计算机控制系统5教案.docx
《计算机控制系统5教案.docx》由会员分享,可在线阅读,更多相关《计算机控制系统5教案.docx(69页珍藏版)》请在冰豆网上搜索。
第5章 计算机控制系统特性分析
计算机控制系统特性分析就是从给定的计算机控制系统数学模型出发,对计算机控制系统在稳定性、准确性、快速性三个方面的特性进行分析。
通过分析,一是了解计算机控制系统在稳定性、准确性、快速性三个方面的技术性能,用以定量评价相应控制系统性能的优劣;更重要的是,建立计算机控制系统特性或性能指标与计算机控制系统数学模型的结构及其参数之间的定性和定量关系,用以指导计算机控制系统的设计。
本章主要内容有:
计算机控制系统稳定性分析,稳态误差与动态响应分析。
5.1计算机控制系统稳定性分析
与模拟控制系统相同,计算机控制系统必须稳定,才有可能正常工作。
稳定是计算机控制系统正常工作的必要条件,因此,稳定性分析是计算机控制系统特性分析的一项最为重要的内容。
5.1.1连续系统稳定性及稳定条件
离散系统稳定性和连续系统稳定性含义相同。
对于线性时不变系统而言,无论是连续系统还是离散系统,系统
-4-
稳定是指该系统在平衡状态下(其输出量为某一不随时间变化的常值或零),受到外部扰动作用而偏离其平衡状态,当扰动消失后,经过一段时间,系统能够回到原来的平衡状态(这种意义下的稳定通常称为渐近稳定)。
如果系统不能回到原平衡状态,则该系统不稳定。
线性系统的稳定性是由系统本身固有的特性所决定的,而与系统外部输入信号的有无和强弱无关。
线性时不变连续系统稳定的充要条件是:
系统的特征方程的所有特征根,亦即系统传递函数W(s)的所有极点都分布在S平面的左半平面,或者说,系统所有特征根具有负实部,设特征根si=si+jw,则si<0。
S平面的左半平面是系统特征根(或极点)分布的稳定域,
S平面虚轴是稳定边界。
若系统有一个或一个以上的特征根分布于S平面的右半平面,则系统就不稳定;若有特征根位于虚轴上,则系统为临界稳定,工程上也视为不稳定。
5.1.2S平面与Z平面的映射关系
在第3章中定义Z变换时,规定了z和s的关系为
z=eTs
(5.1)
式中,z和s均为复变量,T是采样周期。
设s=s+jw,则
(5.2)
�z=eTs
�=eT(s+jw)
�=esTejwT
z的模及相角分别为
(5.3)
�z=esT,及Ðz=j=wT
在实际计算机控制系统中采样频率ws远远大于系统中
被采信号的最高频率wmax,即ws>>2wmax(根据采样定理,
ws³2wmax,wmax
�£ws/2),就是说,系统实际工作频率
w范围在主频区-ws
�/2~+ws
�/2以内。
因而,我们在研
究S平面和Z平面之间的关系时,主要讨论S平面主频区
与Z平面之间的关系即可。
因为w=2p,1w=p,所以,
s T 2 s T
S平面主频区对应的w范围是-p~+p。
T T
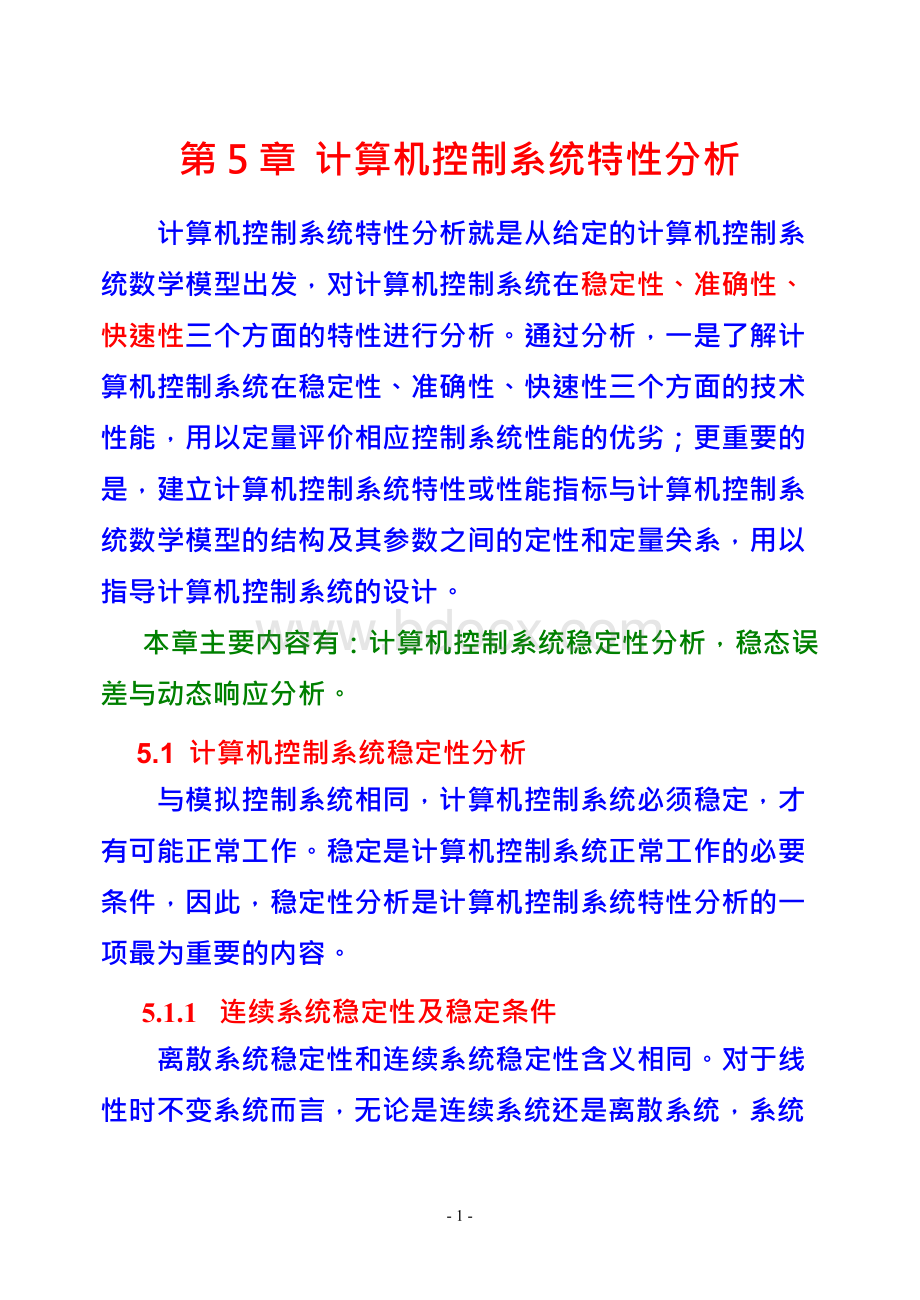
参看图5.1,图中S平面①~⑤主频区。
⑴ S平面虚轴上①~②段,
Z平面半径为1的上半圆。
�j0£
�jw£
�jp/T,映射到
因为s=jw,则z=eTs=ejwT=1ÐwT。
z的模z=1;相角
j=wT=0~p。
⑵ S平面②~③段,s=s+jw
�
,s=0~-¥,w=p/T。
因而,映射到Z平面上,z的模z
�=e(0~-¥)T
�=1~0,z的相
角j=wT
�=p。
该段对应于Z平面上的②~③段,实际上
它是与负实轴重合(沿着负实轴由-1变到0),但为了表示清楚,将②~③段同负实轴分开画出。
⑶ S平面③~④段,s=s+
�jw,s=-¥,
w=+p/T
�~-p/T。
因而,映射到Z平面上,z的模
jw
jpS平面
T
0
s
-jp
T
⑤
④
①
-¥
②
③
Im
Z平面
1
②
⑤
-1 ③
④0
①
Re
图5.1S平面与Z平面之间的关系
z=e-¥T
�=0,z的相角j=wT
�=p~-p。
③点、④点重合,
但相角改变了p。
⑷ S平面④~⑤段,s=s+jw,s=-¥~0,w=-p/T。
因而,映射到Z平面上,z的模z=e(-¥~0)T=0~1,z的相角
-5-
j=wT=-p。
该段对应于Z平面上的④~⑤段。
⑸ S平面⑤~①段,s 沿负虚轴变化,s=s+jw,s=0,w=-p/T~0。
因而,映射到Z平面上,z的模z=e0T=1,z的相角j=wT=-p~0。
对应于Z平面上的
⑤~①段,半径为1的下半圆。
⑹若s的实部s>0,则z的模z=esT>1。
以上的分析表明:
S平面左半面映射到Z平面单位圆内部;S平面右半平面映射到Z平面单位圆外部;S平面虚轴映射到Z平面单位圆上。
由此我们可以得出离散系统的稳定条件。
离散系统的稳定条件
如果离散系统脉冲传递函数的根,即特征方程的根都位于Z平面单位圆内部,则系统稳定;如果有一个根位于单位圆外部,则系统不稳定;如果有根位于单位圆上,则系统临界稳定。
图5.2中阴影部分即为两平面的稳定区。
jw
S平面左半平面
o<0
S平面
Im
Z平面
w=-¥~+¥
-1
1
Z平面单位圆内
z<1
Ðz=-¥~+¥
0
s
0
Re
图5.2S平面与Z平面的稳定区
5.1.3计算机控制系统的稳定性
现在进一步论证关于离散系统中脉冲传递函数在Z平面中的稳定区问题。
设图5.3为某离散系统(或环节)的
R(z)
C(z)
G(z)
5.3离散控制系统
方框图,脉冲传递函数为
bzm+bzm-1+L+b
G(z)=0 1 m
zn+azn-1+L+a
1 n
(5.4)
式中m£n,设m=n,式(5.4)的分母写成因式相乘的形式
-7-
G(z)=b
�+b'zn-1+b'2
�zn-2+L+b'n
1
1
n
0 zn+azn-1+L+a
1
0
=b+
�b'zn-1+b'2
�zn-2+L+b'n
(z-p1)(z-p2)L(z-pn)
设输入
�(5.5)
r(k)为单位脉冲函数
�
d(k)=ì1,
í
î0,
�
k=0
,
k¹0
Z[r(k)]=Z[d(k)]=1,
即R(z)=1,因此
C(z)=G(z)R(z)=G(z)
(5.6)
�C(z)=b0+
�d1
z-p1
��+d2
z-p2
�+L+
�dn
z-pn
式中p1,p2,L,pn是脉冲传递函数的极点。
系统脉冲响应为
c(k)=Z-1[C(z)]=Z-1éb+ d1
��+d2
�
+L+
�dn ù(5.7
ê0 z-p z-p z-pú
ë 1 2 nû
)
上式中第一项的Z反变换为b0d(k),
�k=0。
其余各项为
(5.8)
�di =
z-pi
�dz-1
i
-1
1-piz
�i=1,2,L,n
式(5.8)的Z反变换为
-é dz-1
�ù= ³
ê ú
ii
Z1 i
1-pz-1
�dpk-1,k 1
(5.9)所以
�ë i û
ìb0d(k),
c(k)=í
�k=0
(5.10)
�îdipik-1,
�k³1
系统脉冲响应分析:
c(k)的第一项b0d(k)只是在
k=0时存在,b0是系统脉冲响应的初值。
极点
p1,p2,L,pn所对应脉冲响应为dipik-1,
�di为常数,
i=1,2,L,n。
pi可能是实数(可能是正实数,也可能是
负实数);也可能是复数。
1若p1,p2,L,pn为实数
随着k的变化,对于不同的pi,其脉冲响应也随之不同,
参看图5.4。
①pi>1时,系统对应的输出分量是发散序列。
图5.4
中极点p1
�>1,其输出为pk-1,是发散序列;
-8-
1
②pi=1时,对应的输出分量是等幅不衰减序列,如图
5.4中p2=1点;
Im
pk-1
Z平面
6
p1
k-1
× p×
-1
1
p
×
× × ×
6
5
p
4
p
p p
3
2 1
Re
pk-1
5
pk-1
2
pk-1
4
pk-1
3
图5.4离散系统实数极点相应的脉冲响应
③03
如图5.4中pk-1;
4
i i
④-15
i i
⑤p=-1时,对应的输出分量pk-1是交替变号的等幅序列,如图5.4pk-1;
6
i i
⑥p<-1时,对应的输出分量pk-1是交替变号发散序列,如图5.4pk-1。
2若p1,p2,L,pn极点中含有共轭复数对
若p1,p2,L,pn极点中含有共轭复数对时,则复数对极点所对应的系统脉冲响应为振荡序列。
令共轭极点对为
-26-
pi1,2
�=ai±
�jbi,一般我们将共轭极点对所对应的部分分式
写成如下形式
C(z)=
�ciz+di =
�A + B
i (z-a)2+b2
�z-a
��-jb z-a+jb
i i
(5.11)
�i i i i
式中,Ci(z)的两个极点为
zi1
�=ai+
�jbi
�=Rejqi,
�zi2
�=ai-
�jbi
�=Re-jqi
i
i
(5.12)
Ci(z)所对应的脉冲响应为下列组合
c(k)=A(Rejqi)k-1+B(Re-jqi)k-1
�,k=1,2,L
i i i
上式中A,B的值可以由式(5.11)计算出。
而k的值由1开始算起,是由于式(5.11)的分式中,分母z的阶数比分子z的阶数大于1,k=0时,ci(0)=0。
经化简、合并计算,得出
íi
c(k)=ì
 升级会员
升级会员 