,该圆柱与基准轴同轴,而且包容被评定圆柱的轴线。
(对选定的基准轴)
共轴度DIN
CoaxDIN
DIN7184
为一圆柱的直径,该圆柱与基准轴同轴,而且包容被评定圆柱各截面的最小二乘圆心。
ISO12180-1
(草案)1998
与圆度跳动类似,这里有超过一个平面的数据被分析。
圆柱锥度
CLYtt
最大的圆柱平行度值。
在每一个角度位置,或纵切面,通过与该面相交的数据点建立两条最小二乘直线。
圆柱平行度值是该两条直线在最高和最低测量平面间隔的差值。
过去被称为最大平行度值。
最大圆柱锥度角度位置
CLYttPos
相对于主轴零位置圆柱最大平行度值发生的角度位置。
过去被称为最大平行度角度。
圆柱锥度的平均值
CLYttAv
圆柱平行度的平均值,根据所有纵切面计算。
最小二乘锥角
ConeAng
用两个最小二乘圆拟合选择用于分析的平面中的最上和最下两个截面。
锥角根据该两个平面的半径和间隔计算。
位相
Phase
由选择用于分析的平面建立的参考轴线相对于主轴零度线之间的夹角。
倾斜
Tilt
由选择用于分析的平面建立的参考轴线相对于主轴轴线之间的夹角。
Profile%
圆柱半径的峰谷值
CYLrr
ISO12180-1:
19999.7
最小二乘拟合后,最大半径减去最小半径。
(当前不支持,新的在ISO12180)
圆柱锥角
CYLat
19999.8
参考轴线相当于一条半径的夹角。
平行度定义表
PAR
ISO1011983
1972(用MZ)
[1](用LS)
在测量长度内,基准线与被评定的直线的最小二乘直线最大和最小间隔差。
平行角度
PARAng
选定的参考直线和通过基准的最小二乘直线之间的夹角。
PARPV
被考虑的直线度轨迹的峰谷值
被分析的数据所占的百分比
均分线的跳动
[1]
计算的均分线与第二基准线的偏离,在测量长度上分析。
该跳动是两条直线垂直方向的差别并永远为正值。
(如选择了第二基准)
跳动角
RunoutAng
第二基准与均分线之间的夹角。
谐波定义表
幅值
Amplitude
用于圆度分析的参数
圆度参数
RONtConc
RONPSlopeMax
RONpPosRunout
RONvProfileIncl
RONvPosRadius
EccDFTC
EccPosZht
平面度参数(单个平面)
FLTtPar
FLTpParAng
FLTpPosParPos
FLTvRunout
FLTvPosRadius
FLTPosZhtAverage
SqrDFTP
SqrAngProfileIncl
SqrPosSlopeMax
平面度参数(多个平面)
RadiusMax
直线度参数
StraightnessParameters
STRtProfileIncl
STRpTrav.Lth
STRpPosTrav.Start
STRvTrav.End
AxisParAngle
圆柱度参数
CYLtCoaxISO
CYLpCoaxDin
CYLpPosTotalRunout
CYLpPinCYLtt
ZhtCYLttPos
CYLvCYLttAv
CYLvPosConeAng
CYLvPinPhase
ZhtTilt
Profile%CYLrr
2.Talyrond265
轴的移动
横臂移动(R)控制
该控制图标可用下面的方法选择得到:
在主菜单上点击Talyrond,从下拉菜单中选择Control(控制),然后选择RadialArm(R)(横臂R)。
请注意:
如果该图标已打开,该选项将为灰色。
在主菜单上点击Talyrond,选择InstrumentStatus(仪器状态),双击InstrumentStatus(仪器状态)图标中的横臂图标。
在InstrumentStatus(仪器状态)图标中的横臂图标上按鼠标右键,从下拉菜单中选择Control(控制)。
该图标上有以下按钮:
相对移动R(负)
选择该按钮将显示相对移动R(负)对话框。
该对话框用来控制横臂外伸的移动量。
缺省的Arm(R)Distance(横臂R距离)为0mm,因此要使横臂移动,必须输入一个相应的数字。
一旦输入并选择OK,横臂将相对于当前位置移动所输入的距离。
相对移动R(正)
选择该按钮将显示相对移动R(正)对话框。
该对话框用来控制横臂回收的移动量。
一旦输入并选择OK,横臂将相对于当前位置移动所输
 升级会员
升级会员 