传感器实验报告Word文档下载推荐.docx
《传感器实验报告Word文档下载推荐.docx》由会员分享,可在线阅读,更多相关《传感器实验报告Word文档下载推荐.docx(17页珍藏版)》请在冰豆网上搜索。
87
98
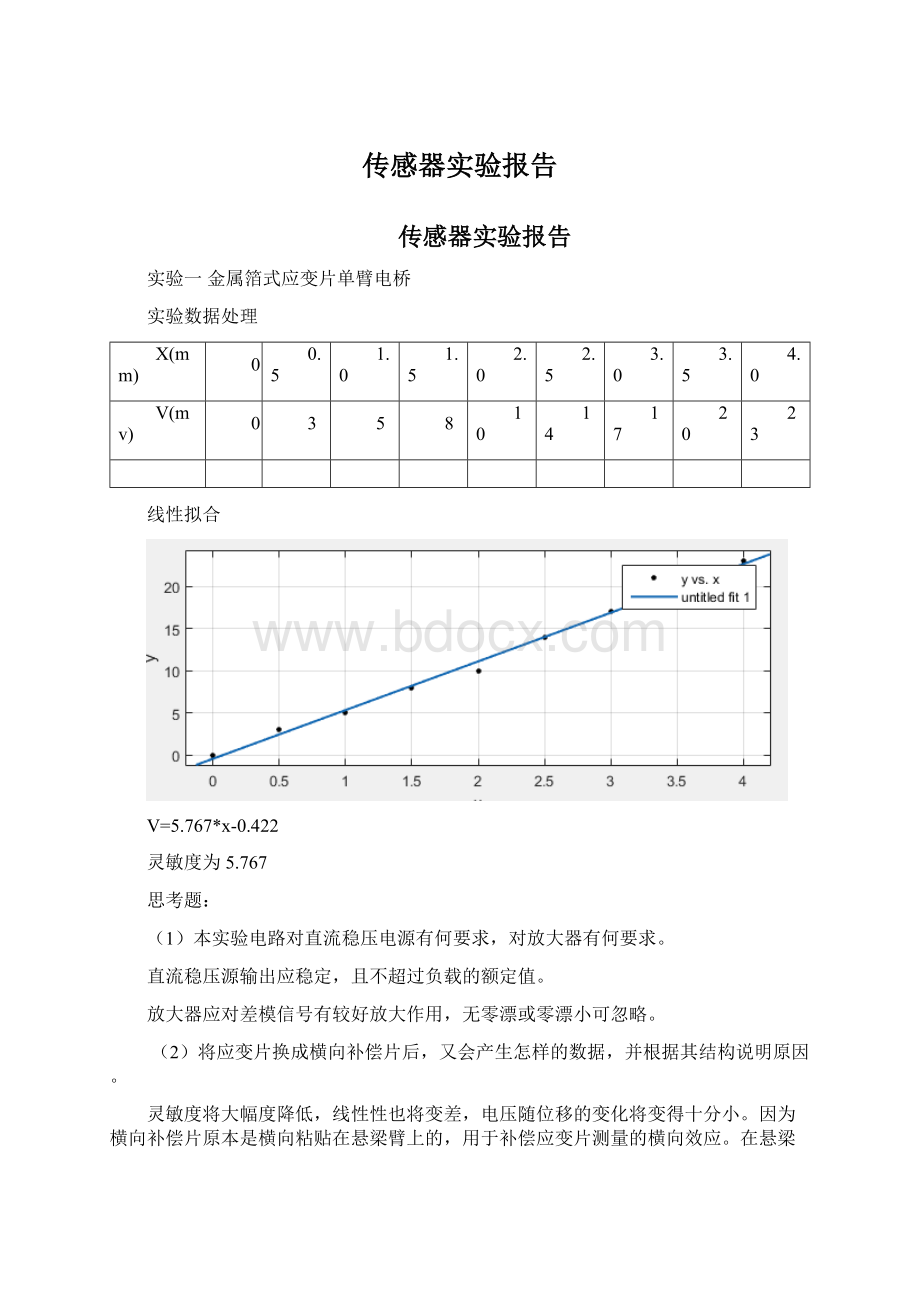
V=11.95*x+0.778
灵敏度为11.95
(1)根据应变片受力情况变化,对实验结果作出解释。
在梁上下表面受力方向相反的应变片相当于将形变放大两倍,,因此,ΔV/ΔX大约是实验一中的两倍。
(2)将受力方向相反的两片应变片换成同方向应变片后,情况又会怎样。
同方向的两片应变片相互抵消,输出为零。
(3)比较单臂,半桥两种接法的灵敏度。
在相同形变量下,半桥的灵敏度约是单臂的两倍。
实验三金属箔式应变片四臂电桥(全桥)的静态位移性能
1
2
4
6
7
51
103
126
151
173
196
V=24.15*x+1.4
灵敏度问24.15
(1)如果不考虑应变片的受力方向,结果又会怎样。
对臂应变片的受力方向应接成相同,邻臂应变片的受力方向相反,否则相互抵消没有输出
(2)比较单臂,半桥,全桥各种接法的灵敏度。
在相同形变量下,半桥灵敏度约是单臂的两倍,全桥灵敏度越是半桥的两倍,即约为全桥的四倍。
实验四金属箔式应变片四臂电桥
(全桥)振动时的幅频性能
F(Hz)
11
12
13
Vpp(mV)
19
21
58
124
108
69
29
(1)在实验过程中,观察示波器读出频率与频率表示值是否一致,据此,根据应变片的幅频特性可作何应用。
不一致。
可以根据这个原理反向测出梁的震动频率,利用应变片读出峰值,在找到对应的频率值即可。
(2)根据实验结果,可以知道梁的共振频率大致为多少。
12Hz
(3)在某一频率固定时,调节低频振荡器的幅度旋钮,改变梁的振动幅度,通过示波器读出的数据与实验三对照,是否可以推算出梁振动时的位移距离。
不可以。
实验三是一个静态过程,而本实验是一个动态过程,得到的电压并不对应于静态时的位移。
且由示波器上读出的数据误差较大。
(4)试想一下,用其他方法来测梁振动时的位移距离,并与本实验结果进行比较验证。
其他方法,如加速度计,霍尔元件等
比较:
如利用霍尔元件只能测量小范围的位移,测量的位移不能过大;
测量振动时振动频率不能太低,如果振动频率过低,磁感应强度发生变化的周期过长,大于读取脉冲信号的电路的工作周期,就会导致计数错误
而本实验相对课测量位移较大,但精确度较低
实验六热电偶的温度效应
室温18℃
毫伏表稳定示数0.95mV
EAB(T,Tn)=0.95/2=0.475mV
查表可知18℃对应热电势EAB(Tn,To)=0.711mV
从而有EAB(T,To)=EAB(T,Tn)+EAB(Tn,To)=0.475+0.711=1.186mV
查表可知约为30℃
实验七变面积式电容传感器的性能
1
4.5
93
89
84
80
70
64
60
55
V=-9.782*x+93.91
灵敏度为9.782
(1)如果往上旋动测微器,使梁的自由端往上产生位移,结果有会怎样。
变化相同的x值时,V值会大约是原值的相反数
(2)实验仪的电容传感器的介质是什么,如果改变介质,将会对电容传感器性能有何影响。
原介质为空气
改变介质,由
可知,C变大,又由Q=CU,可知,此时ΔU变小,即传感器灵敏度降低。
实验八差动变面积式电容传感器的性能
-98
-79
-60
-42
-22
-3
34
9
79
95
V=19.28*X-98.95
灵敏度为19.28
结合电容变换器电原理分析,为什么读数会过零。
电容变换器将电容变化变换放大为电压信号,变化量可认为成线性关系
当动片由上片的上边缘运动到下片的上边缘,上片电容的有效面积由最大到接近于零,下片电容的有效面积由接近于零到最大,所以两片电容上的电压值一个由小变大,一个由大变小,存在相等的点,即读数会过零。
实验九差动变面积式电容传感器
振动时的幅频性能
2.74
3.87
4.89
5.86
6.77
7.96
9.01
10.03
11.12
V(pp)
30.8
32.8
37.2
43.2
49.6
52.8
56.4
64.3
57.5
12.01
20.15
24.33
28.72
50.3
44.3
38.4
30.1
(1)根据实验结果,可以知道梁的自振频率大致为多少。
10HZ
(2)如果不着重调整电容片的相对位置,会有什么现象,对测量频率是否很重要。
在梁的自振频率附近时,梁振动剧烈,幅值较大,频率较高,如果未将电容片调整至大约中间位置,在振动过程中可能会碰撞到上下装置边缘,不仅会对实验结果造成影响,还极有可能损坏仪器,因此必须着重调整电容片的相对位置。
实验十压电式传感器的性能
5.741
8.897
9.597
9.823
12.50
12.69
13.51
18.25
27.21
336
900
1440
1600
2820
2560
2040
1060
580
(1)根据实验结果,可以知道梁的自振频率大致为多少。
12.40HZ
(2)试回答压电式传感器与其它传感的各自特点。
压电式传感器体积小,重量轻,刚度好,灵敏度高,稳定性好,一般具有较为理想的线性性,而且通常情况下无滞后现象。
但低频特性较差,一般适用于动态测量。
电容式传感器输入能量小,灵敏度高,精度较高,动态特性好,能量损耗小,结构简单,环境适应性好,但容易受到分布电容的影响。
电阻应变片式传感器灵敏度、精度高,性能稳定,误差小于1%;
尺寸小,重量轻,测量速度快,即可用于静态测量,又可用于动态测量;
测量范围大,变形范围从1%-2%;
适应性强,可在高温、超低温、高压、水下、强磁场以及辐射等恶劣环境下使用。
实验十三移相器单元实验
(1)根据实验结果,可以知道移相器的移相受什么影响。
受到频率的影响。
(2)移相器的放大倍数大致为多少。
大约为1倍
(3)根据移相器的电路图(见附录),分析其工作原理。
电路图中的晶体管和电容都可以起到改变相位的作用,通过改变晶体管控制信号的大小来控制移相的大小。
实验十四相敏检波器单元实验
(1)根据实验结果,可以知道相敏检波器的作用是什么。
移相器在实验线路中的作用是什么(即参考端输入波形相位的作用)。
相敏检波器具有鉴别调制信号相位和选频的作用。
移相器具有调整输入信号相位的作用。
(2)在完成第五步骤后,将示波器两根输入线分别接至相敏检波器的输入端4和附加观察端2和3,观察波形来回答相敏检波器中的整形电路的作用是什么,是将什么波转换成什么波,使得相敏检波器中的整形电路的电子开关能正常工作。
整形电路的作用是将信号进行修真或变换。
将正弦波转换成方波。
(3)当相敏检波器的输入与开关信号同相时,输出是什么极性的什么波,电压表的读数是什么极性的最大值。
输出是相同极性的正弦波,电压表读数是相反极性的最大值。
实验十一霍尔式传感器直流激励的静态位移性能
实验数据
8.2
8.4
8.6
8.8
9.0
9.2
9.4
9.6
9.8
-1.31
-0.67
0.05
0.71
1.31
1.87
2.42
2.86
3.32
10.2
11.1
12.0
4.01
4.53
4.91
可以看出,在中间位置及两侧,霍尔传感器的电势和位移量近似成线性关系,由图中可知灵敏度约为2.917,在靠近霍尔元件边缘部分,存在误差导致线性性受到影响。
结合梯度磁场分布,解释为什么霍尔片应处于环形磁铁的中间。
环形磁铁中间磁感应强度约为零,且此处在小范围内可看作匀强磁场,故Hall片应处于环形磁铁中间。
实验十二霍尔式传感器直流激励下振动时的幅频性能
5.71
6.65
7.43
8.09
8.22
8.56
8.90
9.08
10.12
Vpp(V)
1.10
1.52
2.56
5.40
6.60
7.91
7.32
5.88
2.32
11.11
13.44
1.32
0.64
8.60HZ
(2)在某一频率固定时,调节低频振荡器的幅度旋钮,改变梁的振动幅度,通过示波器读出的数据与实验十一对照,是否可以推算出梁振动时的位移距离。
不行,因为此时是一个动态过程,不能与静态过程对应。
且当振动幅度过大时将超出量程范围。
(3)试想一下,用其他方法来测梁振动时的位移距离,并与本实验结果进行比较验证。
其他方法如使用涡流传感器,电容传感器等
涡流传感器,电容传感器的线性度较差,但精度比本实验要高。
实验十五霍尔式传感器交流激励的静态位移性能
7.8
7.4
6.6
6.2
5.8
5.4
2.15
1.37
0.53
-0.31
-1.19
-1.96
-2.57
-3.05
-3.34
4.6
-3.62
-3.80
在霍尔元件边缘附近,线性性受到影响(图中仅线性拟合线性部分点),在中间部分线性良好,灵敏度约为1.918
V=1.918*X-14.4
试叙述并解释示波器上观察到的波形
相敏检波输入的波形是正弦波sin(w*t),而输出的是±
|sin(w*t)|,即只有半个正弦波
这是由于相敏检波器造成的,当输出幅值最大时移相器工作在-180°
,于是相敏检波器使运放的输出信号与一个相位相差-180°
的方波相乘,于是得到了示波器上的波形。
实验十六霍尔式传感器交流激励下振动时的幅频性能
3.21
5.85
7.34
7.63
8.31
8.85
9.96
11.68
14.69
0.384
0.720
1.68
2.48
4.28
5.04
0.960
20.08
0.284
8.85HZ
(2)在某一频率固定时,调节低频振荡器的幅度旋钮,改变梁的振动幅度,通过示波器读出的数据与实验十五对照,是否可以推算出梁振动时的位移距离。
不能,因为这是个动态过程,不能轻易与静态过程对应,且振动幅度过大时将超出量程
实验十七差动变压器式电感传感器的性能
11.50
10.50
9.50
8.50
7.50
6.50
5.50
4.50
3.50
2.50
800
600
420
240
46
200
360
530
700
860
图中零点残余电压约为46mV
经过电桥平衡网络调整后,零点残余电压最小值为23.6mV,得到较为显著的改善
(1)根据实验结果,指出线性范围。
在11.50-7.50,7.50-2.50两段均可视为线性
(2)电感中磁棒的位置由上到下,双线示波器观察到的波形相位发生怎样的变化。
波形相位由与参考波形相同变为相反。
(3)用测微器调节双平行梁位置,使示波器上观察到的差动变压器式电感传感器的输出端信号为最小,这个最小电压称作什么,由于什么原因造成。
零点残余电压。
原因包括线圈的不对称性、温漂、时漂等。
(4)指出本实验中,零点残余电压的补偿有那两个方面。
1.基波分量;
2.高次谐波
(5)示波器上观察到差动放大器输出端输出的最小信号是什么波形,这说明波形中有什么分量。
正弦波,高次谐波。
(6)是否可以采用次级补偿线路来调零,试画出次级补偿线路图。
可以,补偿线路图如左图所示
实验十八差动变压器式电感传感器
的静态位移性能
9.25
8.45
8.05
7.65
7.25
6.85
6.45
6.05
5.65
V(v)
8.73
8.13
6.56
4.33
1.95
-0.49
-2.99
-5.28
-7.14
-8.19
V=5.193*X-38.13
灵敏度约为5.193
在实验步骤5中,同时用示波器观察相敏检波器输出端输出波形,是什么波形,移相在这里的作用是什么。
输出波形为|sin(w*t)|,即均为半个正弦波
移相器的作用为改变从音频振荡器输出的0°
信号的相位使其与差动放大器输出信号的相位相同或相反。
实验十九差动螺管式电感传感器的静态位移性能
10.00
9.00
8.00
7.00
6.00
8.36
7.27
5.73
3.98
2.05
0.15
-1.70
-3.65
-5.43
-6.99
V=3.55*X-26.54
灵敏度约为3.55
本实验与实验十八比较相似,请指出它们的各自特点。
本实验是自感式位移传感器,而实验十八是互感式传感器,二者原理不完全相同。
自感式传感器结构简单,制造容易,适用于大位移测量,但灵敏度低(由灵敏度比较可知);
互感式传感器精度高,线性范围大,稳定性好,结构简单,使用方便,但频响较低。
实验二十差动螺管式电感传感器振动时的幅频性能
4.66
5.23
5.95
6.64
7.12
7.52
13.90
15.58
20.07
1.24
0.56
0.32
7.85HZ
(2)请指出差动螺线管式传感器与差动变压器式传感器的各自特点。
 升级会员
升级会员 