流动舞台方案Word文件下载.docx
《流动舞台方案Word文件下载.docx》由会员分享,可在线阅读,更多相关《流动舞台方案Word文件下载.docx(24页珍藏版)》请在冰豆网上搜索。
1).原理:
一台伺服电机带动双出轴行星减速器,通过两根传动轴带动四个小齿轮在齿条上运动;
3).功率、载荷、行程:
P=2.2kW;
静载0.4t/m2;
动载0.2t/m2;
行程1.5米
电梯导轨导向;
摆动偏差不超过5mm;
重复定位偏差不超过3mm。
占用空间小,实用空间为0.7m*0.7m正方形;
结构简单,可靠性高;
两根传动轴机械同步,带动齿轮运动,同步性好;
升降行程较大,可达到1.5米
电梯导轨
结构简单,没有采用电动缸驱动,可能需加装防护罩;
电梯导靴
俯视图
二、复合升降台一级升降系统机械设计
平台转盘直径700mm;
直径700mm平台先上升100mm与1.9米舞台平齐,接着再上升1000mm,行程过程中速度为111mm/s;
双侧伺服电动缸通过链条带动托盘运动
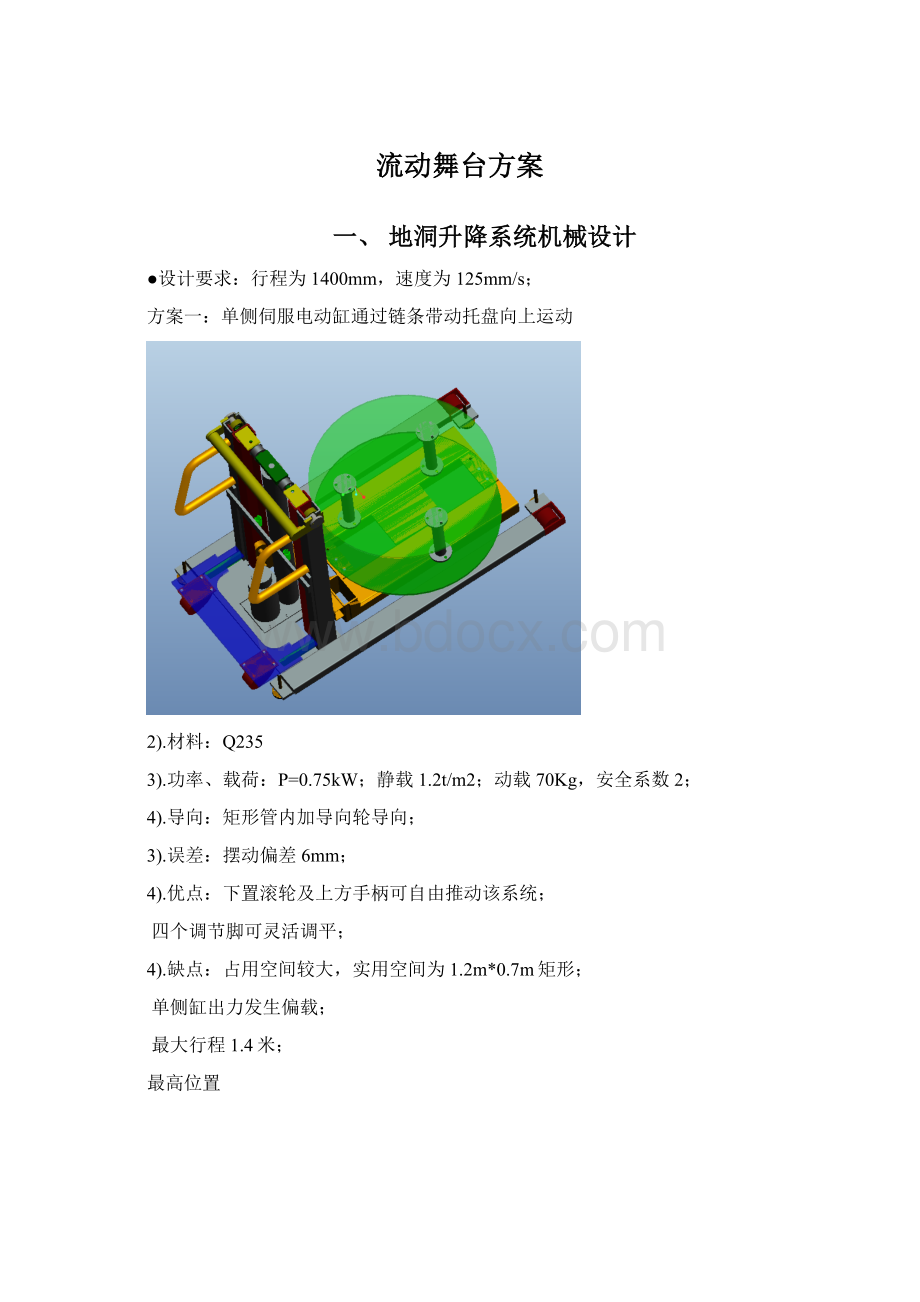
1).材料:
2).功率、载荷、行程:
行程1.1米
3).导向:
4).误差:
摆动偏差不超过6mm;
5).优点:
伺服控制双侧缸同步出力,受力情况较好;
四个调节脚可灵活调平;
6).缺点:
占用空间较大,实用空间为1.7m*0.7m矩形;
单侧伺服电动缸通过链条带动托盘运动
P=1kW;
结构比双缸系统简单,成本低;
占用空间较大,实用空间为1.6m*0.7m矩形;
伺服控制单侧缸同步出力,受偏载,或致卡死;
方案三:
闭环链式,两侧伺服驱动
两台伺服电机分别带动双出轴行星减速器,通过四根传动轴带动四个链轮转动,从而移动链条拉动0.7米升降平台;
占用空间小,实用空间为1.4m*0.9m正方形;
每两根传动轴机械同步,带动齿轮运动,同步性好;
四周四根立柱位置稳固,不易变形;
结构简单,没有采用电动缸驱动;
三、复合升降台二级升降、旋转系统机械设计
直径0.1m倒立杆升降550mm,行程速度125mm/s,可在0~20°
/s之间无级回转。
两台伺服电动缸顶升托盘升降
1).特点:
一台伺服电机带动直齿条升降机构顶升倒立杆,行程0.55m;
倒立杆结构中包含包含旋转用伺服电机与减速器;
3).升降功率、载荷:
两台P=0.4kW;
3).旋转功率、载荷:
一台P=0.4kW;
两根导向柱导向;
两根导向柱同时导向;
导向轮处于中间托盘上,使得倒立杆伸出端较长;
下方由两台伺服电动缸同步驱动,对同步性要求高、成本高;
升降采用直齿条升降机构;
旋转采用齿轮组联接驱动设备。
一台P=1.5kW;
动载0.2t/m2,安全系数1.25;
一台P=0.75kW;
导柱、导轮导向;
导向轮处于舞台平面最上端,可最大程度保证倒立杆的稳定;
结构简单、紧凑;
无级旋转采用齿轮组,由此可减小减速器尺寸,减轻重量
直齿条升降机稳定性较低;
升降采用一台伺服电动缸升降机构;
倒立杆结构中包含旋转用伺服电机与减速器;
伺服电动缸驱动可靠性高、精度高;
四、升降转台一级升降系统
转台直径2.6米,可以承重20人,可以升高舞台以上0.8米,降到舞台下1.4米;
舞台上升速度为10秒1米,即100mm/s;
2).功率、载荷:
两台P=7.5kW伺服电动缸;
静载1.4t/m2;
动载2t;
导向间隙较大
采用伺服电动缸来驱动,可从地面零点开始上升,升降行程较大,安全可靠。
加入两组桁架,不仅克服因偏载而发生的倾斜,还能够减小由于制造、安装误差的影响。
调平地脚结构内部为球铰连接,故在地面不平整时,该地脚可灵活调平系统机构。
单侧缸出力发生偏载;
加入桁架后自重增大,桁架结构自身两侧不平衡,也会引起一定偏载;
双侧闭式链条驱动通过链条带动托盘向上运动
两台伺服电机分别带动双出轴行星减速器,通过四根传动轴带动四个链轮转动,从而移动链条拉动2.6米升降平台;
3).功率:
两台P=5kW;
动载0.5t/m2;
5).误差:
6).优点:
结构简单,可靠性高;
四周四根立柱位置稳固,不易变形;
7).缺点:
占用空间与方案一相同
五、升降转台二级升降系统
可以升高舞台以上0.8米,降到舞台下1.4米;
整个转台采用伺服控制电机,可以可控无级回转。
伺服电动缸—剪叉式机构
两个主驱动缸过大,初始位置出力太大,故加装两个辅助缸来减小初始推力
两台P=5kW,两台P=2kW,共14kW;
剪叉式导向,加装直线导轨
摆动偏差不超过3mm;
一边铰支固定,一边做滚轮加直线导轨,直线导轨可保证行走精度及平台上升平稳性。
功率较大,利用率不高;
上升速度较快,电动缸出力可能不平稳,直线导轨可缓解部分不平稳现象;
横向分力过大,或致一级升降平台水平拉力过大;
结构较复杂,成本高,检修难道大;
两组缸主动从动交替,在控制上不好实现匀速;
机械丝杠拽引—凸轮剪叉式机构
一台P=8kW;
结构相对简单,成本低;
剪叉式升降结构稳固、故障率低、运行可靠、安全高效、维护简单方便。
保证剪叉升降机自身整体高度最小,且上升运行最稳定。
凸轮结构保证在起升初始阶段,即角度最小时,丝杠出力也达到最小,随着平台升高出力逐步增大。
一台电机机械同步带动两根丝杠同步动作,同步性好。
一边铰支固定,一边做滚轮加直线导轨,直线导轨可保证行走精度及平台上升平稳性。
凸轮曲线加工精度要求高
伺服电机驱动--柔性链条机构
P=8kW;
静载1.0t/m2;
摆动偏差不超过4mm;
采用四组柔性链条对称起升,出力均匀;
原始高度较高,不能满足纵向空间要求,高度约为650mm,即升高行程仅为1250mm。
柔性链条上升运动不平稳;
方案四:
伺服电机驱动--大螺旋机构
选用PACO公司的大螺旋升降机产品ND9系列,该升降机具有运行稳固、精确度高、起重能力高、很低的收缩高度等显著特点。
P=5kW;
静载10t/m2;
动载4.45t;
剪叉式导向,加装直线导轨
保证剪叉升降机自身整体高度最小,且上升运行最稳定;
保证剪叉升降机自身整体高度最小;
上升运行较稳定。
直接向上方出力顶升,易于电气控制参数。
占用空间最小;
没有成品机械作参考;
起升高度最大,可达1.5米
六、升降转台旋转系统
转台直径2.6米,可以承重20人回转的最高转速为转速为34秒1圈,即2.5r/min;
最大负载为1.4t。
方案:
回转支撑带齿轮
舞台无级回转采用结构简单的伺服电机—行星减速器驱动齿轮,带动轻型回转支撑
选用滚针轴承、推力球轴承都会在偏载情况下发生倾覆现象,故不能采用平台轴承。
此方案中选用带齿的回转支撑结构,该结构具有很好的防偏载、抗倾覆性能,还能增大力矩,增大减速比。
由于高度限制,选用轻薄型回转支撑能够满足厚度要求,但太薄可能会因为上平台的刚度不够导致平台变形压向剪叉股的上平台,因此在旋转平台设计好后要进行结构静力学仿真。
七、台下系统的控制
1.地洞升降系统电气控制部分
1)地洞升降台电气构成:
洞升降台电气控制系统共包括5个0.7米升降平台。
2)地洞升降台电气控制系统计划实现如下功能:
通过上位机触摸屏或手持无线遥控器控制其0.7m地洞升降台的升降与旋转动作,升降、旋转的运行速度均通过触屏进行设定。
2.复合升降台系统电气控制部分
1)复合升降台电气构成:
该系统包括一个0.7平米升降平台与一个0.04平米撑杆。
2)复合升降台电气控制系统计划实现如下功能:
通过上位机触摸屏或手持无线遥控器控制0.7米复合升降台(含撑杆)的升降与旋转动作,升降、旋转机构的运行速度均可通过触屏进行设定。
3.升降转台系统电气控制部分
1)升降转台电气构成:
该系统包括一个2.6平米升降平台,其升降分为一级机构与二级机构。
2)升降转台电气控制系统计划实现如下功能:
通过上位机触摸屏或手持无线遥控器控制该转台的升降与旋转动作,升降、旋转机构的运行速度均可通过触屏进行设定。
3.整体控制示意图
1)整体控制示意图
控制示意图
如图所示,系统运行时,可通过触摸屏或手持无线遥控器控制转台、复合升降台(含撑杆)及地洞升降台的运行动作,可进行单动或联动。
升降动作的驱动机构由伺服电动缸完成,旋转动作由伺服电机驱动,电机线缆均通过航插与控制柜连接,升降动作均有行程开关进行极限行程限位,转台的升降位置可由传感器反馈到触摸屏上,各部件升降与旋转动作的速度均可在触屏上进行手动调节,并在触屏上有相应动作指示与各报警状态指示。
舞台台下伺服控制系统作闭环控制,由上位机触摸屏输入给定速度,经由plc控制器作数据处理后给伺服驱动器发送脉冲信号,控制电机的转动速度,进而驱动电动缸推动平台升降,同时电机的编码器可反馈脉冲给plc,即可反映升降平台的位置信息。
系统框图
2)安全保护设计
本部分系统设计有多重安全保护措施,伺服电缸控制部分配备控制电机运行极限位置的限位开关,操作台柜体与控制柜上均有急停按钮,操作人员若发现异常可一键停车,同时柜体与触屏上均配有故障指示灯,当系统出现故障时可在触屏上显示详细故障信息。
3)核心控制元件一览
西门子CPU313C控制器西门子KTP1000BasiccolorPN触摸屏伺服电缸
八、轨道滑车机械系统
●功能需求
弧形滑车轨道(3组):
工字型轨道,单根弧形轨道长度60m(以实际马道长度为准);
轨道间间距1.5米。
轨道采用拼接结构。
每两根轨道为一套,共三套。
每套轨道上运行两台滑车。
滑车(6台套):
自带升降,滑车可以在轨道下走行。
行走速度:
0~30m/min。
升降速度:
0~20m/min。
载重300Kg。
固定在马道下面,部分需要用横梁分开。
可制动。
行走可无级调速。
升降可无级调速。
将高强度铝合金轨道用扣件和U板组件固定在马道下面。
滑车沿着轨道预设轨迹前后往复运动。
滑车自带升降组件,可实现竖直方向升降运动。
1).行走机构:
安装在车体上,采用永磁同步无刷伺服电机配合涡轮涡杆减速器驱动拨杆轮,拨杆轮与孔形带啮合进而驱动滑车在轨道上完成带载水平运动、爬坡运动、制动动作等。
2).升降机构:
从车体下方固定在车体上,采用变频电机涡轮涡杆减速器驱动卷扬机构,从而实现精确收起和下放。
3).供电系统:
采用多极封闭式滑触线,由高强度绝缘导管和排列在导管内的铜导体、集电器以及相关组件组合而成,它结构紧凑、体积小、重量轻、安装便捷、安全节能等特点
4).材料:
高强度铝合金轨道,型材M-2491。
轨道截面形状是180×
60工字型。
5).功率、载荷:
行走P=1.5kW/台车,升降P=1.5kW/台车;
动载150Kg;
采用高强度铝合金工字型材,其重量轻、强度高、刚性好、造型美观;
但易腐蚀
这种安装方式方便可靠,不易松动,可多次拆装,较为实用。
通过设计承重轮,限位轮和防跳轮组使滑车只保留沿轨道方向单自由度运动能力。
使用滑触线省去了拖线行走的线缆及收线装置,结构简单;
滑触线使用不安全,易擦出火花
齿轮齿条自行走—卷扬升降系统
采用齿轮齿条自行走式,轨道根据顶架尺寸制作,轨道钢结构可以拼装以螺栓联接,上部以螺栓拉杆联接于顶架。
安装在车体上。
采用拖线供电,在舞台的两侧,收线轨道比马道的边缘末端各延长出2米,当小车行走至马道边缘时,供电线可被收于延长出的拖线轨道上;
行走机构安装上、下及两边侧导向,以稳定小车的运行轨迹。
升降系统安装压绳装置;
5).材料:
角钢;
6).功率、载荷:
行走P=2.2kW/台车,升降P=1.5kW/台车;
7).优点:
这种安装方式方便可靠,不易松动,可多次拆装,较为实用。
拖线供电方式简易安全;
8).缺点:
采用角钢型材,其不易腐蚀、强度高,但重量过大;
若换做同型号铝合金,铝合金与钢架之间无法焊接,螺钉连接会影响小车运动;
采用拖线供电方式时,拖线轨道形状置于桁架下,重量较大;
马道图
马道边缘局部放大图
九.轨道滑车控制系统
1)轨道滑车系统电气构成:
该系统共包括3组(共6个)滑车与6套滑索升降装置。
2)轨道滑车控制系统计划实现如下功能:
通过触摸屏或手持无线遥控器控制三组空中吊人滑车的进退以及滑索的升降,进退、升降速度可调节并带制动装置,可以立即停车。
3)控制柜与操作台示意图
4)操作界面
5)整体控制示意图
控制框图
舞台台上滑车滑索控制系统由交流同步伺服电机作全闭环PID控制,伺服驱动器与对应的控制plc安装在滑车上与滑车同步运动,供电电源由安全滑触线输送,控制伺服动作的plc经由无线通讯装置与主控柜上的主控plc作数据交换,滑车的运动速度与状态指示均可在触摸屏上输入与监视,控制方式可使用无线遥控器操作或在触摸屏上进行,如在主控柜触摸屏上设定好滑车或滑索的速度或运行曲线后,按下启动即可通过无线通讯控制对应滑车与滑索的运行动作。
5)安全保护设计
本系统设计有多重安全保护措施,滑索与滑车的伺服控制部分装有双重抱闸(伺服电机制动与减速机制动),同一轨道上两组滑车间均设计有防止碰撞的机械限位开关;
操作台柜体与控制柜上均有急停按钮,操作人员若发现异常可一键停车,同时柜体与触屏上均配有故障指示灯,当系统出现故障时可在触屏上显示详细故障信息。
6)核心控制元件一览
西门子CPU312C控制器西门子KTP1000BasiccolorPN触摸屏松下伺服电机
 升级会员
升级会员 