晶体管振荡器课程设计Word格式文档下载.docx
《晶体管振荡器课程设计Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《晶体管振荡器课程设计Word格式文档下载.docx(11页珍藏版)》请在冰豆网上搜索。
用s=j
带入就得到稳态下的传输系数和环路增益。
由式(1—5)可知,若在某一频率
1上T(j
),Ku(j
)将趋近于无穷大,这表明即使没有外加信号,也可以维持振荡输出。
因此自激振荡的条件就是环路增益为1,即
T(j
)=K(j
)F((j
)=1(1.2.7)
通常称为振荡器的平衡条件。
由式(1—6)还可知|T(j
)|>
1,|
|>
|Ui(j
)|,形成增幅振荡。
|T(j
)|<
1,|
|<
)|,形成减幅振荡。
综上,正弦波振荡器的平衡条件为:
T(j
)=1
也可表示为
)|=KF=1(1.2.8a)
K+
F=2n
(n=0,1,2,3…)(1.2.8b)
式(1.2.8a)和(1.2.8b)分别称为振幅平衡条件和相位平衡条件。
振幅起振条件:
)|=KF>
1(1.2.9)
相位起振条件:
=
F=2nπ(n=0,1,2…)(1.2.10)
稳定条件:
振幅稳定条件:
|Ui=UiA<
0(1.2.11)
相位稳定条件:
|Ui=UiA<
0(1.2.12)
2.频率稳定度
振荡器的频率稳定度是极重要的技术指标。
因为通信设备,电子测量仪器等的频率是否稳定,取决于这些设备中的主振荡器频率稳定度。
在工程应用中,要求正弦波振荡电路的振荡频率有一定的稳定度,有必要引用频率稳定度来作为衡量振荡电路的质量指标之一。
频率稳定度一般用频率的相对变化量△f/f0来表示,f0为振荡频率,△f为频率偏移。
频率稳定度有时附加时间条件,如一小时或一日内的频率相对变化量
频率稳定度的定量表示法通常建立在大量测量的基础上的统计值来表征,较为合理。
经常采用的方法之一是均方值法,它是用在指定时间间隔内,测得各频率准确度与其平均值的偏差的均方根值来表征的,即
σn=
(2.2.1)
式中,n为测量单位;
为第i次所测得的相对频率稳定度;
为n个测量数据的平均值;
实际工作中对于不同制式、不同频率、不同用途的各种无线电设备,其频率稳定度的要求也不同。
各振荡电路频率特性如图2.1
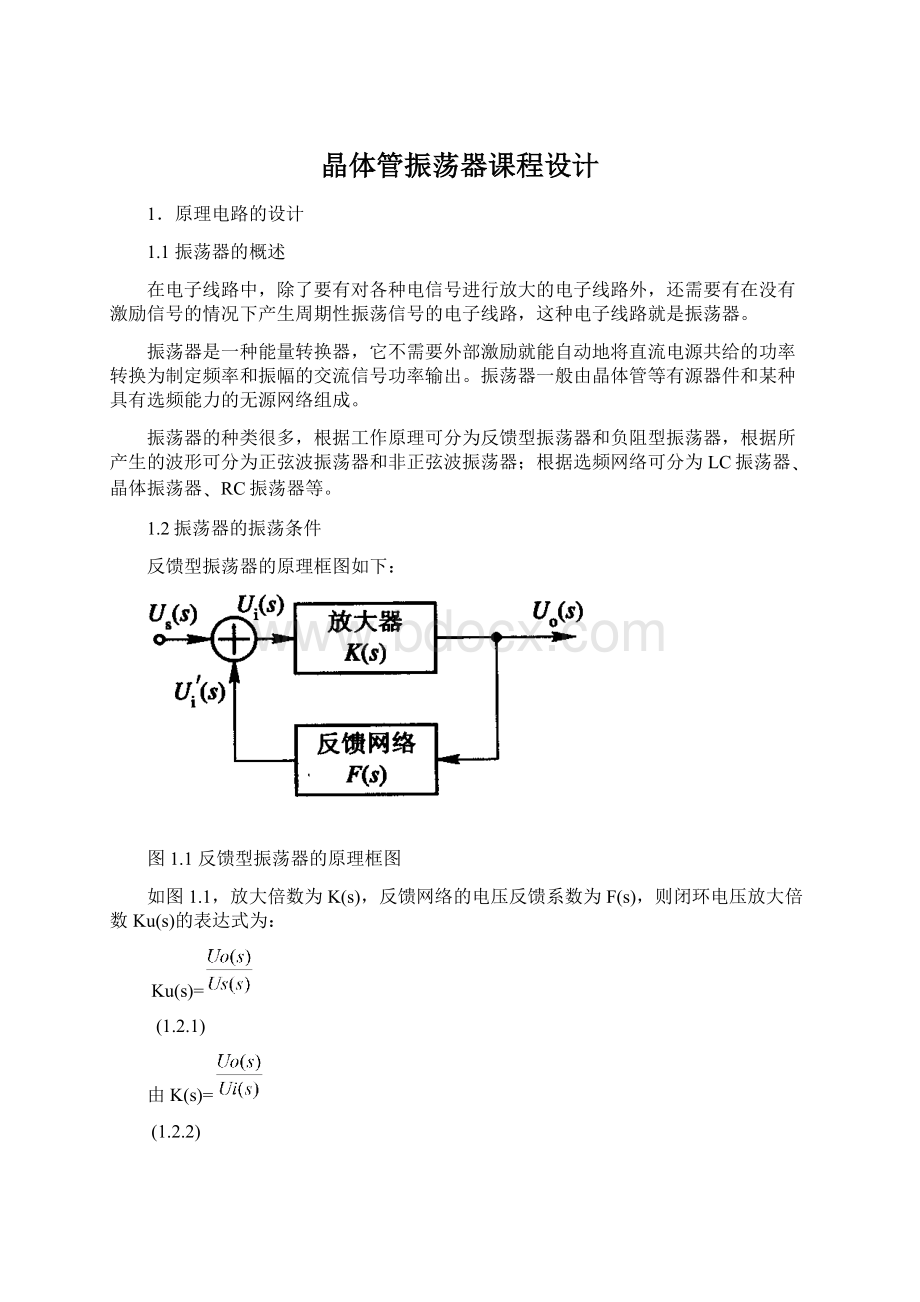
振荡器
频率范围
频率稳定度
(短期)
说明
RC
几HZ——几百KHZ
10-2——10-3
电路简单,体积小,频率低
LC
几百KHZ——几十MHZ
10-3——10-4
频率高,频率稳定度低
克拉泼电路
西勒电路
几MHZ——近千MHZ
10-4——10-5
电路简单,频率高且稳定振荡波形较好
图2.1振荡电路频率特性
3.方案的确定
3.1方案一:
RC振荡电路
根据RC震荡网路的不同形式,可以分为RC相移振荡器和文式电桥振荡器两大类,一般用于产生低频信号。
在需要产生较低的震荡频率是,从理论上讲,可以采用LC振荡器。
但实际中,由于这时需要采用大的电感L和电容C,有时还需要用带心的线圈,构造笨重,需用材料多,价格贵。
而且制造损耗小的大电感与大电容比较困难,回路元件体积大,安装调试均不方便。
因此较低的震荡频率一般都采用RC振荡器来产生。
RC振荡器的主要优点:
构造教简单,经济方便。
RC振荡器的工作原理也是有放大器和正反馈网路两部分所构成,因此RC振荡器也必须满足振幅和相位的平衡条件:
AF=1(3.1.1)
Φa+Φf=2nπ(n=1,2,3,4,…)(3.1.1)
3.2方案二:
LC选频放大电路
基本电路就是通常所说的三端式(又称三点式)的振荡器,即LC回路的三个端点与晶体管的三个电极分别连接而成的电路,如图所示。
图3.1三端式振荡器的组成
根据谐振回路的性质,谐振时回路应呈纯电阻性,因而有
X1+X2+X3=0(3.2.1)
另外,为了满足V0与Vi相位相差180o的条件,X1与X2为同一性质的电抗。
也就是说,它们或者同为电感元件或者同为电容元件,因此X3必须为另一性质的电抗。
由此可以得出三端式振荡器的构成法则是:
X1与X2的符号必须相同,X3的符号必须相反。
凡是违反这一规则的电路都不能产生振荡。
LC振荡器按其反馈网络的不同,可分为互感耦合振荡器、电感反馈式振荡器和电容反馈式振荡器三种类型。
3.2.1互感耦合振荡器
互感耦合振荡器是依靠线圈之间的互感耦合实现正反馈的,耦合线圈同名端的正确位置的放置,选择合适的耦合量M,使之满足振幅起振条件很重要。
互感耦合振荡器有三种形式:
调基电路、调集电路和调发电路,这是根据振荡回路是在集电极电路、基极电路和发射极电路来区分的。
图3.2调基电路振荡器
调基电路振荡频率在较宽的范围改变时,振幅比较平衡。
由于基极和发射极之间的输入阻抗比较低,为了避免过多地影响回路的Q值,故在调基和调发这两个电路中,晶体管与振荡回路作部分耦合。
图3.2调集电路振荡器
调集电路在高频输出方面比其它两种电路稳定,而且幅度较大,谐波成分较小。
图3..3调发电路振荡器
互感耦合振荡器在调整反馈(改变M)时,基本上不影响振荡频率。
但由于分布电容的存在,在频率较高时,难于做出稳定性高的变压器。
因此,它们的工作频率不宜过高,一般应用于中、短波波段。
3.2.2电感反馈三端式LC振荡(哈特莱电路)
图3.4电感反馈式振荡电路
哈特莱电路的优点:
1、L1、L2之间有互感,反馈较强,容易起震
2、振荡频率调节方便,只要调整电容C的大小即可。
3、而且C的改变基本上不影响电路的反馈系数。
电路的缺点:
1振荡波形不好,因为反馈电压是在电感上获得,而电感对高次谐波呈高阻抗,因此对高次谐波的反馈较强,使波形失真大;
2电感反馈三端电路的振荡频率不能做得太高,这是因为频率太
小且分布参数的影响太大。
3.2.3电容反馈三端振荡器(考毕兹电路)
图3.5电容反馈三端振荡器
考毕兹电路的优点:
1、电容反馈三端电路的优点是振荡波形好。
2、电路的频率稳定度较高,适当加大回路的电容量,就可以减小不稳定因素对振荡频率的影响。
3、电容三端电路的工作频率可以做得较高,可直接利用振荡管的输出、输入电容作为回路的振荡电容。
它的工作频率可做到几十MHz到几百MHz的甚高频波段范围。
调C1或C2来改变振荡频率时,反馈系数也将改变。
但只要在L两端并上一个可变电容器,并令C1与C2为固定电容,则在调整频率时,基本上不会影响反馈系数。
3.3最终方案:
3.3.1电路原理图:
由上我们可以看出RC和LC振荡电路的原理是基本相同的,不同的一点是RC振荡电路常用来产生30HZ—300KHZ的范围内的低频信号,而LC振荡电路常用来产生1M以上的高频信号,本次课程设计的技术指标是12MHZ的振荡器,属于高频范围,所以应选择LC振荡器。
再比较三种LC振荡器的优缺点,我们可以发现电容反馈三端振荡器可以产生波失真小,输出频率高并且稳定的波形。
所以电容反馈三端振荡器为最终的确定的电路。
并且选取电容三点式的改进型电路,即克拉泼振荡器。
其电路图如下:
图3.6克拉泼振荡器
3.3.2克拉泼电路与频率稳定度:
如图3.6中,C1>
>
C3,C2>
C3,Cb为基极耦合电容。
C3为可变电容,它的作用是把L与C1、C2分隔开,使反馈系数仅仅取决于C1、C2的比值,振荡器频率基本上有L、C3决定,这样,C3就减弱了晶体管与振荡电路之间的耦合,是这算到回路的有源器件参数减小,提高了频率稳定度。
另一方面,不稳定度电容则于C1、C3并联,基本上不影响震荡频率。
C越小,则频率稳定度越好,但起振也越困难。
因此,C3不能无限制的减小。
4.电路参数的确定
4.1晶体管的选择:
从频率的角度出发,应选择fT较高的晶体管,这样的晶体管内部相移较小。
通常选择fT>
(3~10)f1max。
同时希望电流放大系数
大些,这样即容易振荡,也便于减小晶体管喝回路之间的耦合。
虽然不要求振荡器中晶体管输出多大的功率,但考虑到稳频等因素,晶体管的管功率应该留有足够的余量。
4.2直流馈电线路的选择
为保证振荡器起振的振幅条件,起始工作点应设置在线性放大区;
从稳频出发,稳定状态应该在截止区而不应该在饱和区,否则回路的有载品质因数QL将会下降。
所以,通常应将晶体管的静态偏置点设置在小电流区,电路采用自偏压。
对于小功率晶体管,集电极静态电流约为1~4mA。
4.3振荡回路元件的选择
从稳频出发,振荡回路中电容C应该尽可能大,但C过大不利于波段工作;
电感L也应尽可能大,但L过大后,体积大,分布电容大,L过小回路的品质因数过小。
因此应合理的选择C,L。
在短波范围,C一般取几十至几百皮发,L一般取0.1至几十微亨。
4.4反馈回路元件的选择
为了保证振荡器有一定的稳定振幅以及容易起振,在静态工作点应该选择
YfRL
=3~5
当静态工作点确定后,Yf的值就一定,对于小功率晶体管课近似认为
Yf=gm=
反馈系数的大小应在下列范围内选择
F=0.1~0.5
根据上述内容,再结合工程上一些元器件的标称值,先确定R1、R2、Rc、Re的值分别为:
24K
、56K
、3K
、1K
。
根据克拉泼振荡器振荡频率公式:
1≈
0==
要使振荡器的速出频率f=12MHZ
取L=1
C3=174pF
要使C1、C2>
C3,F=0.1~0.5
取C1=1000PFC2=2000PF
5.收获、体会和建议
为期一周的课程设计结束了,通过这次设计让我更好的掌握了常用元件的识别和测试;
熟悉了元件的结构及掌握了各元件的工作原理和其具体的使用方法。
更加深刻地理解课本知识。
在此次做课程设计的过程中,我深深地感受到了自己所学到知识的有限和自身的不足,以及理论和实践的巨大差距。
另外通过课程设计我更进一步地熟悉了晶体管的应用,巩固了模数电和电路方面的知识,起到了温故知新的作用,此外我还学会了两种电路设计和Protel的使用,这真是一大收获。
最重要的是:
在这次课程设计这个过程中,通过自己的摸索和与同学们的交流,我攻克了许多难题一步一步地学会了各种软件的使用,这让我深刻体会了独立思考和与人合作的重要性,在以后的学习工作中必须要加强这两种能力。
通过这次课程设计,我想说:
为完成这次课程设计我们确实很辛苦,但苦中仍有乐,和自己的这一星期一起面对,和同学们一起忙碌的日子,让我们相互帮助,多少人间欢乐在这里洒下。
对我而言,知识上的收获重要,精神上的丰收更加可喜。
让我知道了学无止境的道理。
我们每一个人永远不能满足于现有的成就,人生就像在爬山,一座山峰的后面还有更高的山峰在等着你。
挫折是一份财富,经历是一份拥有。
这次课程设计将成为我人生旅途上一个非常美好的回忆!
最后,我要感谢我的高频老师,谢谢老师这一学期来对我的教导。
6.元件清单
元件序号
型号
主要参数
数量
R1
56K
1
R2
Rc
3K
Re
1K
C1
1000pF
C2
2000pF
C3
174pF
Cb
1nF
L
10uH
V
2N2222A
75V0.6A0.625W
参考文献
[1]曾兴雯等,高频电路原理与分析.西安电子科技大学出版社,2004.01
[2]康华光,电子技术基础模拟部分.高等教育出版社,2006.01
[3]张肃文,高频电子线路[M].高等教育出版社,2007.11
[4]贾新章等,电子电路CAD技术----基于OrCAD9.2.西安电子科技大学出版社,2002
[5]贾新章等,OrCAD/CaptureCIS9实用教程.西安电子科技大学出版社,2000
[6]吉雷,Protel99从入门到精通.西安电子科技大学出版社,2000.10
 升级会员
升级会员 