600MW单元机组协调控制系统设计Word文档下载推荐.docx
《600MW单元机组协调控制系统设计Word文档下载推荐.docx》由会员分享,可在线阅读,更多相关《600MW单元机组协调控制系统设计Word文档下载推荐.docx(33页珍藏版)》请在冰豆网上搜索。
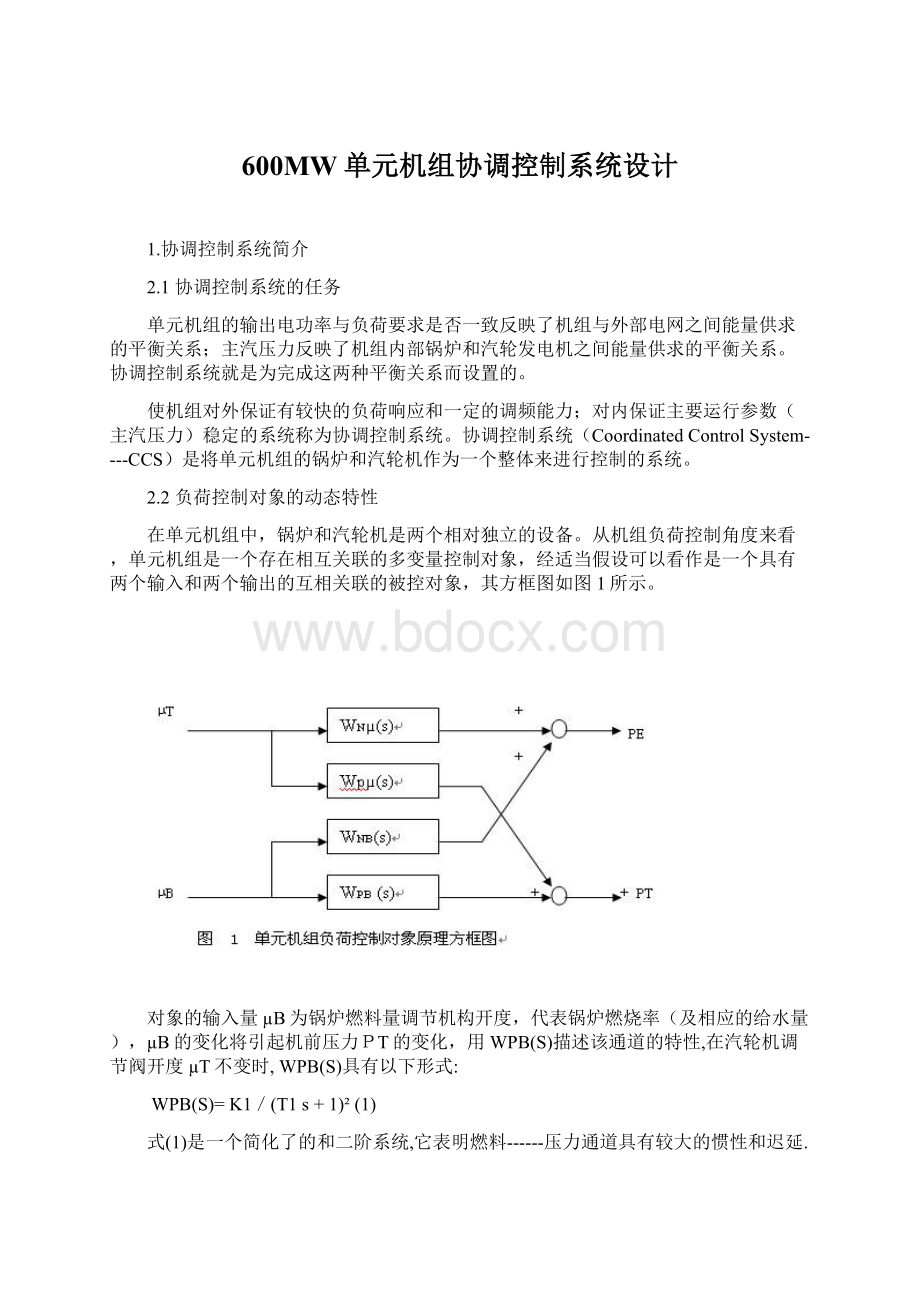
从机组负荷控制角度来看,单元机组是一个存在相互关联的多变量控制对象,经适当假设可以看作是一个具有两个输入和两个输出的互相关联的被控对象,其方框图如图1所示。
对象的输入量µ
B为锅炉燃料量调节机构开度,代表锅炉燃烧率(及相应的给水量),µ
B的变化将引起机前压力PT的变化,用WPB(S)描述该通道的特性,在汽轮机调节阀开度µ
T不变时,WPB(S)具有以下形式:
WPB(S)=K1/(T1s+1)²
(1)
式
(1)是一个简化了的和二阶系统,它表明燃料------压力通道具有较大的惯性和迟延.
在燃烧率变化后,在汽轮机调门开度µ
T不变时,pT的变化也将引起机组实发功率PE的变化。
图1中,WNB(s)是燃料一切通道的传递函数,它具有如下形式:
WNB(S)=K2/(T2s+1)²
(2)
在机组燃烧率保持不变,将汽轮机调节阀门开度通常用同步器位移量表示µ
T改变,它将引起机前压力pT的变化,以及机组实发功率PE的变化,这两个通道的传递函数WNµ
(S)、WPµ
(S)形式如下:
WPµ
(S)=—[K3+(K4/T4s+1)](3)
WNµ
(S)=[K5/(T5s+1)]—[K6/(T6s+1)²
](4)
以上四个式子是通过实验方法得到的,通过理论分析和线性化处理也可得出以上关系。
以上用传递函数表示单元机组的动态特性,也可用阶跃响应来表示单元机组的动态特性如图2所示。
2.2.1燃烧率µ
B扰动下主蒸汽压力pT和输出电功率PE的动态特性
当汽轮机调门开度不变,而µ
B发生阶跃扰动时,主蒸汽压力pT和输出电功率PE的响应曲线如图2(a)所示。
增加锅炉的燃烧率,必定使锅炉蒸发受热面的吸热量增加,汽压经一定延迟后逐渐升高。
由于汽轮机调门开度保持不变,进入汽轮机的蒸汽流量增加,从而自发地限制了汽压的升高。
当蒸汽流量与燃烧率达到新的平衡时,汽压pT就趋于一个较高的新稳态值,具有自平衡能力。
由于蒸汽流量的增加使汽轮机输出功率增加,输出电功率PE也增加。
当蒸汽流量不变时,输出电功率趋于一个较高的新稳态值,具有自平衡能力。
2.2.2调门开度µ
T扰动下主蒸汽压力pT和输出电功率PE的动态特性
当锅炉燃烧率µ
B保持不变,而µ
T发生阶跃扰动时,主蒸汽压力pT和电功率PE的响应曲线如图2(b)所示。
汽轮机调门开度增加后,一开始进入汽轮机的蒸汽流量立刻成比例增加,同时汽压pT也随之立刻阶跃下降△pT(△pT阶跃下降的大小与蒸汽流量的阶跃增量成正比,且与锅炉的蓄热量大小有关)。
由于锅炉燃烧率保持不变,所以蒸发量也不变。
蒸汽流量的增加是因为锅炉汽压下降而释放出一部分蓄热,这只是暂时的。
最终,蒸汽流量仍恢复到与燃烧率相应的扰动前的数值,主汽压力pT也逐渐趋于一个较低的新稳态值。
因蒸汽流量在过度过程中有暂时的增加,故输出功率PE相应也有暂时的增加。
最终输出功率PE也随蒸汽流量恢复到扰动前的数值。
可以看出机组增加负荷时,初始阶段所需的蒸汽量要是由于锅炉释放蓄热量而产生的。
然而,随着汽轮机容量的日益增大,锅炉蓄热量越来越小,单元机组负荷适应能力与保持汽压不变之间的矛盾越来越突出。
通过以上分析,可以看出负荷控制对象的动态特性的特点是:
当汽轮机调门开度动作时,被控量PE和pT的响应都很快即热惯性小;
当锅炉燃烧率改变时,PE和pT的响应都很慢即热惯性大,一快一慢就是机炉对象动态特性方面存在的较大差异。
我们把机、炉子控制系统包括在负荷控制对象之内,就构成了广义负荷控制对象如图3所示,其控制输入量为锅炉主控制指令PB和汽轮机主控制指令PT。
锅炉侧的子控制系统的动态迟延惯性很小(相对与锅炉特性),可以使µ
B及时地跟随炉主控制指令PB接近快速动随动系统特性。
这样就有µ
B≈PB。
汽轮机侧,如果汽轮机采用纯液压调节系统,则机主开控制指令PT就是调门开度(或同步器位移)指令µ
T,故有µ
T=PT。
这样广义被控对象的动态特性不会改变。
如果汽轮机采用功频电液控制系统,则机主控制指令PT就是汽轮机功率指令。
这样被控对象的动态特性就有很大变化。
如图4所示。
由图4可以看出,汽轮机采用功频电液调节系统时,广义被控对象动态特性的改变是由于汽轮机功率调节回路的存在,假设功率调节回路能保持汽轮机功率与功率指令一致,那么,机主控制指令PT炉主控制指令PB就分别代表锅炉的输出与输入能量。
若保持其中任一指不变而另一指令阶跃扰动,则会因锅炉输入与输出能量始终不平衡,主蒸汽压力pT随时间一直变化,没有子平衡能力。
如图5所示。
图5(a)表示PT不变,PB阶跃扰动下主蒸汽压力pT和电功率PE的响应特性,pT的动态特性近似为具有惯性的积分环节特性,PE近似不变。
图5(b)表示PB不变,PT阶跃扰动下主蒸汽压力pT和电功率PE的响应特性,pT的动态特性近似比例加积分环节的特性,PE的动态特性近似为惯性环节或比例加惯性环节的特性。
锅炉和汽轮发电机的动态特性存在很大差异,即汽轮发电机负荷响应快,锅炉负荷响应慢,所以单元机组内部两个能量供求关系互相制约,外部负荷响应性能与内部运行参数稳定性之间存在固有的矛盾。
根据这一特点,单元机组在实施协调控制时,必须很好地协调机炉两侧动作,合理地保持好两个能量供求平衡关系,以兼顾负荷响应性能和内部运行参数稳定两个方面。
2.3协调控制系统的主要功能
2.3.1参与电网调峰、调频
特别使随着电网负荷昼夜峰谷差的急剧上升,电网对机组参与调峰要求日益增高,世界上出现了各种夜间低负荷运行,两班制运行,周末停运…….的中间负荷机组。
要求机组控制具有更快速、更灵活的负荷响应,并且在更大的负荷变化范围里,甚至0—100%全程,CCS能够投入自动。
调峰使按电网昼夜的负荷变化,视该机组在电网中的地位与经济效益,有计划地,大幅度地进行调度控制。
而调频则是瞬时的,有限制地,按该机组CCS系统设定的频差校正特性(不等率、死区、限幅值)校正机组负荷。
2.3.2稳定机组运行
CCS系统检测与消除机组运行的各种内外扰动,协调锅炉与汽机的能量平衡。
协调锅炉内部燃料、送风、引风、给水…….各子回路的能量平衡与质量平衡。
机组的稳定运行,机炉的能量平衡就是以机前压力的稳定为标志。
2.3.3机组出力与主、辅机实际能力的协调
机组运行可能出现局部故障,抑或负荷需求超过了机组届时的实际能力,就会产生需要与可能的失调。
CCS的可靠性设计,提供有方向闭锁(DirectionalBlock),修正机组指令,强迫缓慢下降/回升(Rundown/Runup),辅机故障减负荷(Runback)与暂停功能。
使系统在主辅机或子回路控制能力受限制的异常工况下自动变“按需要控制”为“按可能控制”,照常安全保持机组指令与机组能力的平衡,锅炉与汽机的能力平衡以及锅炉燃料、送风、给水……子回路之间的能力平衡。
此外,与电厂其他控制系统一起,CCS还提供有锅炉跳闸(MFT)与机组甩负荷(FCB)的事故处理能力。
如国外有的机组,就有主变,油开关跳闸时“带厂用电运行”,汽机跳闸时“停机不停炉”的FCB控制功能。
2.3.4具有多种选择的运行方式
CCS系统设计,必须满足机组各种工况运行的需要;
提供可供运行人员选择或联锁自动切换的相应控制方式。
系统方式的切换,均为无扰动过程;
并且,切除机或炉的某一部分自动,并不影响CCS系统的稳定运行,使CCS具有在各种工况下,正常运行启动、低负荷或局部故障条件,都投入自动的适应能力。
2.4协调控制系统的组成
单元机组协调控制系统是由负荷控制系统也称主控系统,常规控制系统也称子控制系统和负荷控制对象三大部分组成的。
如图6所示。
负荷控制系统又由二部分即负荷指令处理部分也称负荷管理控制中心和机炉主控制器组成。
负荷管理控制中心(LoadManagementControlCenter——LMCC)接受的是外部负荷指令、根据机组和控制系统本身需要所设的内部负荷指令。
内部负荷指令一般有机组辅机故障减负荷Runback(快速返回)指令,与机组负荷有关的主要运行参数超过上限而引起的减负荷Rundown(迫降)指令。
主要运行参数低于下限而引起的增负荷Runup(迫升)指令,负荷控制系统处于手动状态时,负荷控制系统本身跟踪实发功率的信号。
外部负荷指令一般有电网调度所的负荷分配指令ADS(AutomaticDispathSystem)、机组运行人员手动增/减负荷的指令。
负荷管理管理控制中心的主要作用是对外部要求的负荷指令或目标负荷指令TLD(TargetLoadDemand)进行选择,并根据机组主辅机运行情况加以处理,使之转变为机、炉设备负荷能力,安全运行所能接受的实际负荷指令ALD(ActualLoadDemand)P0,实际负荷指令又称ULD(UnitLoadDemand)单元机组实际负荷指令。
对于上述内、外部负荷指令的选择是由负荷管理控制中心根据机组的运行状态和电网对机组的要求以及机炉本身运行安全性要求的优先级来选定的。
除了选择负荷指令外,负荷管理控制中心对于选择的内、外部负荷指令还需要进行处理,主要是对负荷指令的变化率和起始变化幅度进行限制,使之与机组的负荷能力相适应。
机、炉主控制器接受LMCC发出的实际负荷指令P0,为了使锅炉和汽轮机的控制作用更好地协调,在协调控制方式情况下,汽轮机主控制器接受汽轮机的DEH(DigitalElectroHydraulic即数字电液调节)来的频率偏差信号Δf,还接受汽轮机首级后压力p1与主汽压力pT的比值p1/pT的反馈信号,即汽轮机阀位的反馈信号,以及实发功率信号PE和主汽压力的偏差Δp。
机、炉主控制器的主要作用是根据锅炉和汽轮机的运行条件和要求,选择合适的负荷控制方式,按照实际负荷指令P0与实发功率信号PE的偏差和主汽压力的偏差Δp以及其他信号,进行控制运算,分别产生对锅炉子控制系统和汽轮机子控制系统的协调动作的指挥信号,分别称为锅炉指令(BoilerDemand)PB和汽轮机指令(TurbineDemand)PT。
单元机组主控制系统是单元机组协调控制系统的核心。
在单元机组协调控制系统中无论是调频和调负荷、机组的启动和停止、故障情况下的安全运行、锅炉燃烧率的变化、汽轮机调节汽阀开度的变化都是在主控制系统统一的指挥下达到协调一致的,即机组的输入能量和输出能量在满足电网负荷要求的前提条件下总是保证平衡的。
完成主控制系统与子系统之间的协调。
一般汽轮机和锅炉的控制系统都是比较简单的单、回路和常规的控制系统,这些系统能克服由于内、外扰动造成的参数波动,使之保持在允许的范围之内。
同时也适应负荷控制系统发来的变负荷指令信号,使每个子系统都能在主控制系统的统一指挥下协调动作,完成子系统与单元机组(控制对象)之间的协调,使整个单元机组安全经济运行。
机炉的子控制系统是协调控制的基础,它们的控制质量将直接影响负荷控制的质量。
因此,只有设计好各子控制系统,并保证其具备较高控制质量的前提下,才有可能使协调控制系统达到要求的控制质量。
根据单元机组的容量、控制对象动态特性的特点、控制系统功能要求不同等组成的协调控制系统的方案各异,但将这些协调控制系统进
 升级会员
升级会员 