陶瓷学院机械原理作业及答案Word文档下载推荐.docx
《陶瓷学院机械原理作业及答案Word文档下载推荐.docx》由会员分享,可在线阅读,更多相关《陶瓷学院机械原理作业及答案Word文档下载推荐.docx(25页珍藏版)》请在冰豆网上搜索。
10=1
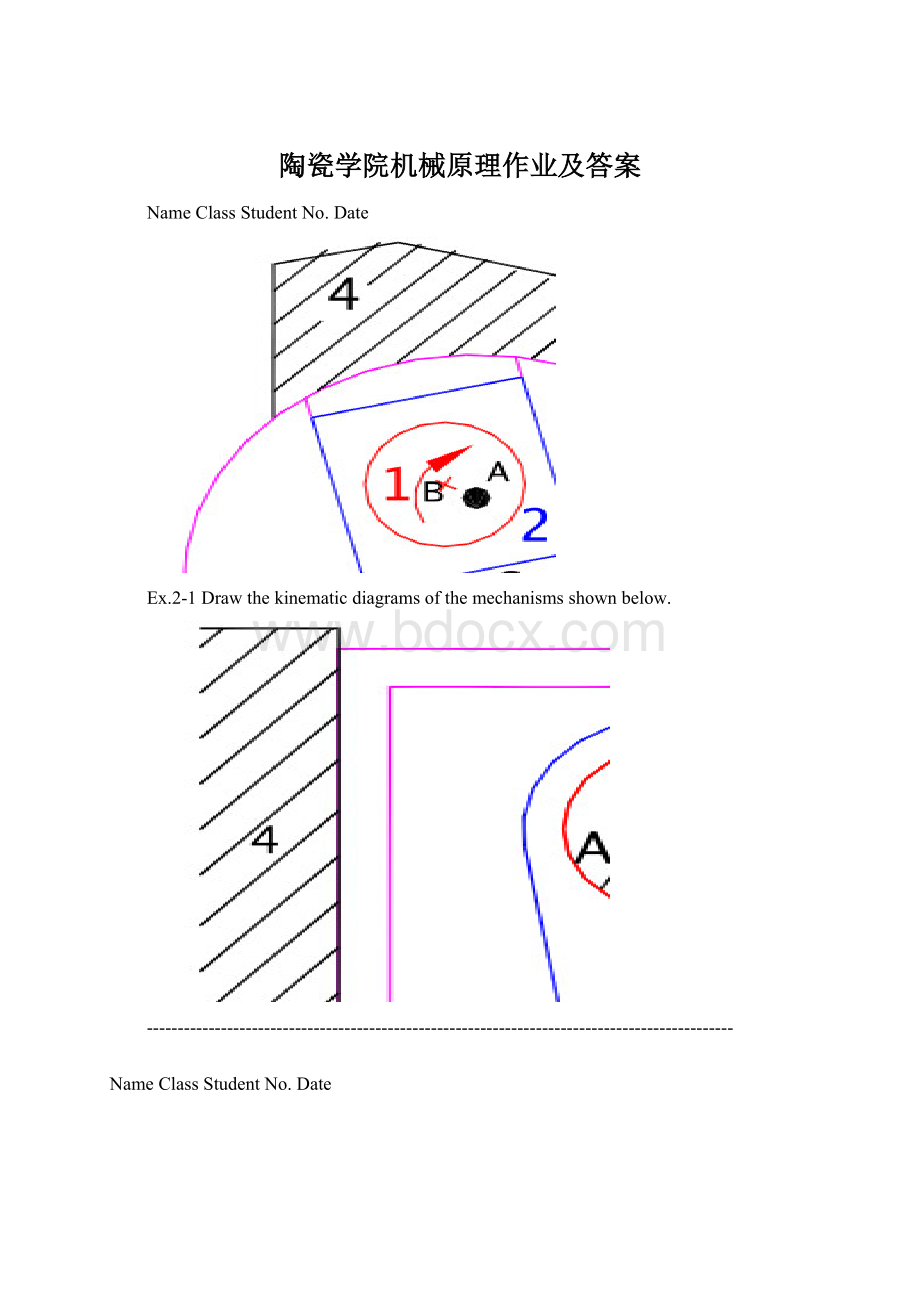
(1)红线内的构件为重复结构,构成虚约束。
(2)去掉以上构件后,C仍为构件2、3、4的复合铰链。
(3)滑块5与机架6之间为移动副。
F=3n-2PL-Ph=3×
5–2×
7=1
Ex.2-5Calculatethedegreeoffreedomofthemechanismsshownbelow.IndicateallpointsforattentionbeforethecalculationoftheDOF.
(a)两个滚子有局部自由度。
(b)滚子D与凸轮1之间只能算一个高副。
F=3n-2PL-Ph=3×
7–2×
9-2=1
(1)LinkBCisweldedtogear2
(2)Aisacompoundhingeofgear4、link1、andframe5.
4–2×
5-1=1
常见错误:
认为B是复合铰链,而不认为A是复合铰链。
Ex.2-6Calculatethedegreeoffreedomofthemechanismsshownbelow.IndicateallpointsforattentionbeforethecalculationoftheDOF.
(a)C为构件2、3、4的复合铰链。
(b)C处有两个转动副和两个移动副。
(c)E处有一个转动副和两个移动副。
注意:
E不是复合铰链!
当构件尺寸任意时,构件2作平面复杂运动,而杆4与机架间组成移动副,所以杆4仅作平动。
因此,构件2和构件4之间有相对转动。
因此,应该有构件6,并且构件4和6之间有转动副,如右图所示。
当AB=CD且BC=AD时,杆2仅作平动。
杆4与机架间组成移动副,所以杆4也仅作平动。
这样,构件2和构件4之间就没有相对转动,只有相对移动。
即:
构件4和构件6之间就没有相对转动了,因此,可将构件6与构件4焊接起来(去掉构件6),如左图所示。
然而,在计算机构自由度时,应该按一般尺寸情况下进行分析,即:
应该按照右图情况来分析机构的自由度。
5–2×
Ex.2-7Shownbelowisthekinematicdiagramofanenginemechanism.
(1)Calculatethedegreeoffreedomofthemechanism.IndicateallpointsforattentionbeforethecalculationoftheDOF.
(2)Carryoutthestructuralanalysisforthemechanism.
(3)CarryoutthestructuralanalysisforthemechanismiflinkEFGisadriver.
Note:
Duringstructuralanalysis,listtheassemblyorderofAssurgroups,thetypeofgroup,thegradeofgroup,thegradeofthemechanism,thelinkserialnumbers,theinnerpairandtheouterpairsofeachgroupineachmechanism.
(1)F=3n-2PL-Ph=3×
(2)
当AB为原动件时,
(3)当EFG为原动件时,
Ex.2-8Carryoutthestructuralanalysisforthemechanism
(a)iflink1isadriver.
(b)iflink5isadriver.
(a)iflink1isadriver,
Links2,3,4and5constituteagradeIIIAssurgroup.
Links3and4constitutethefirstRPRAssurgroup.
Links1and2constitutethesecondRPRAssurgroup.
2-9TheschematicdiagramofapunchmachinedesignedbysomeoneisshowninFig2-9.Thismachineshouldbeabletotransformacontinuousrotationofgear1intoatranslationofthepunch4.Canthemachineworkproperly?
Ifitcan’t,pleaserectifyit.
Fig2-9
不能正常工作。
改正如图(或者改成题目2-3构件5、6、7的连接)
2-10TheschematicdiagramofamechanismdesignedbysomeoneisshowninFig2-10.Thismechanismshouldbeabletotransformacontinuousrotationoflink1intoanoscillationoflink4.Canthemechanismworkproperly?
Fig2-10
Ex.3-1Locateallinstantcentresofmechanismsforthepositionshown.
Ex.3-2Forthepositionshownofagearedlinkage,determinetheratio3/1oftheangularvelocityofgear3tothatofgear1,usingthemethodofinstantcentres.
P13是构件1和3的瞬心,等速重合点,
所以,1LAE=3LDE,3/1=LAE/LDE
Ex.3-3Forthepositionshownofcammechanism,determinetheratio2/1oftheangularvelocityoffollower2tothatofcam1,usingthemethodofinstantcentres.
E(P12)是构件1和2的瞬心,等速重合点,
所以,1LOE=2LAE,2/1=LOE/LAE
Ex.3-4Inthepivotfour-barlinkageshownbelow,1=-10rad/sec.Usingthemethodofinstantcentres,
(a)findthevelocityofpointCforthepositionshown.
(b)forthepositionshown,locatethepointEonthelineBC(oritsextension)whichhastheminimumvelocityamongallpointsonthelineBCanditsextension,andthencalculateitsvelocity.
(c)drawtwopositionsofthecrankABcorrespondingtoVC=0.
(a)VB1=1LAB=VB2=2LFB,所以,VC=VC2=2LFC=1LABLFC/LFB
(b)VE=2LFE。
(c)VC=0所对应的曲柄AB的两个位置:
Ex.3-5Inthesix-barmechanismshownbelow,XA=0,YA=0,XD=450mm,YD=0,LAB=150mm,LBC=400mm,LDC=350mm,CDE=30,LDE=150mm,LEF=400mm.ThecrankABrotatesataconstantspeed10rad/sec.AmainprogramisrequiredtoanalyzetheoutputmotionsofthepointF.ThemechanismwillbeanalyzedforthewholecyclewhenthedriverABrotatesfrom0to360withastepsizeof5.
FORI=0TO360STEP5
CALLLINK(0,0,0,0,0,0,I*PI/180,10,0,150,
XB,YB,VBX,VBY,ABX,ABY)
CALLRRR(450,0,0,0,0,0,XB,YB,VBX,VBY,
ABX,ABY,350,400,Q3,W3,E3,Q2,W2,E2)
CALLLINK(450,0,0,0,0,0,Q3-PI/6,W3,E3,
150,XE,YE,VEX,VEY,AEX,AEY)
CALLRRP(1,0,400,XE,YE,VEX,VEY,AEX,
AEY,Q5,W5,E5)
CALLLINK(XE,YE,VEX,VEY,AEX,AEY,Q5,W5,
E5,400,XF,YF,VFX,VFY,AFX,AFY)
PRINTI,XF,YF,VFX,VFY,AFX,AFY
NEXTI
END
Ex3-7.Inthemechanismshownbelow,XG=YG=0,XB=-42,YB=39,XD=10,YD=75,LBA=23mm,LGF=12mm,LFE=95mm,LEC=69mm,LDC=48mm,EFG=90.ThecrankBArotatesataconstantspeedof10rad/sec.AmainprogramisrequiredtoanalyzetheoutputmotionsofthepointC.ThemechanismwillbeanalyzedforthewholecyclewhenthedriverBArotatesfrom0to360withastepsizeof5.
CALLLINK(-42,39,0,0,0,0,I*PI/180,10,0,23,XA,YA,VAX,VAY,AAX,AAY)
CALLRPR(-1,0,0,0,0,0,0,XA,YA,VAX,VAY,AAX,AAY,12,QFE,W3,E3)
CALLLINK(0,0,0,0,0,0,QFE+0.12565033
W3,E3,95.75489544,XE,YE,VEX,VEY,AEX,AEY)
CALLRRR(XE,YE,VEX,VEY,AEX,AEY,10,75,0,0,0,0,69,48,QEC,W4,E4,QDC,W5,E5)
CALLLINK(10,75,0,0,0,0,QDC,W5,E5,48,XC,YC,VCX,VCY,ACX,ACY)
PRINTI,XC,YC,VCX,VCY,ACX,ACY
Ex.3-8Inthesix-barmechanismshownbelow,XB=0,YB=0,XF=37.2,YF=17.5,YC=28.8,LFE=16.8mm,LEC=39.2mm,LCD=20.633mm,LDE=36.4mm,BGA=90,LBG=9mm,LGA=58mm.ThecrankFErotatesclockwiseataconstantspeedof-10rad/sec.AmainprogramisrequiredtoanalyzetheoutputmotionsofthepointA.ThemechanismwillbeanalyzedforthewholecyclewhenthedriverFErotatesfrom360to0withastepsizeof-5.
FORI=360TO0STEP-5
CALLLINK(37.2,17.5,0,0,0,0,I*PI/180,-10,0,16.8,XE,YE,VEX,VEY,AEX,AEY)
CALLRRP(-1,28.8,39.2,XE,YE,VEX,VEY,AEX,AEY,QEC,W4,E4)
CALLLINK(XE,YE,VEX,VEY,AEX,AEY,QEC-0.548,W4,E4,36.4,XD,YD,VDX,VDY,ADX,ADY)
CALLRPR(1,0,0,0,0,0,0,XD,YD,VDX,VDY,ADX,ADY,9,QGA,W2,E2)
CALLLINK(0,0,0,0,0,0,QGA-0.153944664
W2,E2,58.69412
XA,YA,VAX,VAY,AAX,AAY)
PRINTI,XA,YA,VAX,VAY,AAX,AAY
Ex.4-1Accordingtolinkdimensions,determinethetypeofthepivotfour-barlinkagesshownbelow.
双曲柄机构曲柄摇杆机构
双摇杆机构双摇杆机构
Ex.4-3Inanoffsetslider-crankmechanismABC,thecrankABisadriver.ThemaximumpressureangleMAX=30.FindthestrokeHofthesliderandthecrankacuteanglebetweenthetwolimitingpositions.
Ex.4-4DeterminetheangularstrokesoftherockersABandCD,respectively,usinggraphicalmethod.
VB动画
Ex.4-5Shownarethetwopositions,B1C1andB2C2,ofthecouplerBCofarevolutefour-barlinkageABCD.ThelinkABisadriver.Thepressureangleatthefirstpositionis0o.Thesecondpositionofthemechanismisatoggleposition.Designthelinkage.Describebrieflythedrawingsteps.
ThefixedpivotAmustbelocatedonthebisectorofB1B2.
Similarly,DmustbelocatedonthebisectorofC1C2.
ThelinkABisadriver.Thepressureangleatthefirstpositionis0o.B1C1C1D
Thesecondpositionofthemechanismisatoggleposition.A,B2,C2三点共线
Ex.4-6Inacrank-slidermechanism,twosetsofcorrespondingpositionsbetweenthesliderandalinesegmentAEonthecrankABEareknown,asshownbelow.ThepositionC1ofthesliderisitsleftlimitingposition.FindthefirstpositionB1oftherevoluteB.Describebrieflythedrawingsteps.
作AC2’E1AC2E2,且字母旋向相同,得C2’
因C1为滑块的极限位置之一,所以B1点在AC1连线上。
作C1C2’的中垂线与AC1交于待定活动铰链点B的第一个位置点B1。
Ex.4-7Inarevolutefour-barlinkageABCD,sidelinkABisadriver.ThepositionsofthesidelinkCDandalinesegmentCEonthecouplerCBEcorrespondingtotwopositionsofthelinkageareknown.Thefirstpositionofthelinkageisalsoadeadpoint.FindthesecondpositionB2oftherevoluteB.Describebrieflythedrawingsteps.
作A2’C1E1AC2E2,得A2’点。
因AB为原动件且机构第一位置为死点,所以B1点在DC1的延长线上。
作AA2’的中垂线与DC1的延长线交于待定活动铰链点B的第一个位置点B1。
Ex.4-8Inacrank-rockerlinkageABCD,sidelinkABisadriver.ThepositionsoftherockerCDcorrespondingtotwopositionsofthelinkageareshownbelow.Atthefirstpositionofthelinkage,thepressureangleofthelinkageiszero.PositionDC2isoneofthelimit
 升级会员
升级会员 