国际电信联盟ITUWord格式.docx
《国际电信联盟ITUWord格式.docx》由会员分享,可在线阅读,更多相关《国际电信联盟ITUWord格式.docx(18页珍藏版)》请在冰豆网上搜索。
r)某些星载合成孔径雷达会对工作在420-450MHz频段内的机载和船载雷达造成潜在的不可接受的
干扰,干扰的可能性和严重性高度取决于合成孔径雷达的特性;
s)即使是很短的持续时间,合成孔径雷达对运载火箭接受安全自毁指令的接收机造成的任何有害干
扰都会危及生命和财产的安全;
t)卫星地球探测业务EESS(有源)工作在较低频率时传感器实现复杂,很少有这种平台同时工作在
轨道上。
建议
1在420-470MHz频段内,现有的星载有源遥感器如果工作在业余业务、卫星业余业务、固定业务、无线电定位、空间操作、移动业务和卫星移动业务所使用的频段,应遵守本建议书附件1中的技术和操作限制条件;
2对于工作频率在420-450MHz之间的现有星载有源遥感器,除非为了确认符合受影响的主管部门之间达成的协议而逐例进行了深入分析,考虑了雷达接收机在处理无用合成孔径雷达信号时的影响,并且尽可能进行了现场测试,否则不应在表2所列地面空中目标跟踪雷达的视线内投入工作;
3工作在420-450MHz频段内星载合成孔径雷达应被设计为可以承受被地面空中目标跟踪雷达跟踪时产生的无用信号功率电平;
4在420-432MHz和438-450MHz频段内,为保证星载合成孔径雷达和风廓线雷达能正常工作,两者在频率和空间上都应保持相当的间隔;
5星载有源传感器的频段是通过这样一种方法选出的,就是不能与考虑到h)中所列出的运载火箭接受安全自毁指令接收频段相重叠;
6如果建议5难以实施,工作在已划分给运载运载火箭接受安全自毁指令接收频段的频率范围内的
星载有源传感器,在距运载火箭指令使用地点的特定距离内是不能进行操作的,以避免来自星载有源传感器的干扰进入运载火箭接收机。
附件1
工作在420-470MHz频段内卫星地球探测业务(有源)的
技术和操作限制条件
为了保护工作在现有业务中无线电台(站),在420-470MHz频段内的卫星地球探测业务(EESS)(有源)所用的合成孔径雷达的发射应该满足本附件中的技术和操作限制条件。
下面的限制条件以ITU-R的研究为基础。
附件2则提供了星载有源遥感器和其他无线电业务在420-470
MHz频段内共用可行性的资料。
1技术要求
表1
在420-470MHz频段内EESS有(源)仪器的技术限制条件
参数
值
天线主瓣方向在地表的功率通量密度峰值
140dB(W/(m2·
Hz))
天线主瓣方向在地表的最大平均功率通量密度
150dB(W/(m2·
天线第一旁瓣方向在地表的最大平均功率通量密度
170dB(W/(m2·
2操作限制条件
对于工作在420-450MHz频段内的EESS(有源),除非为了确认兼容性进行了深入分析,考虑了雷达接收机在处理无用合成孔径雷达信号时的影响,并且尽可能进行了现场测试,否则不应在表2所列地面空中目标跟踪雷达视线内发射信号。
由于上面的限制条件,设计EESS(有源)仪器时,在国际电联的规则或者国家规则不允许其工作的
地理地区或国家,应能实现程序关闭所有的射频发射。
EESS(有源)仪器的工作性能应该是以探测活动为导向的,目标指向特定的地理区域,并应将仪器的有源发射时间限制为探测目标所需的最短时间。
因此,由仪器实施的测量不需该仪器连续工作,可以预计对同一地区的连续测量会间隔几个月。
80
60
40
20
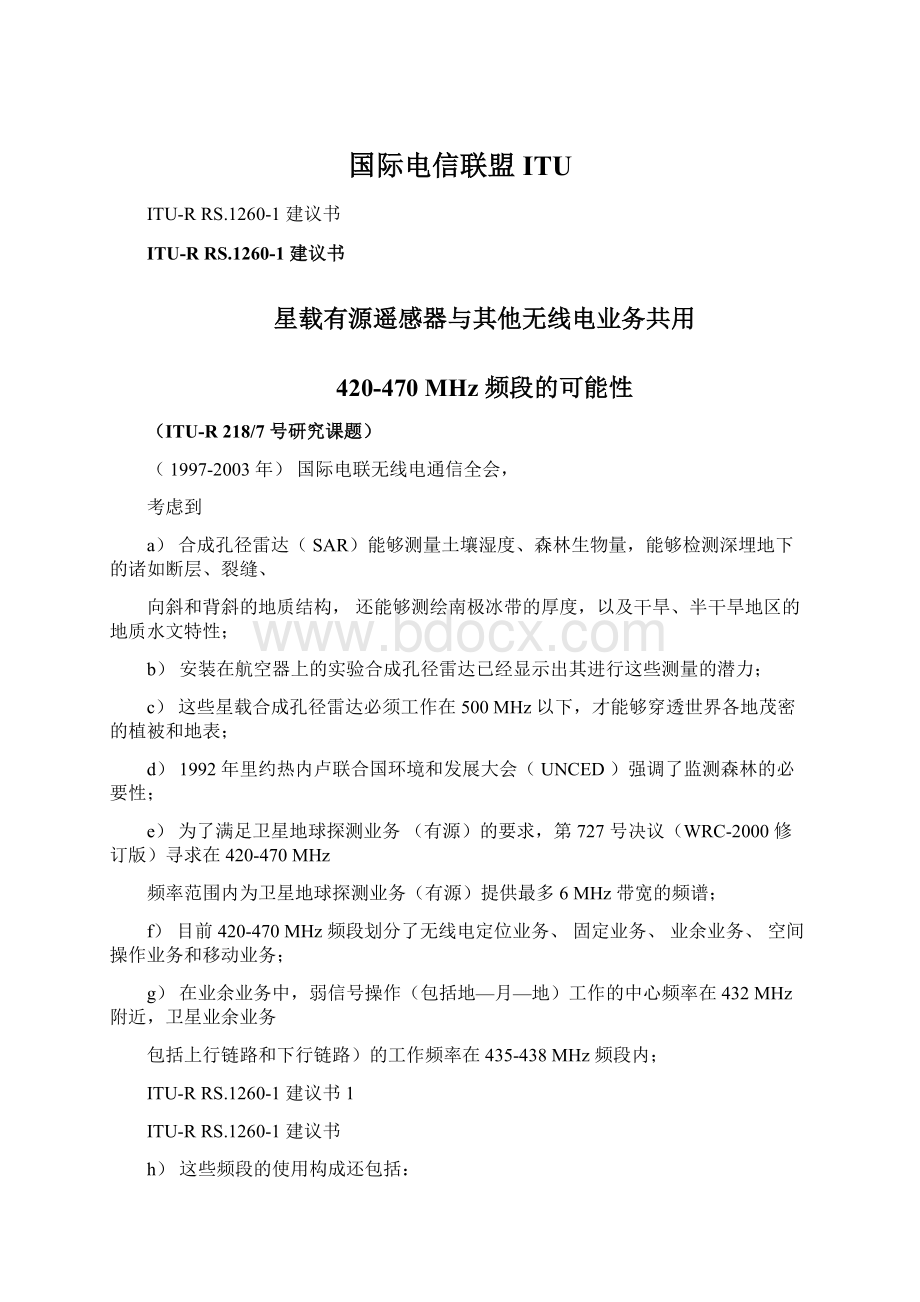
图1
550km轨道上合成孔径雷达在地面空中目标跟踪雷达周围禁入区举例
–160–140–120–100–80–60–40–20020406080100120140160
1260-01
表2
工作在430-440MHz频段的空中目标跟踪雷达
雷达位置
纬度
经度
马萨诸塞(美国)
北纬41.8o
西经70.5o
德克萨斯(美国)
北纬31.0o
西经100.6o
加利福尼亚(美国)
北纬39.1o
西经121.5o
佐治亚(美国)
北纬32.6o
西经83.6o
佛罗里达(美国)
北纬30.6o
西经86.2o
北达科他(美国)
北纬48.7o
西经97.9o
阿拉斯加(美国)
北纬64.3o
西经149.2o
图勒(格陵兰岛)
北纬76.6o
西经68.3o
FylingdalesMoor(英国)
北纬54.5o
西经0.4o
皮林奇利克(土耳其)
RS.1260-1建议书5
北纬37.9o
东经40.0o
ITU-R
3在420-470MHz频段内现有无线电业务的保护标准
本节中涉及的保护标准并非全部都包括在ITU-R建议书内。
其中有些保护标准源自ITU-R的研究报告。
ITU-R研究报告的数值
表3反映的是本建议书形成期间能够获得的资料。
应注意,今后描述任何给定业务保护标准的任何建议书,应在表中列出的源自之前优先考虑。
表3
420-470MHz范围内无线电业务的保护标准
频段范围
(MHz)
ITU-R业务
第4和5栏标准所应用的地理地区
超越标准的最大时间百分比
(1)
接收电台的干扰标准
来源
430-440
业余
考虑到l)中规定区域的地面业余无线电台的视距范围内
1%
pfd=
204dB(W/(m2·
Hz))
(2)
ITU-R研究报告
435-438
卫星业余
考虑到l)中规定区域的业余卫星地球站的视距范围内
2
197dB(W/(m2·
业余空间电台接收机的
视距范围内
187dB(W/(m2·
(3)
420-470
固定
包括考虑到m)中规定区域的电台在内的固定业务电台的视距范围内
不可用
(I/N)MEAN=–20dB(等效于1%性能损失)
ITU-RF.758和
ITU-RF.1108建议书
420-432和
438-450
无线电
定位
风廓线雷达的视距范
围内
(4)
(I/N)PEAK=6dB
ITU-RM.1462建议书
420-450
空间操作
考虑到m)中规定区域的运载火箭接受安全自毁指令接收机的视距范围内
需要频率或空间的隔离
6
表3(完)
频率范围
第4和5栏标准所应用的地理地区
地面空中目标跟踪雷达的
视距范围内(5)
(I/N)PEAK=6dB
船载雷达的视距内
机载雷达的视距内
(I/N)PEAK=6dB
移动通信
考虑到m)中规定区域的移动电台的视距内
0.1%
2
(2)
1)应考虑工作在频率范围内的所有有源合成孔径雷达。
2)在430-440MHz频段内规定的最大集总功率通量密度是基于业余无线电接收天线平均旁瓣所接收到的最大允许干扰电平的。
3)
3)只有脚注内的一些国家才将430-440MHz频率范围划分给固定和移动业务。
4)ITU-RM.1462建议书中的标准是基于保护无线电定位系统免受类似于噪声的干扰。
通过使用信号处理技术将无用脉冲发射滤除,即使干扰电平大于ITU-RM.146建议书中的值,无线电定位系统和星载有源遥感器也可能在该频段内共用。
ITU-RM.1372建议书对一些此类干扰抑制技术做了描述。
5)工作频率在420-450MHz之间的卫星地球探测业务(有源),除非为了确认符合受影响的主管部门之间达成的协议而逐例进行了深入分析,考虑了雷达接收机在处理无用合成孔径雷达信号时的影响,并且尽可能进行了现场测试,否则不应在表2所列地面空中目标跟踪雷达的视距范围内投入工作。
附件2
干扰的评估和减缓的方法
1引言
本附件中介绍的方法可以对在共用频段的情况下,工作在420-470MHz频段内的其他业务是否会因接收到星载有源遥感器的无用信号而导致工做出现问题做出估计。
另外本附件中的很多内容摘自ITU-RSA.1280建议书《为减缓对工作在1-10GHz频段内地面雷达的潜在干扰星载有源遥感器发射特性的选择》的附件1。
这些计算强调了为改善共用状况可以选择的若干传感器参数。
ITU-RRS.1260-1建议书7
2对其他业务的干扰计算
其他业务接收到的来自星载有源遥感器的平均干扰信号的功率通量密度Ipfd(dB(W/(m2·
Hz)))
和平均干扰信号功率电平I(dBW),可由下式计算得到:
Ipfd10logPt10log(PRF)Gt–(130.9920logR10logB)OTR–PG(1a)
I10logPt10log(PRF)GtGr–(32.4420log(fR))OTR–PG(1b)
式中:
Pt:
星载有源遥感器峰值发射功率(W)
:
星载有源遥感器脉冲宽度(s)
PRF:
星载有源遥感器脉冲重复频率(Hz)
Gt:
星载有源遥感器相对于其他业务方向上的天线增益(dBi)
R:
传感器和雷达的斜线距离(km)
B:
传感器带宽(MHz)
OTR:
接收机调谐抑制度(dB)
PG:
处理增益(dB),由于接收机的信号处理对干扰信号的抑制度(如未知就假设为0)
f:
频率(MHz)。
方程(1a)可计算得到平均干扰信号的功率通量密度,(1b)则能计算平均干扰信号的功率电平。
只有
在能够确定情况适当时才使用平均干扰信号功率电平。
例如,雷达对接收信号做快速傅里叶变换(FFT)通
过大量的二进制处理会将不同的脉冲信号均衡,以得到平均干扰信号电平。
带内抑制项可由下面计算得到:
OTR10log(Br/Bt)如BrBt(2a)
0如BrBt(2b)
Br:
接收机带宽
Bt:
干扰信号发射带宽
如果干扰信号峰值更起作用,那么方程
(1)的第2项应该去掉,而带内抑制项可由下式计算得到:
没有频率调制的输入脉冲:
OTR20log(Br)如Br1(3a)
Br:
其他业务使用接收机的中频段宽
Bc:
星载有源遥感器的线性带宽
传感器脉冲宽度
频率调制后的输入脉冲
3其他业务的干扰标准
表1列出了其他业务的特定系统的特定标准,是以接收站处的最大总功率通量密度限值(dB(W/
m2·
Hz)))和超越此限值的最大时间百分比来讲的。
另外有些例子可以采用下面介绍的不同标准。
3.1无线电定位业务中的警戒雷达假设警戒雷达接收信噪比在长于单次扫描时间时(按10秒计算)的恶化不会超过0.5dB。
这等效于接收机中频部分干扰噪声功率比I/N为-9dB。
那么对于警戒雷达,其更关注的是平均干扰信号的功率电平。
3.2无线电定位业务中的跟踪雷达
跟踪雷达经常使用“距离闸”来阻止特定距离目标外的回波。
因此在确定跟踪雷达对干扰脉冲序列敏感度的一个重要考虑是与距离闸重合的干扰脉冲分量。
而干扰脉冲与距离闸的重合度取决于有用信号的PRF和
干扰信号的PRF是否整数倍相关(是为情况1,否为情况2),重合脉冲分量可以从下面的式子中得到:
PRFi:
PRFg:
GCF(PRFi,PRF)g:
i:
g:
ITU-RRS.1260-1建议书9
干扰PRF
门PRF
PRFi和PRFg的最大公因子干扰脉冲宽度
闸宽
10
注意当ig而且有用信号的PRF和干扰信号的PRF不是以整数倍相关(情况2),fc近似等于干扰脉冲的工作周期。
这种情况被视为典型情况,可以用来确定跟踪雷达的恶化门限。
为了得到关心目标的高精度位置信息,跟踪雷达可以使用主波束很窄的高增益天线。
伺服系统是由天线瞄准目标时的角度误差所产生的误差信号来驱动的,因此此系统可以使天线的主波束始终对准目标。
干扰信号进入雷达则会增加偏差。
a=1.1允许增加0.1%或
a:
总跟踪误差及由干扰导致的恶化的因数(例如,由于干扰的存在,
10%)
雷达中频滤波器的3dB带宽
目标脉冲的长度(对跟踪雷达来说,Br1)
S/I:
雷达中频输出信噪比S/I(dB)。
图2是脉冲重合分量与雷达中频输出的信噪比S/I关系的图表,允许由干扰引起的10%的跟踪误差的增长。
脉冲重合分量近似等于传感器工作周期(6%),因此13dB的信噪比对应于10%的跟踪误差。
假
设信噪比S/I必须在超过3秒的时间内13dB。
由于干扰标准是基于干扰脉冲与距离闸重合所形成的,因此这一标准必须以干扰信号峰值功率为指标。
10ITU-RRS.1260-1建议书
11
图2
雷达信噪比与脉冲重合分量的函数关系
(10%的跟踪误差增长)
4举例分析星载有源遥感器对其他业务的干扰
4.1技术特性
4.1.1星载有源遥感器
表4给出的具有代表性的在后面分析中会用到的星载有源遥感器技术特性。
表4
星载合成孔径雷达1(SAR1)的特性
轨道高度(千米)
750
轨道倾斜角(度)
98.4
峰值射频发射功率(瓦)
400
平均射频发射功率(瓦)
4.4
脉冲宽度(微秒)
50
PRF(赫兹)
2200
脉冲调制
线性调频
脉冲带宽(MHz)
4.8
天线峰值增益(dB)
27.9
天线方向角(度)
37(相对于天顶角)
天线第1旁瓣(dB)
–17.6(相对于峰值)
天线第5旁瓣(dB)
–34(相对于峰值)
12
4.1.2机载雷达
ITU-RM.1462建议书描述了工作在420-450MHz频段的雷达特性和保护标准。
通过前面的分析,可以得出这样的结论:
星载有源遥感器在技术上与高灵敏度地面空中目标跟踪雷达不能兼容。
通过计算机仿真可以分析星载合成孔径雷达和机载雷达在这一频段是否兼容。
与此类似,可以得到船载雷达与空间雷达的兼容性结论。
本建议书的草稿修订版本列出了带宽为1MHz,增益为22dBi的平面阵列天线的机载雷达。
为了便于分析,假设天线是从0o仰角的方位上开始扫描的。
此类雷达的保护标准是干
扰噪声功率比不超过–6dB。
4.2
分析方法和结论
4.2.1
计算机仿真
4.2.1.1
处理增益
星载合成孔径雷达对无线电定位业务的潜在干扰分析假设没有增益处理(也就是说,能够通过接收机的信号处理抑制干扰)。
对于无线电定位系统来说,检查接收机对脉冲干扰信号(如来自合成孔径雷达的信号)的潜在响应是合适的。
雷达抗脉冲干扰信号的技术细节通常是不公布的。
然而,许多现代的雷达接收机,特别是那些需要在非常混乱环境里执行警戒任务的,它们能从混乱的背景中通过数字多普勒处理来解析目标。
对脉冲干扰信号进行傅里叶变换其效果相当于通过邻近的区域/多普勒二进制处理将脉冲峰值功率均衡,从而产生干扰功
率均化的效果。
4.2.1.2雷达干扰标准
I/N=6dB是ITU-RM.1462建议书中规定的机载雷达保护标准。
干扰功率在任何时刻和持续时间内都不能超过这个值。
特别是对于那些分析中用到的警戒雷达如机载雷达,即使在允许的时间百分数内干扰功率超过该值也是不能使用此概念的。
可以将数据丢失或者容许目标丢失的概念应用于通信链路或传感器系统,但目标检测(基本和关键的雷达系统功能)在时间上是实时的,长期的丢失目标关系不大。
一个被用在ITU-R中很多类似的分析方法,就是检验仿真结果,此方法假设警戒雷达在超过单个天线扫描周期的时段内性能不会下降。
这意味着,在其他方式下可以成功完成探测的第一个扫描周期内,目标可能不会被发现。
在此分析中,机载雷达的天线旋转时间以10s为一周期。
这样的话,对超过10s时干
13
扰与噪声比不应大于–6dB(基于此假设,在没有干扰的情况下,一个运动速度为800km/h的物体在探测
到之后又移动了大约2km是应该发生的,这种假设是否能被接受取决于具体的情况)。
由检验仿真结果用到达雷达的干扰信号峰值和平均功率)可知,星载合成孔径雷达和机载雷达很难在此频段内共用。
4.2.1.3计算机仿真结果
使用合成孔径雷达1模型(见表5)进行仿真。
表6给出了在预期的星载合成孔径雷达1对无线电定位业务系统的干扰环境下计算机仿真结果。
所有的仿真都是以2秒的时间步进60天的周期进行的。
请注意对应于干扰发生的时间百分比的两种结果也在表6中给出。
第一个是在一个或多个合成孔径雷达处于地球站视距内(比如,高于地平线)的情况下超出干扰标准的时间百分比;
第二个是整个仿真周期内超出干扰标准的时间百分比(比如,包含合成孔径雷达不在某些地球站直视范围内的时间)。
表5
dB
发射功率(瓦)
400.00
26.02
天线主瓣峰值增益(dBi)
27.90
天线旁瓣功率(dBi)
6.10
1/(4)
–2
7.9610
10.99
1/(距离)2(km)
97
 升级会员
升级会员 