M2激光模式测量_精品文档.doc
《M2激光模式测量_精品文档.doc》由会员分享,可在线阅读,更多相关《M2激光模式测量_精品文档.doc(13页珍藏版)》请在冰豆网上搜索。
激光模式(M2)的测量
一、实验的目的和意义
如何评价一个激光器所产生的激光光束空域质量是一个重要问题。
人们根据不同的应用需要将聚焦光斑尺寸、远场发散角等列为衡量激光光束空域质量的参数。
但由于当激光通过光学系统后,光束的光腰尺寸和发散角均可改变,减小腰斑直径必然使发散角增加。
因此单独用其中之一来评价激光光束空域质量是不科学的。
人们发现:
经过理想的无像差的光学系统后“束腰束宽和远场发散角的乘积不变”,而且可以同时描述光束的近场和远场特性。
目前国际上普遍将“光束衍射倍率因子M2”作为衡量激光光束空域质量的参量。
它的一般定义为:
(1)
激光光束传输质量因子M2是一种全新的描述激光光束质量的参数。
本实验介绍了M2的物理概念、物理意义、特点及测量方法。
并对下面三个方面进行了解。
1了解M2的定义;
2了解M2实验原理;
3了解M2的测试过程;
二、实验原理
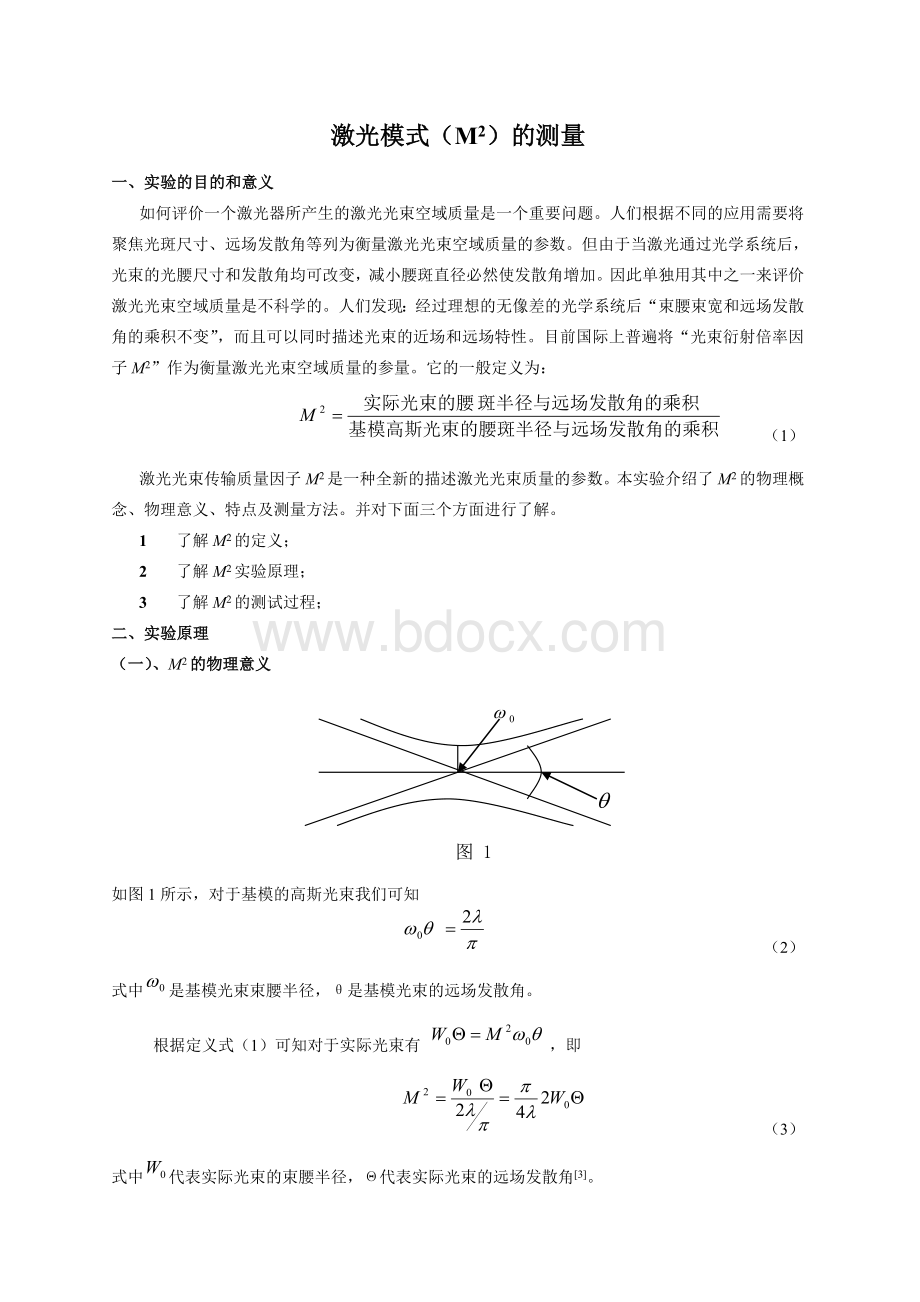
图1
(一)、M2的物理意义
如图1所示,对于基模的高斯光束我们可知
(2)
式中是基模光束束腰半径,θ是基模光束的远场发散角。
根据定义式
(1)可知对于实际光束有,即
(3)
式中代表实际光束的束腰半径,Θ代表实际光束的远场发散角[3]。
图2无像差透镜对束腰和发散角的变换
下面我们根据“束腰的束宽和远场发散角的乘积不变原理”对进行推导。
(4)
式(4)可由量子力学的测不准原理来解释:
在束腰处光子的位置不确定度是最小值是单模高斯光束束腰束宽;光子的横向不确定度是,在近轴近似条件下
(5)
式中h为普朗克常数,最小值是单模高斯光束远场发散角
(6)
根据测不准关系:
(7)
对一般光束束腰处有:
代入Eq(7)有
(8)
定义光束质量因子为:
(9)
又因为实际光束的截面常常不是圆形的,即光束的光强分布不是对称的或存在像散时,光束质量应用两个参数来描述:
(10)
、是分别表示X方向和Y方向的光束质量因子。
考虑到是单模高斯光束的衍射极限,的物理意义也可理解为衍射极限倍数[3]。
(二)、因子的特点
以因子表征光束质量有几个显著的优点:
首先:
因子能够确定和度量多模光束的质量。
工业上应用的大功率激光器,如大多数千瓦级CO2激光器输出厄米---高斯混合模光束,并且在高阶模产生振荡,这种混合模光束的光束质量因子是各个模相对强度的加权平均。
(11)
是相对振幅系数,m、n是模的阶数,厄米—高斯混合模光强空间分布可表示为:
(12)
嵌入高斯光束
实际光线
图3嵌入高斯光束
Θ
θ
是光束半宽,、是厄米多项式,各阶模的光强分布有相同的高斯因子,传播相同的距离后光束发散程度相同,因而也有相同的瑞利距离和波面曲率半径R。
可以设想在多模光束中构造一个“嵌入高斯光束”,它与多模光束有这样的关系----在激光的传播方向上,任意位置Z处其腰斑直径d是同一位置多模光束的腰斑直径D的,并且具有相同的束腰位置和瑞利距离
如图3所示:
;;
多模光束的衍射极限(13)
因此,在多模光束引入“嵌入高斯光束”后,因子同样可以理解为多模光束远场发散角与衍射极限之比即衍射极限倍数。
其次,因子能描述多模光束的传播特性。
光束的传播方程、波面曲率半径、复曲率半径,以及通过近轴光学系统传播的ABCD矩阵等都具有高斯光束的类似表达式[3]。
(三)、的测量
由的定义可知,只要知道实际光束的腰斑直径最小值和远场发散角即可算出的大小。
但激光光束的“束腰”可能位于激光器好几米之外,也可能位于谐振腔内,这样就使确定束腰位置较难,因此通常不对自由光束直接测量,而是用一个无像差透镜将自由光束聚焦,然后在像空间测量有关参数,最后折算为物空间对应数值-----这种方法被称为“透镜变换法”。
这种方法至少带来三个好处:
1能实现远场测量。
远场定义是指到束腰的距离的区域(D为束腰直径),自由光束经聚焦后,,实现远场测量要容易得多。
2像方束腰位置漂移较少,因为自由光束准直度较高,聚焦后的束腰必位于像方焦点附近,这给测量带来极大方便。
3可以降低由于限制孔径而引起的衍射效应对近场束宽测量的影响。
如图4所示:
在像方测量不同位置处的光束腰斑直径,当测量数据足够多时,理论上应该包括像方的“束腰”直径。
如果不能确定,可利用公式[2]进行数据拟合。
算出和。
利用透镜成像公式可以算出,进而利用得到。
图中是透镜的两个主面,是主面到两个“束腰”的距离[4]。
图4
f
f
物方
像方
Z轴
Θ
下面是的测量。
透镜的转换因子为:
(14)
,(15)
(16)
这样利用上述等式可以得到:
通过测量像方焦平面的光束腰斑直径可得出物方的发散角:
(17)
证明如下:
这样我们测得焦平面处的光束腰斑直径后利用Eq(17)即可算出。
在实际应用中还可以利用其它方法来测量。
比如可以分别测量物方和像方的焦平面处的腰斑直径。
利用公式
[5(18)
算出结果。
如图4所示
三、实验装置
1氦氖激光器;
2Ls-2000激光器光束分析仪;
Ls-2000激光光束分析仪组成:
①基本系统:
Ls-2000专用图像采集卡及专用软件包;
②图像探测器(CCD);
③电脑;
④光学暗箱(光路图见后)[1]。
四、实验内容
1了解测量的光路;
2测量像方不同位置的光束束束宽直径;
3计算物方束腰直径;
4计算;
五、实验步骤
1、调节光路,使通过透镜(组)的光线与CCD接收区共轴。
若已共轴,单击图标,打开软件,单击应能看见实时变化的激光光斑花样,移动CCD,在导轨任何位置上应都能看到光斑;
2、将CCD远离透镜,固定,观察光斑花样。
当确定要保留光斑花样后,在图像的空白区域内双击;再单击,在左侧任意空白区域内双击,显示激光的3D光斑花样效果图;单击,任选意空白区域双击,显示X轴和Y轴的光强曲线;
3、单击,以确定光束的“光心”(光强质心);
4、单击,在剩下的空白区域内双击,显示光束的一些分析参数;
5、打开菜单edit,选择copy,将所有图像和数据放入windows的剪贴板中,利用“画图”或其它图像软件保存;(见图5)
图5
6、关闭,通过在图像上双击鼠标左键的方法,重新定位XY轴的交点,(双击点即为新的XY轴坐标交叉点),这样可以自己确定光束的“光心”,然后单击,重复步骤5;(见图6)
7、将CCD移动到另一位置,重复2、3、4、5、6。
8、记录下各个位置的光束直径,找出直径最小的位置及最小直径,利用透镜成像公式算出物方的对应数值即物方束腰的大小;
9、找出像方焦平面的束腰直径,算出物方发散角;
图6
此种方法显示的光束直径分为X方向和Y方向。
六、实验讨论
现选取一组数据:
位置
X
Y
1610
4.16
2.32
4.12
2.23
1615
4.19
2.30
4.16
2.28
1620
4.15
2.27
4.18
2.25
1625
4.32
2.30
1630
4.27
2.35
4.26
2.32
1635
4.33
2.37
1640
4.23
2.37
4.23
2.33
1645
4.23
2.38
4.25
2.36
1650
4.28
2.42
4.30
2.46
1655
4.30
2.46
4.30
2.46
1660
4.23
2.44
4.02
2.39
1665
4.26
2.47
4.11
2.41
1670
4.31
2.50
4.04
2.43
1675
4.28
2.50
4.11
2.43
1680
4.18
2.49
4.03
2.45
1685
4.15
2.50
4.20
2.43
1690
4.07
2.47
4.15
2.45
1695
4.16
2.52
4.08
2.47
1700
4.11
2.52
4.06
2.47
1710
4.07
2.55
4.11
2.47
1720
4.05
2.56
4.06
2.48
1730
4.01
2.56
4.01
2.55
1740
4.08
2.62
4.08
2.59
1750
4.07
2.64
4.07
2.61
1760
4.10
2.67
4.08
2.65
1770
4.15
2.72
4.15
2.69
1780
4.18
2.73
4.23
2.71
1790
4.17
2.79
4.15
2.72
1800
4.15
2.79
4.13
2.74
1810
4.28
2.92
4.19
2.88
1820
4.28
2.90
4.25
2.86
1830
4.34
2.90
4.34
2.85
1840
4.34
2.90
4.34
2.89
(上表中,X、Y列数据是根据由计算机选定的“光心”得出的,列数据是根据由手动选定的“光心”得出的。
)
在处理数据时,采用的是上表中“Y”列的数据---其中1620、1810两点的数据未采用。
利用“origin”软件进行数据拟合---拟合出参数---像方束腰半径,---像方束腰位置。
==0.152mm;==750.20mm。
(由于不清楚透镜组的参数,所以无法测量像方焦平面处的光斑直径,并且无法计算物方的“束腰半径”和“发散角”。
另由于激光器发光不太稳定,以及由于光路的一些原因,激光的光斑花样有衍射现象,这使得测量出现误差。
)
附录----软件说明[1]
第一组命令按钮(上图左数第1—3个命令按钮)用于启动图像采集。
Snap——从动态图像中抓取一张静态图像;
Live——显示来自摄像机的动态图像;
Redraw——当从新设置了XY轴的位置后,点击次命令按钮可以重新计算并显示XY轴的统计数据;
第二组命令按钮(左数第4—12个命令按钮)用于图像分析。
当点击了这些命令按钮后,光标将变为所选定的命令按钮的样子,此时将光标以入品目左边三个分析结果显示方框中的一个,并双击鼠标左键,被选中的方框中将显示相应的分析数据、分析曲线或三维图像(如下图)
三个分析结果显示方框用鼠标拖动此处可改变显示方框的面图像显示方框
各个按钮的功能如下:
XProfile——显示X轴光强曲线;此时X轴的位置处于图像的中心,也可以在图像上双击鼠标左键以重新确定X轴
 升级会员
升级会员 