平面双连杆机械臂动态模型_精品文档.docx
《平面双连杆机械臂动态模型_精品文档.docx》由会员分享,可在线阅读,更多相关《平面双连杆机械臂动态模型_精品文档.docx(6页珍藏版)》请在冰豆网上搜索。
构建平面双连杆机械臂动态模型
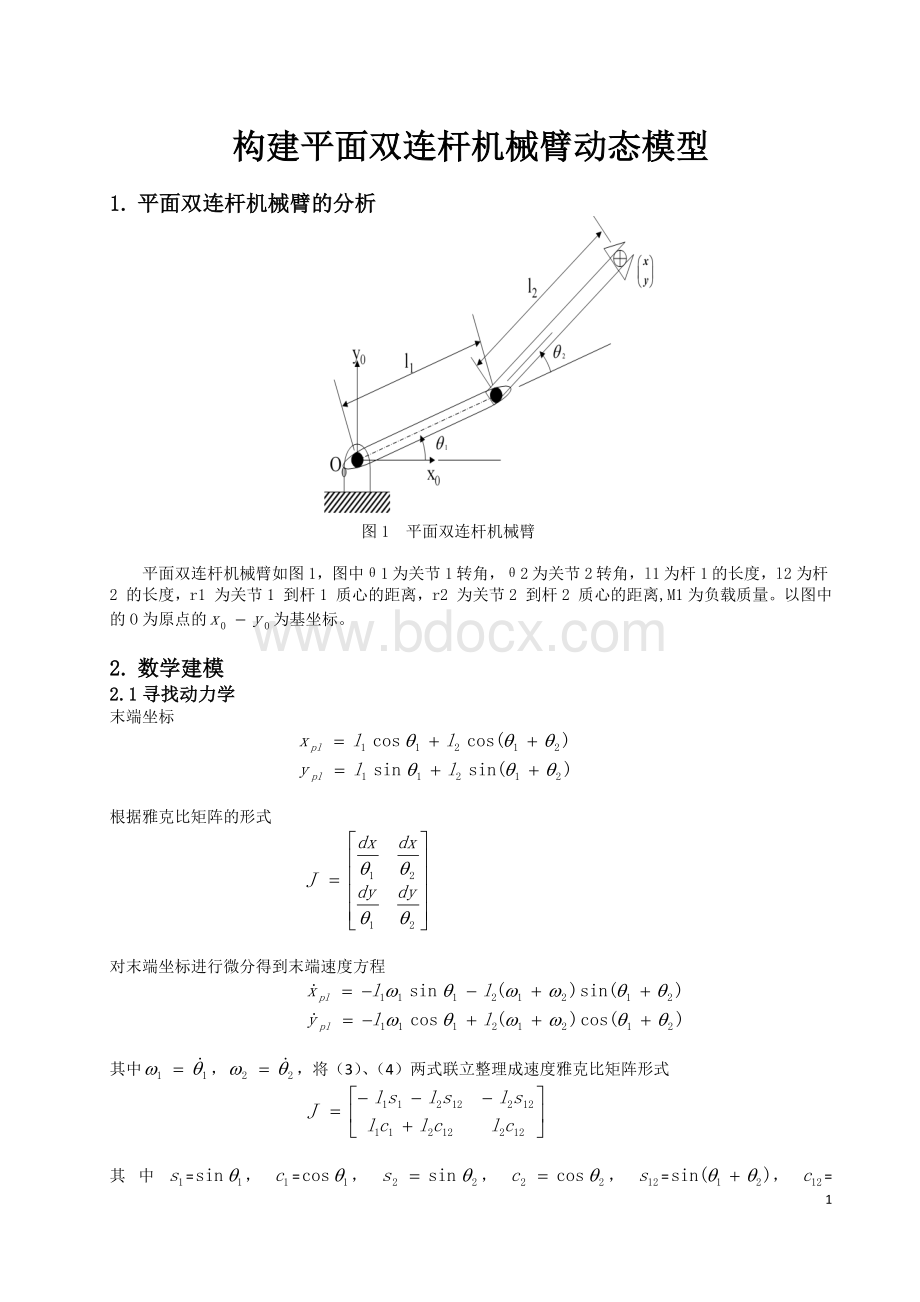
1.平面双连杆机械臂的分析
图1平面双连杆机械臂
平面双连杆机械臂如图1,图中θ1为关节1转角,θ2为关节2转角,l1为杆1的长度,l2为杆2的长度,r1为关节1到杆1质心的距离,r2为关节2到杆2质心的距离,M1为负载质量。
以图中的O为原点的为基坐标。
2.数学建模
2.1寻找动力学
末端坐标
根据雅克比矩阵的形式
对末端坐标进行微分得到末端速度方程
其中,,将(3)、(4)两式联立整理成速度雅克比矩阵形式
其中=,=,,,=,=。
在机器人基础坐标系中的速度与各关节速度间的关系以及手部与外界接触力与对应各关节间的关系可以利用雅克比矩阵来建立。
对机械臂末端速度方程(3)、方程(4)进行求导得到末端加速度方程如下
其中=,=,上述推导的方程构成了进行动力学仿真的基础,它们表明了有效负荷的加速度与
两节点处电动机的角速度和角加速度之间的关系。
机械臂质心位置的加速度和关节处的变量之间关系方程如下
2.2构建拉格朗日模型
2.2.1选定广义关节变量及广义力
选取笛卡尔坐标系。
θ1为关节1转角,θ2为关节2转角,关节1和关节2相应的力矩是和。
连杆1和连杆2的质量分别为和,l1为杆1的长度,l2为杆2的长度,质心分别为和r1为关节1到杆1质心的距离,r2为关节2到杆2质心的距离。
因此,杆1质心的位置坐标为
杆1质心速度的平方为
杆1质心的位置坐标为
杆1质心速度的平方为
2.2.2系统动能
2.2.3系统势能
2.2.4拉格朗日函数
2.2.5系统动力学方程
根据拉格朗日方程式计算各关节上的力矩,得到系统动力学方程。
计算关节1上的力矩
所以
计算关节1上的力矩
所以
2.3建立动力方程
将两个关节电机输入转矩作为输入,根据2.1中的角度、角速度、角加速度的方程和建立的拉格朗日方程,我们可以建立含14维矩阵的动力方程如下:
3.二连杆机械臂的动力学matlab/simulink仿真
图2是一个合理的Simulink模型原理图。
值得注意的是,到两个电动机的转矩被输入到了仿真系统中,而且轴承摩擦力的简单模型也加了进去。
一般来说,摩擦是组织运动并且和速度有关的力或者力矩。
在图5中采用了一种线性的摩擦力模型。
在该模型中,抵抗输入转矩的摩擦力矩与转速成正比。
两个标“Damp2ing”的增益模块标示的是由于轴承和电动机的黏滞阻尼而产生的速度的损失,这些系数的实际值是很难确定的,但是在操纵机器人装置时,某些能量的消耗是客观存在的,在模型中缺少对能两消耗的考虑将会导致较大的误差和得到不符合实际的仿真结果。
图2simulink仿真图
初始条件选择θ1=0和θ2=π/2rad。
这对机械臂的末端位置xpl=1.0和ypl=1.0。
如同所有的仿真一样,积分求解器的促使条件必须是相容的。
为了在仿真中获得较高的可信度,需要做一个简单的实验。
回想一下机械臂在垂直平面工作时在重力作用下的受力图。
因此,如果让机械臂从任何初始位置开始运动,将输入的转矩值设置为零,那么机械臂将在自重的作用下下落,最后到达两个连杆都在一条铅垂线上的位置。
图3给出了机械臂Simulink仿真图,其上数据点表明了机械臂末端位置随时间变换的规律。
曲线图中显示的运动轨迹与我们所想到的让机械臂在自重作用下下降的运动情形相一致。
图4给出了关节转角θ1和θ2的转角曲线,在经过一定的仿真时间后,机械臂运动趋于稳定后,两关节的转角像设想的一样θ1变为-π/2,θ2变为0与机械臂在自重下结束态姿相吻合。
图3simulink仿真结果曲线
图4关节转角θ1和θ2的变化曲线
我们得到了一个平面二连杆机械臂动态模型并在Simulink环境下实现了这个模型。
这种模型的仿真是很难在更为一般的环境下实施的,这是因为封闭形式的运动方程是非常复杂的,也是很难精确解答的。
另外这种类型的仿真对于了解复杂的多链式机器人操纵装置的动力特性以及在解决对这些系统实施控制过程中遇到的困难时是非常有用的,机械臂运动学模型的建立是研究机械臂轨迹规划和控制策略的前提和基础。
4.总结
通过机器人控制技术这门课程的学习和这个报告的编写,我对机器人工作原理有了大概的概念。
主要是以机械臂底座为原点建立基坐标,利用坐标转换知识可以将目标的坐标和机械臂末端的坐标转换成基坐标表示,这样就可以解决目标物和机械臂末端的定位问题;再就是利用动力学知识(雅克比矩阵和拉格朗日方程)来求取速度和加速度等,使其能够达到控制要求;最后就是规划机械臂的运动轨迹来确定机械臂是按什么样的轨迹进行运动的。
6
 升级会员
升级会员 