过程控制课程设计Word下载.docx
《过程控制课程设计Word下载.docx》由会员分享,可在线阅读,更多相关《过程控制课程设计Word下载.docx(13页珍藏版)》请在冰豆网上搜索。
检测技术与过程控制设计报告5
SIMULINK简介5
设计原理图5
系统参数6
仿真6
调节器参数整定11
检测技术与过程控制设计任务书
题目C:
某温度控制系统的MATLAB仿真
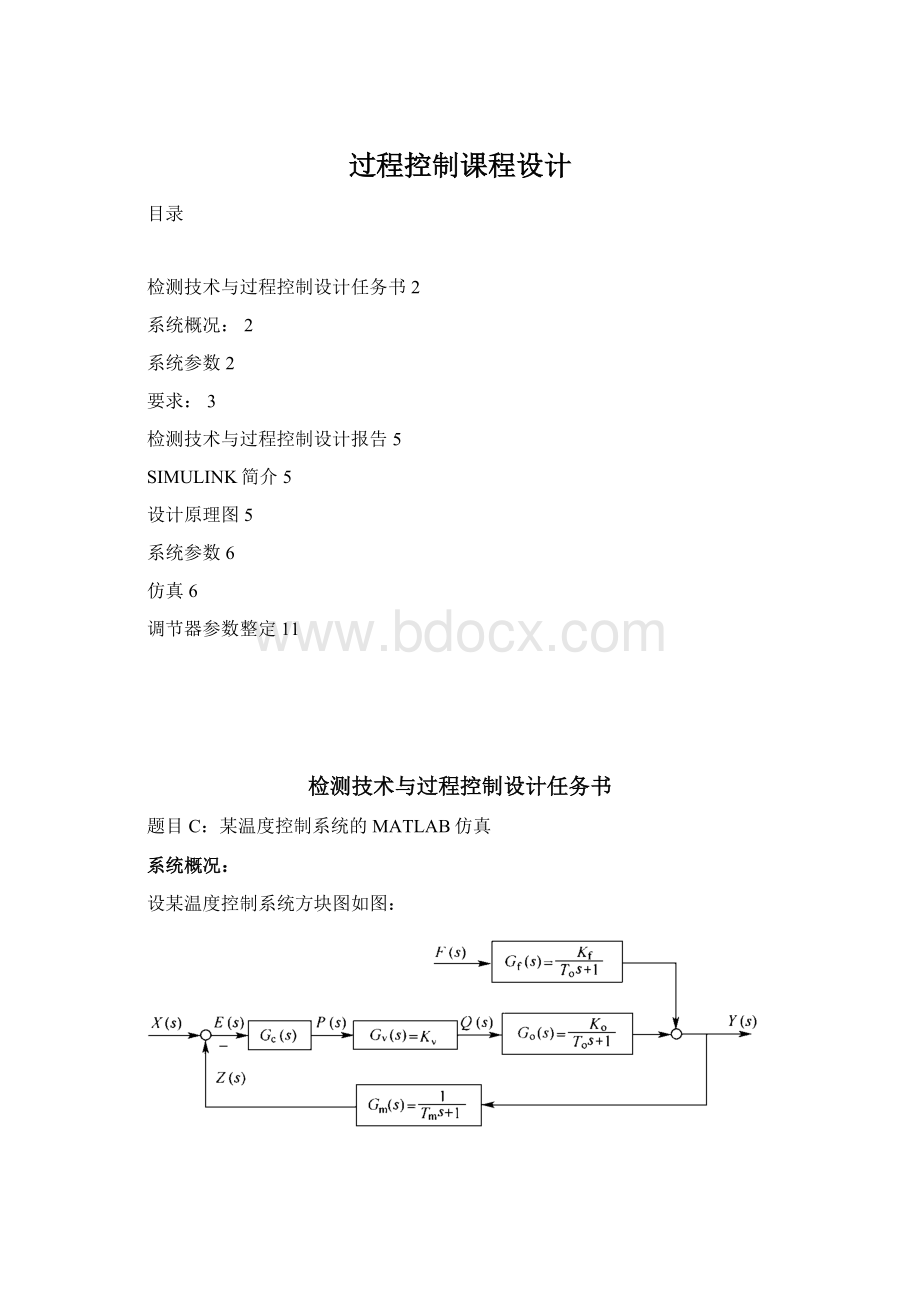
设某温度控制系统方块图如图:
图中Gc(s)、Gv(s)、Go(s)、Gm(s)、分别为调节器、执行器、过程对象及温度变送器的传递函数;
电动温度变送器测量范围(量程)为50~100OC,调节器输出信号为4~20mA。
Gf(s)为干扰通道的传递函数。
系统参数
1、验证性仿真
(1)分别建立仿真结构图,进行以下仿真,并求出主要性能指标:
①控制器为比例控制,其比例度分别为δ=10%、20%、50%、100%、200%时,系统广义对象输出z(t)的过渡过程;
②控制器为比例积分控制,其比例度δ=20%,积分时间分别为TI=1min、3min、5min、10min时,z(t)的过渡过程;
③控制器为比例积分微分控制,其比例度δ=10%,积分时间TI=5min,微分时间TD=0.2min时,z(t)的过渡过程。
(2)对以上仿真结果进行分析比对,得出结论。
2、调节器参数整定
分别针对PI、PID控制规律,采用稳定边界法,基于MATLAB仿真整定调节器
3、撰写设计报告。
【注】:
调节器比例带δ的说明
比例控制规律的输出p(t)与输入偏差信号e(t)之间的关系为
式中,Kc叫作控制器的比例系数。
在过程控制仪表中,一般用比例度δ来表示比例控制作用的强弱。
比例度δ定义为
式中,(zmax-zmin)为控制器输入信号的变化范围,即量程;
(pmax-pmin)为控制器输出信号的变化范围。
检测技术与过程控制设计报告
SIMULINK简介
SIMULINK是MATLAB下的一个用来对动态系统进行建模、仿真和分析的软件包。
它支持连续、离散、及两者混合的线性和非线性系统,同时也支持具有不同部分拥有不同采样率的多种采样速率的系统仿真。
并能直观、快速地分析系统的动态和稳态性能,还可灵活的改变系统的结构和参数,通过快速、直观的仿真达到系统的优化设计。
SIMULINK拥有信号源、接收、连续系统、离散系统、数学运算等十几个模块库,这些模块库中的模块可直接使用,按系统各部分相互连接组成系统的仿真模型。
设计原理图
温度控制系统方块图
仿真
验证性仿真一
控制器为比例控制,其比例度分别为δ=10%、20%、50%、100%、200%时,系统广义对象输出z(t)的过渡过程;
结论:
从图中可以看出,随着比例度的增大,系统曲线的震荡性减弱,对输入的反应速度明显降低。
但就比例环节来说,它对误差的反应速度比较快,有误差才会发挥比例环节的特点。
验证性仿真二
控制器为比例积分控制,其比例度δ=20%,积分时间分别为TI=1min、3min、5min、10min时,z(t)的过渡过程;
比例度确定,随着积分时间的增大,系统过渡过程时间减小,震荡性减弱。
相比较比例环节,系统输出更容易控制。
积分环节主要起到消除余差,是控制系统中使用较为广泛的控制规律。
验证性仿真三
控制器为比例积分微分控制,其比例度δ=10%,积分时间TI=5min,微分时间TD=0.2min时,z(t)的过渡过程。
比例积分微分可以消除余差,微分作用可以提供系统的稳定性,它适用于控制通道时间常数或容量滞后较大、控制要求较高的场合。
但比例积分微分的控制作用必须在一定条件下才可以使用,并不是所有的控制规律都可以选择比例积分微分控制。
调节器参数整定
PID参数整定步骤:
(1)将调节器积分时间设定为无穷大、微分时间设定为零(即Ti=∞,Td=0),比例度适当取值,调节系统按纯比例作用投入。
稳定后,适当减小比例度,在外界干扰作用下,观察过程变化情况,寻取系统等幅振荡临界状态,得到临界参数。
(2)根据临界比例度δk和为临界周期Tk,按下表计算出调节器参数整定值
调节规律
调节器参数
比例度δ,单位:
%
积分时间Ti,单位:
min
微分时间Td,单位:
P
2×
δk
---
PI
2.2×
0.85×
Tk
PID
1.7×
0.5×
0.125×
临界比例度法PID参数整定经验公式
(3)将计算所得的调节器参数输入调节器后再次运行调节系统,观察过程变化情况。
多数情况下系统均能稳定运行状态,如果还未达到理想控制状态,进需要对参数微调即可。
整定后参数如下表所示:
比例积分环节:
δk:
9.8%;
Tk1.2min3,5min6min11,9min
比例积分微分调节:
 升级会员
升级会员 